

3.6 Управление мощностью и программирование подачи топлива (cfm56-7b)
При управлении мощностью контролируется уровень тяги двигателя на основании входных сигналов РУДа (рис. 20). В качестве параметра тяги используется частота вращения ротора вентилятора. Электронный регулятор рассчитывает пять опорных значений частоты вращения ротора вентилятора (соответствующей малому газу, максимальному взлетному, максимальному непрерывному, максимальному повышенному взлетному режимам и максимальному реверсу) для соответствующих параметров двигателя (задаваемых заглушкой входных данных) на основании параметров наружного воздуха и состояние системы перепуска воздуха в двигателе.
3.6.1 РУД
Узел РУД механически соединен с датчиком положения с помощью регулируемой тяги. Датчик положения преобразует механическое перемещение в электрический сигнал, эквивалентный угловому положению. Электрический сигнал передается через проводку в электронный регулятор для расчета тяги.
РУД перемещается либо пилотами, либо автоматически системой автопилотирования. Управляющий сигнал частоты вращения ротора вентилятора рассчитывается исходя из углового положения РУД и других параметров.
3.6.2 Условия окружающей среды
При управлении мощностью используются следующие параметры окружающей среды: давление (Ps/Po), полное давление (Р1) и полная температура воздуха (ТАТ/Т12). Каждый канал электронного регулятора имеет независимые источники данных. К ним относятся:
- Статическое давление, как входной сигнал Р0 от двигателя или входной сигнал PS из системы выработки сигналов о полном и статическом давлениях полета;
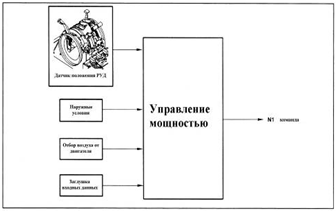
Рис. 20. Управление мощностью G.E./Snecma CFM56-7B [4]
- Полное давление, как входной сигнал из системы выработки сигналов о полном и статическом давлениях полета;
- Полная температура, как входной сигнал Т12 от двигателя или входной сигнал из системы выработки сигналов о полном и статическом давлениях полета.
3.6.3 Система отбор воздуха из компрессора
Отбор воздуха из компрессора используется для снабжения горячим воздухом противообледенительной системы гондол двигателей и крыла, а также для снабжения воздухом под высоким давлением системы жизнеобеспечения самолета. Каждый двигатель обеспечивает воздухом собственную противообледенительную систему входного обтекателя. Электронный регулятор управляет отбором воздуха из компрессора, объединяя нужды двигателя и самолета с требованиями к величине тяги и соответствующими ограничениями двигателя.
3.6.4 Рабочие режимы управления тягой
Двигатель CFM56-7B имеет 3 рабочих режима управления тягой: один нормальный режим управления и два чередующихся, которые обеспечивают устранение отказа при потере данных о полном давлении из системы выработки сигналов о полном и статическом давлениях полета.
При потере связи электронного регулятора с системой выработки сигналов о полном и статическом давлениях полета, данных о полном давлении, нагреве приемника полного давления или рассогласовании между данными, приходящими от 1 и 2 систем выработки сигналов о полном и статическом давлениях полета, электронный регулятор включается во временный гибкий режим. В данном режиме регулятор более не рассчитывает число М по данным о полном давлении, приходящим от одностороннего действующего источника. Число М рассчитывается из последнего действительного приращения температуры МСА и внешнего статического давления набегающего потока. Т.к. оба двигателя получают одни и те же данные, они одновременно включаются во временный гибкий режим. Только в случае отказа шины данных одного из двигателей возможен односторонний переход другого во временный гибкий режим.
Электронный регулятор автоматически переходит из временного гибкого во временный устойчивый режим, если РУД позиционирован ниже максимального взлетного режима. Временный устойчивый режим может быть выбран вручную при помощи переключателя электронного регулятора на верхней приборной панели. В данном режиме регулятор рассчитывает число М из фиксированной полной температуры воздуха (30°С) и статического наружного давления.
Во временном устойчивом режиме данные о максимальной частоте вращения ротора вентилятора, обеспечиваемые регулятором, больше по значению либо равны частоте вращения ротора вентилятора на максимальном режиме работы двигателя в нормальных условиях. В условиях повышенной температуры наружного воздуха является возможным существенное превышение ограничений двигателя.
3.6.5 Автопилот
Комплексная система автопилотирования (рис. 21) обеспечивает автоматическое позиционирование РУДа во время всех фаз полета. Система состоит из следующих компонентов:
- компьютера управления полетом со вторым компьютером управления в качестве дополнительной опции;
- цифровой системы управления полетом;
- компьютера автопилотирования;
- двух сервосистем автопилотирования.
Компьютер управления полетом задает компьютеру автопилотирования режимы работы двигателя с установленной частотой вращения ротора вентилятора или установленную воздушную скорость. В качестве альтернативы цифровая система управления полетом может устанавливать воздушную скорость компьютеру автопилотирования. Когда задействован автопилот, компьютер автопилотирования позиционирует РУДы обоих двигателей при помощи двух сервосистем для достижения определенного режима работы двигателя с установленной частотой вращения ротора вентилятора или установленной воздушной скорости.
И компьютер управления полетом, и электронный регулятор рассчитывают тягу, используя данные системы выработки сигналов о полном и статическом давлениях полета. Но, в отличие от электронного регулятора, компьютер управления полетом может использовать параметры только от одной системы выработки сигналов о полном и статическом давлениях полета. Это означает, если регулятор теряет параметр системы выработки сигналов о полном и статическом давлениях полета, он переходит во временный режим, но компьютер управления полетом все еще способен рассчитывать правильную тягу.