

Глава 5. Задающие и исполнительные устройства
-
КЛАССИФИКАЦИЯ ЗАДАЮЩИХ И ИСПОЛНИТЕЛЬНЫХ
УСТРОЙСТВ
Задающие устройства предназначены для задания требуемого значения регулируемого (управляемого) параметра. По виду вырабатываемых сигналов задающие устройства подразделяют на два основных класса: аналоговые и цифровые. Аналоговые в свою очередь делят на непрерывные и дискретные, при этом дискретность может осуществляться как во времени, так и по значению вырабатываемого сигнала. Цифровые задающие устройства формируют только сигналы дискретных уровней.
Существенным признаком классификации является род энергии вырабатываемых сигналов. В соответствии с этим признаком различают задающие устройства с электрическими, пневматическими, гидравлическими и механическими (в виде перемещений и усилий) сигналами. Для своей работы задающие устройства потребляют энергию от внешнего источника, вид которой может не совпадать с видом энергии сигнала. Так, например, в регуляторах прямого действия задающие устройства обычно вырабатывают механические сигналы, а для своей работы потребляют электрическую энергию.
Одним из важнейших признаков задающих устройств является вид носителя программы. В задающих устройствах непрерывного действия наиболее часто для этих целей используют кулачковые и рычажные механизмы, функциональные потенциометры и бумажную диаграмму. В задающих устройствах дискретного действия находят применение многоцепные переключатели, перфокарты и перфоленты, магнитная пленка и кинопленка.
Исполнительное устройство является промежуточным преобразователем, состоящим из двух самостоятельных узлов: исполнительного механизма и регулирующего (управляющего) органа.
Исполнительные механизмы предназначены для воздействия через регулирующий орган или непосредственно на объект управления. В исполнительный механизм входят двигатель и передаточное устройство. Основными параметрами, характеризующими работу исполнительных механизмов, являются усилие на выходе механизма, коэффициент усиления по мощности, линейное или угловое перемещение, частота вращения, быстродействие и т. п.
В зависимости от управляющего воздействия на выходе различают два вида исполнительных механизмов: силовые и параметрические.
Если исполнительные механизмы создают управляющее воздействие на регулирующий орган в виде силы или момента, то такие механизмы называют силовыми. К этой группе относятся электромагниты, электромеханические муфты, различного вида двигатели. Если изменение состояния регулирующего органа связано с изменением его параметров (сопротивления, магнитного потока, температуры, скорости и т. п.) или параметров подводимой энергии (напряжения, тока, частоты и фазы электрического тока, давления рабочей среды и т. п.), то те же исполнительные механизмы называют параметрическими. Например, в автоматическом термостате исполнительным механизмом является усилитель, нагрузкой которого служит нагревательный элемент (регулирующий орган) термостата. При отклонениях температуры от заданного значения изменяется входное напряжение усилителя, при этом изменится и выходное напряжение, а также ток в нагревательном элементе и температура в термостате. В этом устройстве усилитель совмещает функции элемента усиления и исполнительного механизма.
В зависимости от вида потребляемой энергии различают электрические, гидравлические, пневматические и механические исполнительные механизмы. Наибольшее распространение в системах автоматики получили электрические механизмы.
В зависимости ог характера движения выходного вала исполнительные механизмы делят на три вида: с линейным, поворотным (угол поворота меньше 360°) и вращательным (угол поворота больше 360°) движением.
Регулирующим органом называется устройство (блок исполнительного устройства), которое изменяет расход энергии или вещества и непосредственно влияет на регулируемую величину объекта регулирования. Так, например, с помощью регулирующих органов можно изменять количество хладоносителя, подаваемого в теплообменник холодильной машины, или устанавливать напряжение и силу электрического тока на нагревательных элементах термической печи.
По принципу регулирующего воздействия на объект различают дросселирующие и дозирующие регулирующие органы. Первые представляют собой переменное гидравлическое сопротивление. За счёт изменения проходного сечения дросселирующего устройства регулируется расход вещества. Ко вторым относятся устройства или механизмы, которые регулируют поступление вещества или энергии путем изменения своей производительности.
Наиболее широкое распространение получили дросселирующие регулирующие органы, хотя дозирующие более экономичны.
-
ЗАДАЮЩИЕ УСТРОЙСТВА
Большинство задающих устройств состоит из трех основных элементов: привода, носителя программы и элемента настройки. В зависимости от конструктивного оформления устройства отдельные элементы могут быть функционально совмещены.
Наиболее распространенными приводами задающих устройств непрерывного действия являются синхронные электрические двигатели и часовые механизмы. В качестве носителей программы в задающих устройствах непрерывного действия обычно испольч зуют механические устройства, рычажные механизмы и функциональные потенциометры.
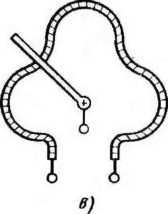
Механическими носителями программы в задающих устройствах непрерывного действия являются кулачковые механизмы различной конструкции. Назначение кулачковых механизмов состоит в преобразовании вращательного движения кулачка или прямолинейного движения кулачковой линейки в качательное или прямолинейное движение щупа толкателя. С точки зрения обеспечения постоянного контакта кулачка со щупом кулачковые механизмы делят на устройства с силовым замыканием, т. е. открытые (рис. 36, а и г), и устройства с кинематическим замыканием (с канавкой), которые называются закрытыми (рис. 36, бив).
Кулачки с силовым замыканием проще в изготовлении и обеспечивают большую точность. Закрытые кулачки целесообразно применять при малой мощности привода, так как из-за отсутствия натяжения пружины уменьшается момент сопротивления. Применение закрытых кулачков целесообразно также при больших
а) б)
Рис. 36. Типы кулачков:
цилиндрический
закрытый; г
перемещениях щупов. Выбор между плоскими и цилиндрическими кулачками определяется только конструктивными соображениями, связанными с общей компоновкой задающего устройства.
Кроме кулачковых механизмов, в качестве механических носителей заданной функции применяют рычажные механизмы, отношение плеч которых используется, например, для установления заданного соотношения расходов в струйном гидравлическом регуляторе.
В электрических программных и следящих регуляторах носители программ, как правило, выполняют в виде функциональных потенциометров.
По способу реализации заданной функции потенциометры подразделяют на профильные, ступенчатые (частный случай профильных), с некруглым винтовым каркасом, с переменным шагом намотки, с секциями, выполненными из провода различного сечения, с дополнительными постоянными резисторами, шунтирующие обмотку, имеющую отводы (рис. 37, а—е).
В зависимости от угла поворота движка потенциометры разделяются на три вида: с углом вращения движка менее 360°;

![]()
а — профильный; б — ступенчатый; в — с иекруглым каркасом; г — с переменным шагом намотки; д — с секциями, выполненными из провода различного сечеиия; е — с шунтирующими резисторами
Рис. 37. Функциональные потенциометры:
с углом вращения движка более 360°; с неограниченным углом вращения движка.
Сечение каркаса может быть круглым или плоским (с большим отношением высоты к толщине).
В задающих устройствах по соображениям простоты изготовления, возможности получения необходимой точности и взаимозаменяемости наибольшее распространение получили профильные потенциометры с плоскими каркасами и посекционношунтирован- ные потенциометры с отводами обмотки, выполненной на круглых каркасах.
Погрешность воспроизведения сложных функций для рассмотренных профильных и ступенчатых потенциометров достигает ±2 %.
Всем рассмотренным задающим устройствам непрерывного действия присущи общие недостатки: невозможность изменения программы без выключения регулятора; ограниченное быстродействие; точность задания программы определяется как точностью изготовления деталей, так и точностью их сборки. Перечисленные недостатки отсутствуют у задающих устройств дискретного действия, поэтому они получают в настоящее время все большее распространение.
В качестве привода сменных носителей программ в дискретных задающих устройствах применяют шаговые двигатели различных видов.
Все носители программ дискретных задающих устройств могут быть условно разделены на две категории: сменные и постоянные. К первой категории относятся перфокарты, перфоленты, ленты с нанесенными оптическими метками (использующие как неравномерную прозрачность, так и неравномерную отражательную способность), магнитные ленты и диски (однако два последних носителя при смене не заменяются; стирание старой программы и запись новой равноценны замене). Вторую категорию составляют «схемные» носители программы, представляющие собой многоцепные переключатели, элементы которых связаны между собой в соответствии с заданным алгоритмом функционирования.
Перфокарты изготовляют из плотной бумаги, а перфоленты — из такой же бумаги или лавсана. На перфокарте или перфоленте пробиваются отверстия, совокупность которых составляет код программы. Если цикл программы повторяется, то перфолента может быть свернута в кольцо. Для считывания сигналов с перфокарты или перфоленты используют контактные щетки или фотоэлементы.
Оптические носители (кинолента, бумажная или лавсановая лента) выполняют аналогичные функции, что и перфолента, но считывание с них осуществляется только с помощью различных фотоэлементов. Разрешающая способность оптических носителей в основном определяемая качеством оптической системы, достигает 5—10 знаков на 1 мм длины.
Магнитные носители программы, широко используемые в цифровых ЭВМ, находят неограниченное применение в дискретных задающих устройствах промышленных станков с числовым программным управлением, где они заняли преобладающее место.
В качестве постоянных носителей программы находят широкое применение многоцепные переключатели различного вида, в качестве которых используют шаговые искатели, многоцепные реле времени, переключающие бесконтактные устройства и др.
-
ЭЛЕКТРИЧЕСКИЕ ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Электрические исполнительные механизмы в зависимости от типа принципа действия делят на электромагнитные и электродвигательные.
Электромагнитные исполнительные механизмы являются наиболее простыми, надежными и быстродействующими из электрических исполнительных механизмов. Их используют для управления различного рода регулирующими и затворными клапанами, вентилями, золотниками и т. п. По виду движения исполнительного (регулирующего) органа (шток, выходной вал) электромагнитные механизмы подразделяют на электромагниты с прямолинейным движением и электромагнитные муфты с вращательным движением.
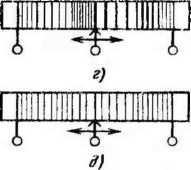
В. зависимости от требований электромагниты могут отличаться друг от друга конструктивно. Однако они имеют общие элементы (рис. 38): катушку 2, подвижный сердечник 3, возвратную пружину 1. С помощью подвижного сердечника энергия магнитного поля преобразуется в механическую и через шток 4 передается запирающему элементу. Перемещение сердечника, при котором происходит движение запирающего элемента, называют рабочим ходом 6.
 По
характеру движения сердечника и
связанного с ним регулирующего органа
электромагнитные механизмы подразделяют
на тянущие, толкающие, поворотные,
удерживающие и реверсивные.
По
характеру движения сердечника и
связанного с ним регулирующего органа
электромагнитные механизмы подразделяют
на тянущие, толкающие, поворотные,
удерживающие и реверсивные.
В тянущих механизмах линейное перемещение сердечника направлено от точки приложения противодействующих сил, а в толкающих — наоборот. В поворотных электромагнитных механизмах при подаче напряжения на обмотку катушки силовой элемент поворачивается на определенный угол. Применение поворотных механизмов ограничивается вследствие малых крутящих моментов и громоздкости конструкции.
Реверсивные электромагнитные механизмы обеспечивают изменение'"перемещения силового элемента в зависимости от характера электрического сигнала. Реверсивный механизм обычно содержит два электромагнита, сердечники которых механически связаны с запирающим элементом.
По количеству позиций выходного силового элемента (регулирующего органа) различают одно-, двух- и трехпозиционные электромагнитные механизмы. У однопозиционных механизмов при подаче тока на обмотку катушки сердечник занимает одно определенное положение. У двухпозиционных механизмов силовой элемент занимает одно из двух положений в зависимости от того, на обмотку какого электромагнита подается электрический ток. После обесточивания он сохраняет занятое им положение. Выходной силовой элемент трехпозиционных электромагнитных механизмов при отсутствии тока в обмотках занимает нейтральное положение.
В зависимости от вида питающего напряжения электромагнитные механизмы могут быть переменного и постоянного тока, а также со сменными катушками переменного и постоянного токов с унифицированным магнитопроводом.
В настоящее время получили широкое распространение электромагнитные приборы серии ЭВ. Приводы ЭВ-1 и ЭВ-2 рассчитаны на длительный режим работы, а привод ЭВ-3 рассчитан на кратковременный режим работы (в течение 1 мин) при усилии 100 Н.
В термических и литейных цехах исполнительные механизмы с электромагнитным приводом используют в регуляторах температуры в топливных печах, давления и расхода сжатого воздуха в формовочных машинах.
Электромагнитные муфты являются связующим звеном между приводом и регулирующим органом. Электромагнитные муфты обладают высоким быстродействием, плавным пуском и регулированием скорости, просты в управлении и имеют мощность от нескольких ватт до сотен киловатт.
По принципу действия электромагнитные муфты разделяют на фрикционные и порошковые муфты и муфты скольжения.
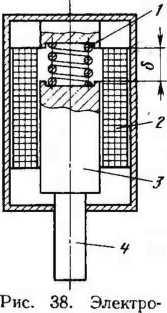
Фрикционная муфта (рис 39) состоит из двух полумуфт: ведущей 1 и ведомой 6, посаженных на валы 3 и Р. В корпусе ведущей полумуфты имеется обмотка 5, питаемая электрическим током через кольца 4 и щетки 2. При подаче постоянного электрического тока на обмотку возникает магнитный поток, который притягивает по шлицам 8 к себе ведомую полумуфту. Последняя, преодолевая усилие пружины 7, притягивается к ведомой полу- муфте. Силы трения между полумуфтами позволяют передать крутящий момент с ведущего вала на ведомый. При выключении тока магнитное поле исчезает, и пружины 7 разъединяют полумуфты друг от друга, прерывая тем самым вращение вала 9. Однодисковые муфты не позволяют передавать большие крутящие моменты. Для этого используют многодисковые муфты, имеющие большое число поверхностей трения.
г
г
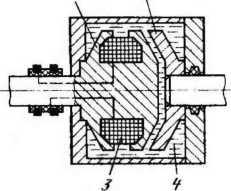
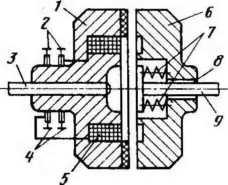 Рис.
39. Электромагнитная фрикцион- Рис. 40.
Электромагнитная порошко-
Рис.
39. Электромагнитная фрикцион- Рис. 40.
Электромагнитная порошко-
иая муфта вая муфта
Порошковые муфты (ферропорошковые или магнитоэмульсионные) работают по принципу намагничивания ферромагнитной среды, заполняющей пространство между полумуфтами 1 и 2 (рис. 40). Ферромагнитная среда 4 представляет собой обычно смесь порошка карбонильного или кремнистого железа и смазывающего вещества (тальк, графит, масло), улучшающего проскальзывание полумуфт при холостом ходе и уменьшающего истирание ферропорошка. При подаче тока в обмотку 3 ведущей пол у муфты 1 возникает магнитное поле, намагничивающее отдельные частички железного порошка, которые слипаются между собой, увеличивая вязкость ферромагнитной среды. Ведомая полумуфта 2 начинает вращаться, передавая вращение на объект управления. Вязкость ферромагнитной среды зависит от силы тока в обмотке, следовательно, можно при росте тока увеличивать передаваемый крутящий момент. Таким образом, муфты вязкого трения являются управляемыми, т. е. позволяют плавно регулировать вращающий передаваемый момент, а следовательно, и частоту вращения ведомого вала.
і
Рис.
41. Электромагнитная муфта скольжения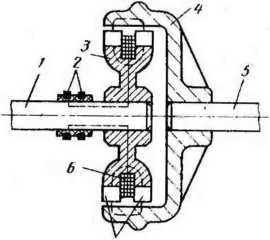
Промышленность выпускает муфты- для механизмов малых мощностей типа ПМС с номинальным моментом 1,7 ... 30 Н-м. Для механизмов большей мощности выпускают муфты серии ИМС с номинальными моментами 70 ... 1600 Н-м.
Электродвигательный механизм состоит из исполнительного двигателя редуктора и тормоза. Сйгнал управления одновременно подается на двигатель и тормоз, при этом тормоз растормаживается и двигатель приводит в движение регулирующий орган. При снятии сигнала двигатель выключается, а тормоз останавливает движение регулирующего органа.
Исполнительными двигателями называют управляемые двигатели малой мощности, которые предназначены для преобразования электрического сигнала в механическое вращение вала.
Как правило, исполнительные двигатели имеют две обмотки: возбуждения и управления. Исключение составляют двигатели с постоянными магнитами. Обмотки возбуждения постоянно находятся под напряжением, а на обмотку управления сигнал подается лишь тогда, когда необходимо получить вращение вала. Так как исполнительные двигатели работают в схемах управления, то для них в основном характерны пуски, остановки или реверсии. Время их вращения обычно невелико, поэтому эти двигатели никогда не снабжаются вентиляторами. В цепях сопряжения переходных процессов исполнительные двигатели стремятся выполнить малоинерционными и малогабаритными. В настоящее время в качестве исполнительных двигателей используют двухфазные асинхронные, синхронные шаговые двигатели и двигатели постоянного тока.
Типы электродвигателей, их устройство и схемы выключения изучаются в курсе «Общая электротехника» и поэтому здесь не рассматриваются.
-
ГИДРАВЛИЧЕСКИЕ И ПНЕВМАТИЧЕСКИЕ
ИСПОЛНИТЕЛЬНЫЕ МЕХАНИЗМЫ
Гидравлические и пневматические исполнительные двигатели преобразуют энергию рабочей среды, находящейся под давлением, в механическую энергию поступательного или вращательного движения.
В качестве рабочей среды в гидродвигателях чаще всего используется минеральное масло, сохраняющее свои свойства при воздействии на него высокого давления. В пневмодвигателях рабочей средой служит сжатый воздух./ г
т
,7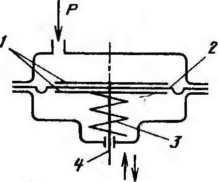
\р,
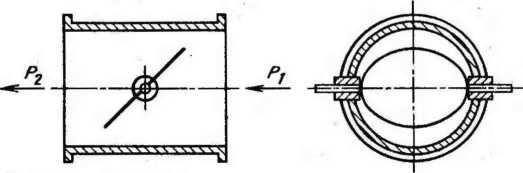
Рис. 42. Мембранный исполнительный Рис. 43. Поршневой исполнительный механизм ‘механизм
В устройствах автоматического управления гидро- и пневмо- двигатели используют значительно реже, чем электрические. Однако в ряде случаев они оказываются единственно приемлемыми в техническом отношении.
Гидро- и пневмодвигатели способны развивать очень большие усилия (0,03 ... 0,3 МН) при малых габаритных размерах. По этим параметрам они превосходят все остальные двигатели. Они просты по конструкции, надежно работают и не нуждаются в редукторах для согласования с регулирующим органом. Гидравлические и пневматические двигатели имеют одинаковый принцип действия, их различие лишь в быстродействии.
Различают две основные разновидности гидро- й пневмодвигателей: с поступательным движением (мембранные и поршневые) и с вращательным движением (шестеренчатые, лопастные, плунжерные и турбинные).
В мембранном исполнительном механизме (рис. 42) перемещение выходного штока 4 осуществляется силой, создаваемой давлением.рабочей среды на мембрану 2. При этом возвратная пружина 3 сжимается. Чем больше диаметр мембраны, тем большее усилие может быть передано на регулирующий орган. Полость под мембраной соединена с атмосферой. При снятии давления мембрана и, следовательно, шток возвращаются возвратной пружиной в исходное положение. Диски 1 обеспечивают жесткость мембраны, изготовленной из прорезиненной ткани.
Значительно реже применяют поршневые исполнительные механизмы. Их используют в тех случаях, когда шток необходимо перемещать на расстояние более 300 мм.
В цилиндре 1 исполнительного механизма (рис. 43) перемещается поршень 2 со штоком 3. Поршень будет неподвижен при равенстве давлений Рг и Р2. Если давление в левой полости больше, то на поршень будет действовать сила, равная разности давлений Рг и Р2, умноженной на площадь поверхности поршня. Под действием этой силы поршень начнет перемещаться вправо. Шток 3 проходит через уплотнительный сальник 4.
Рис.
44. Регулирующая заслонка
золотники, устройства типа сопло-заслонка или струйные трубки. При объемном управлении в качестве источников энергии используют насосы или компрессоры переменной производительности.
Гидро- и пневмодвигатели применяют в устройствах привода автоматических манипуляторов и исполнительных механизмов, дозаторов, затворов и питателей, предназначенных для регулирования расходов формовочных и других сыпучих и пусковых материалов.
б. РЕГУЛИРУЮЩИЕ ОРГАНЫ
Для непрерывного регулирования в запорно-регулиру- ющих устройствах применяют дросселирующие регулирующие органы следующих типов: заслонки, клапаны, краны, шиберы и направляющие аппараты. '
В заслонках (рис. 44) изменение пропускной способности достигается поворотом заслонки (диска) в седле. Они просты по конструкции и имеют удовлетворительные регулировочные свойства. Заслонки можно устанавливать на вертикальных и горизонтальных участках трубопроводов. Они получили широкое распространение в литейных и термических цехах для регулирования потоков газа и воздуха в трубопроводе с избыточным давлением до 0,25 МПа.
Клапаны применяют для регулирования расходов газа, воздуха или пара при давлении до 20 МПа. В зависимости от числа положений их подразделяют на двух- и трехходовые.
В зависимости от положения запирающего элемента при обесточенной катушке двухходовые клапаны делят на нормально закрытые (рис. 45, а) и нормально открытые (рис. 45, б). В нормально закрытом клапане при отсутствии тока проходной канал закрыт, а в нормально открытом — открыт. Тяговое усилие большинства электромагнитов резко уменьшается с увеличением хода сердечника, что вызывает увеличение габаритных размеров и потребляемой мощности. Поэтому в клапанах с электромагнитными механизмами применяют уравновешивающие запирающие элементы (рис. 45, в) и встроенные усилители (рис. 45, г).
В соответствии с типом дроссельного органа клапаны делят на золотниковые, диафрагмовые и шланговые.
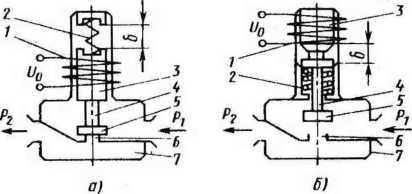
Рис.
45. Схемы золотниковых клапанов с
электромагнитным механизмом: с
— нормально закрытый; б
—
нормально открытый; в
— с уравновешивающим запирающим
элементом; г
— со встроенным усилителем; д
и е
— распределительных; 1
— обмотка; 2
—
возвратная пружина; 3
— сердечник; 4
— шток; 5
— запирающий элемент; 6
— седло; 7 — корпус

Золотниковые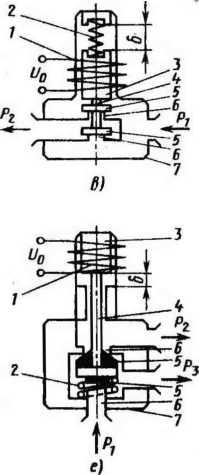 клапаны бывают односедельные (рис. 45, а
и б), двухседельные (рис. 45, в)
и многоседельные. Запорные элементы
всех клапанов выполняют либо в форме
тарелки (рис. 45, а—в),
либо с конической (рис. 45, г)
или шаровой поверхностью.
клапаны бывают односедельные (рис. 45, а
и б), двухседельные (рис. 45, в)
и многоседельные. Запорные элементы
всех клапанов выполняют либо в форме
тарелки (рис. 45, а—в),
либо с конической (рис. 45, г)
или шаровой поверхностью.
Трехходовые (распределительные) клапаны имеют три присоединительных прохода, через которые два потока соединяются в один (рис. 45, 5) или один поток разделяется на два (рис. 45, е).
Краны являются простейшими регулирующими органами, которые применяют для регулирования расхода потока в трубопроводах небольшого сечения. Наиболее распространенной является конструкция крана с пробкой в виде усеченного конуса, притертого к корпусу. В пробке имеется отверстие круглой, овальной или прямоугольной формы, сквозь которое протекает регулируемая среда. Поворотом пробки регулируется расход жидкости, протекающей по трубопроводу.
Шиберы устанавливают в дымоходах топливных плавильных и термических печей. Они предназначены для регулирования давления в рабочем пространстве печи.
При изменении входной скорости газа или воздуха дымососов и вентиляторов изменяются их производительность и напор. На этом свойстве основано устройство регулирующего органа на базе направляющего аппарата. Регулирующий орган, выполненный в виде направляющего аппарата, практически безынерционен и более экономичен, чем регулирующий орган, использующий дросселирование потока.
Дозирующие исполнительные органы подразделяют на две группы: механические и электрические. К первой группе относятся плужковые сбрасыватели, дозаторы, питатели, насосы, компрессоры. Во вторую группу входят реостатные и автотрансформаторные регулирующие органы.
Плужковые сбрасыватели широко применяют в литейных цехах для регулирования уровня различных формовочных материалов в бункерах бегунов, формовочных и стержневых машин. Плужки выполняют в виде лемеха плуга или другого скребкового устройства и устанавливают над ленточным транспортером с движущимся сыпучим материалом. Плужок может занимать два положения: на ленте или над ней.
Дозаторы представляют механизмы, предназначенные для выдачи потока материала с обеспечением требуемого значения расхода.
Практически для всех сыпучих материалов, кроме порошкообразных, могут применяться одни и те же дозаторы. Для порошковых материалов используют дозаторы, исключающие самопроизвольное движение материала.
Дозаторы непрерывного действия различают по способу регулирования производительности, типу систем автоматического регулирования, характеристики дозируемого материала и конструктивным признакам.

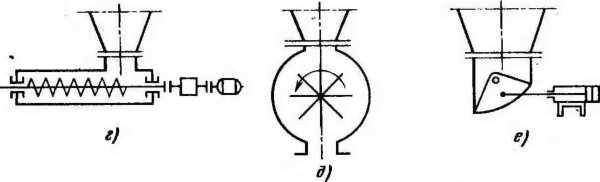
Рис. 46. Схемы рабочих органов дозаторов:
а — ленточный питатель; б — вибропитатель; в — тарельчатый питатель; г — шнековый питатель; д — секторный питатель; е — гравитационный питатель
В зависимости от способа регулирования производительности все дозаторы делят на механизмы с автоматическим регулированием и без автоматического регулирования.
В связи с большим разнообразием физико-химических свойств дозируемых материалов и условий, в которых работают дозаторы, разработаны различные конструкции рабочих (регулирующих) органов дозаторов, основные типы которых показаны на рис. 46, а—е.
Контрольные вопросы и задания
-
Расскажите о классификации задающих устройств.
-
Расскажите о классификации исполнительных механизмов.
-
Расскажите о классификации регулирующих органов.
-
Как устроены и работают механические задающие устройства?
-
Каково назначение задающих устройств, выполненных в виде функциональных потенциометров?
-
Как устроены и работают дискретные задающие устройства?
-
Какие электромагнитные исполнительные механизмы применяют в системах автоматики?
-
Какие электрические муфты применяют в системах автоматики?
-
Назовите электродвигательные исполнительные механизмы.
-
Как устроены и работают гидравлические и пневматические исполнительные механизмы?
-
Как устроены и работают дросселирующие регулирующие органы?
-
Как устроены и работают дозирующие исполнительные органы?
РАЗДЕЛ И
КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНЫЕ ПРИБОРЫ И ТЕХНИКА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ