

3.5 Электронная система программирования подачи топлива
Системы дозировки топлива с электронными функциями в прошлом не применялись так широко, как гидромеханические и гидропневматические. В последние годы на большинстве новых двигателей, разработанных для коммерческой и бизнес авиации, устанавливаются электронные регуляторы. Электронный регулятор представляет собой гидромеханическое устройство с дополнительным включением электронных датчиков. Электронные схемы запитаны от шины самолета или от собственного специализированного генератора переменного тока, они анализируют рабочие параметры двигателя, такие как температура выхлопных газов, давление по тракту, частоту вращения ротора двигателя. В соответствии с этими параметрами электронная часть системы точно рассчитывает необходимый расход топлива.
3.5.1 Пример системы (Rolls Royce RB-211)
RB-211 – это трехкаскадный ТРДД больших размеров. Он имеет управляющий электронный регулятор, входящий в гидромеханическую систему программирования подачи топлива. Усилитель блока электронного регулятора защищает двигатель от заброса температуры при работе двигателя на взлетном режиме. В любых других условиях работы топливный регулятор работает только на гидромеханическую систему.
Из анализа рис. 14 видно, что усилитель регулятора получает сигналы на входе из ТНД и двух частот вращения компрессоров НД и ВД.
Регулятор работает по гидромеханической программе подачи топлива пока мощность двигателя не приблизится к максимальной, тогда усилитель электронного регулятора начинает функционировать как ограничитель подачи топлива.
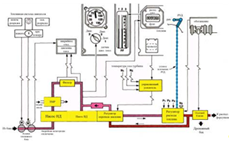
Рис. 14. Топливная система с электронным регулятором, управляющим программой подачи топлива[4]
Регулятор перепада давлений в данной системе выполняет функции редукционного клапана в упрощенной схеме гидромеханического регулятора подачи топлива на рис. 10, Когда мощность двигателя приближается к максимальной и заданные температура газа в турбине и частота вращения вала компрессора достигнуты, регулятор перепада давлений уменьшает расход топлива в топливные форсунки, топливо на вход насоса. Регулятор подачи топлива в данной системе действует как гидромеханическое устройство, получая сигналы о частоте вращения ротора КВД, давления по тракту (Р1, Р2, Р3) и позиции РУДа.
Как следует из рис. 14, топливный регулятор получает от двигателя следующие сигналы для создания программы подачи топлива:
- угла установки РУДа;
- р1 – полного давления на входе в компрессор (вентилятор);
- р3 – полного давления на выходе из компрессора второго каскада (промежуточного компрессора);
- р4 – полного давления на выходе из КВД;
- N3 – частоты вращения ротора КВД;
- N1 – частоты вращения ротора КНД (вентилятора);
- N2 - частоты вращения ротора промежуточного компрессора;
- температуры газа в турбине (на выходе из ТНД);
- команды блокировки функций усилителя регулятора;
- обогащения – увеличитель подачи топлива используется для запуска двигателя при наружной температуре ниже 0°.
3.5.2 Пример системы (Garrett TFE-731And ATF-3)
Garrett TFE-731 и ATF-3 – это турбовентиляторные двигатели нового поколения для бизнес авиации. На них установлены блоки системы электронного управления, полностью контролирующие программу подачи топлива.
Согласно схеме на рис. 15 электронный компьютер получает следующие входные сигналы:
- N1 – частота вращения вентилятора;
- N2 – частота вращения ротора промежуточного компрессора:
- N3 – частота вращения ротора компрессора высокого давления;
- Тt2 – полная температура на входе в двигателя;
- Тt8 - температура на входе ТВД;
- рt2 – полное давление на входе;
- входная мощность – 28 В постоянного тока;
- генератор переменного тока на постоянных магнитах;
- угол установки РУДа;
- положение ВНА;
- Рs6 – статическое давление на выходе ТВД.
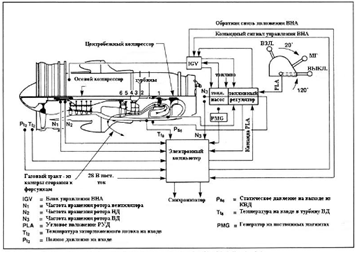
Рис. 15. Электронный регулятор топливной системы с полным контролем программы подачи топлива[4]
Электронная часть топливного регулятора анализирует входные данные и посылает команды на установку ВНА и программирует подачу топлива гидромеханической частью топливного регулятора.
Производители заявляют, что эта система полностью и более точно контролирует программу подачи топлива, чем сравнимая гидромеханическая система. Она также предохраняет двигатель на всем протяжении от запуска до взлетного режима от заброса температуры и оборотов, срыва потока при резком разгоне при помощи постоянного мониторинга температуры на входе ТВД и других важных параметров двигателя.
3.5.3 Пример системы (G.E./Snecma CFM56-7B)
Двигатель CFM56-7B (рис. 16) работает с помощью системы, известной как FADEC (Full Authority Digital Engine Control). Она осуществляет полный контроль над системами двигателя в ответ на входные команды от систем самолета. FADEC также снабжает информацией самолетные системы для индикации в кабине экипажа, мониторинга состояния двигателя, отчетности о ТО и поиска неисправностей.
Система FADEC выполняет следующие функции:
- осуществляет программирование подачи топлива и защиту от превышения предельных параметров роторами НД и ВД;
- контролирует параметры двигателя во время цикла запуска и предотвращает превышение предельной температуры газа в турбине;
- управляет тягой в соответствии с двумя режимами: ручным и автоматическим;
- обеспечивает оптимальную работу двигателя, управляя потоком компрессора и зазорами турбины;
- управляет двумя блокировочными электромагнитами РУДа.
Элементы системы FADEC. Система FADEC состоит из:
- электронного регулятора, включающего два идентичных компьютера, названных каналы А и В. Электронный регулятор осуществляет управляющие расчеты и отслеживает состояние двигателя;
- гидромеханического блока, который преобразует электрические сигналы от электронного регулятора в давление на приводы клапанов и исполнительных механизмов двигателя;
- периферийных компонентов таких, как клапана, силовые приводы и датчики для управления и мониторинга.
Интерфейс самолет/электронный регулятор (рис. 16). Системы самолета снабжают электронный регулятор информацией о тяге двигателя, управляющих командах, о состоянии и условиях полета ВС, как описано ниже:
- Информация о положении РУДа поступает в электронный регулятор в виде электрического сигнала угла рассогласования. К РУДам в кабине экипажа механически присоединен двойной преобразователь.
- Полетная информация, целевые команды для двигателя и данные передаются каждому двигателю от электронного блока отображения самолета по шине ARINC-429.
- Выборочные дискретные сигналы самолета и информационные сигналы через проводку подаются в электронный регулятор.
- Сигналы о положении реверса двигателя по проводам передаются в электронный регулятор.
Электронный регулятор использует дискретную информацию об отборе воздуха и полетной конфигурации (земля/полет и положение закрылков) от самолета для компенсации режима работы и в качестве базы для программирования подачи топлива при разгоне.
FADEC интерфейсы.Система FADEC – это система со встроенным тестовым оборудованием. Это означает, что она способна обнаружить собственную внутреннюю или внешнюю неисправность. Для выполнения всех своих функций система FADEC соединена с самолетными компьютерами через электронный регулятор.
Электронный регулятор получает команды от блока отображения самолета общей системы отображения информации, который является интерфейсом между электронным регулятором и самолетными системами. Оба блока системы отображения обеспечивают передачу следующих данных от системы выработки сигналов о полном и статическом давлении в полете и компьютера управления полетом:
- Параметры воздуха (высота, полная температура воздуха, полное давление и М) для расчета тяги;
Угловое положение РУД.
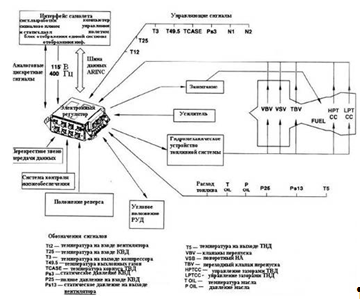
Рис. 16. Схема топливной системы двигателя G.E./Snecma CFM56-7 [4]
Конструкция FADEC. Система FADEC является полностью резервированной, построенной на двухканальном электронном регуляторе. Клапаны и исполнительные механизмы снабжены сдвоенными датчиками для обеспечения обратной связи с регулятором. Все контролируемые входные сигналы являются двухсторонними, но некоторые параметры, используемые для мониторинга и индикации, являются односторонними.
Для повышения надежности системы все входные сигналы для одного канала передаются и на другой через перекрестное звено передачи данных. Это обеспечивает работоспособность обоих каналов даже если важные входные сигналы для одного из каналов повреждены.
Оба канала А и В идентичны и постоянно функционируют, но независимо друг от друга. Оба канала всегда получают входные сигналы и обрабатывают их, но только один канал называемый активным управление, и формирует управляющие сигналы. Другой канал является дублирующим.
При подаче напряжения на электронный регулятор во время работы происходит выбор активного и дублирующего канала. Система встроенного тестового оборудования определяет и изолирует отказы или комбинации отказов для поддержания исправности каналов и для передачи данных об обслуживании самолетным системам. Выбор активного и дублирующего каналов основывается на исправности каналов, каждый канал устанавливает собственный статус исправности. Самый исправный выбирается в качестве активного.
Когда оба канала имеют одинаковый статус исправности, выбор активного и дублирующего канала чередуется при каждом запуске двигателя при превышении частоты вращения ротора низкого давления более 10,990 об/мин. Если канал поврежден, и активный канал не способен выполнять функции управления двигателем, система переходит в отказоустойчивый режим, защищающий двигатель.
Работа регулятора с обратной связью. Для полного управления различными системами двигателя электронный регулятор использует управление с обратной связью. Регулятор рассчитывает положение для элементов системы, называемое команда. Затем регулятор выполняет операцию сравнения команды с действительным положением элемента, называемую обратная связь, и рассчитывает разницу, называемую запрос.
Электронный регулятор через электрогидравлический сервоклапан гидромеханического устройства посылает сигналы элементам (клапанам, силовым приводам), вызывающие их перемещение. При перемещении клапана или силового привода системы электронный регулятор по обратной связи получает сигнал о положении элемента. Процесс повторятся, пока не прекратится изменение положения элементов.
Входные параметры. Все датчики являются сдвоенными кроме Т49.5 (температура выхлопных газов), Т5 (температура на выходе турбины НД), Рs15 (статическое давление на выходе вентилятора), Р25 (полная температура на входе КВД) и WF (расход топлива). Датчики Т5, Рs15 и Р25 являются дополнительными и не устанавливаются на каждом двигателе.
Для выполнения расчета каждый канал электронного регулятора получает величины собственных параметров и величины параметров другого канала через перекрестное звено передачи данных. Обе группы величин проверяются на достоверность тестовой программой в каждом канале. Правильная величина выбирается для использования, в зависимости от оценки на достоверность при каждом считывании, либо используется усредненное значение обоих величин.
В случае отказа сдвоенного датчика выбирается значение величины, рассчитанное из других доступных параметров. Это применимо к следующим параметрам:
- Частота вращения ротора низкого давления (N1);
- Частота вращения ротора высокого давления (N2);
- Статическое давление на выходе компрессора (Ps3);
- Температура на входе в компрессор высокого давления (T25);
- Положение топливного дозирующего клапана (FMV);
- Положение управляемого клапана перепуска воздуха (VBV);
- Положение поворотного направляющего аппарата (VSV).
Для всех других параметров, в случае, если у электронного регулятора нет возможности выбрать действительный параметр, будет выбран аварийный параметр.
Расположение электронного регулятора (рис. 17). Электронный регулятор двухканальный компьютер, помещенный в алюминиевый блок, который закреплен на правой стороне кожуха вентилятора в положении 2 часа. Четыре установочных болта с демпферами обеспечивают защиту от ударов и вибрации.
Для безошибочной работы электронного регулятора требуется охлаждение для сохранения внутренней температуры в допустимых пределах. Окружающий воздух отбирается с помощью воздухозаборника, расположенного с правой стороны обтекателя вентилятора. Этот охлаждающий воздух направляется во внутреннюю камеру электронного регулятора вокруг отделения каналов А и В и, затем, выводится через выходное отверстие охлаждающего воздуха.
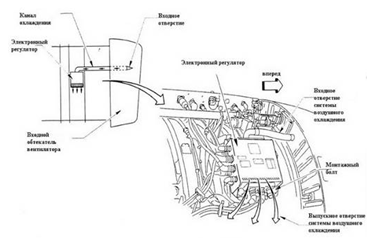
Рис. 17. Электронный регулятор двигателя G.E./Snecma CFM56-7B [4]
Перепрограммирование электронного регулятора. Каждый электронный регулятор может быть перепрограммирован с помощью переносного загрузчика данных. Он соединяется с электронным регулятором через три цилиндрических электрических разъема, затем оба агрегата запитываются, чтобы загрузить последнее программное обеспечение. После загрузки на дисплее переносного загрузчика данных может появиться одно из следующих сообщений: «Загрузка выполнена» или «Ошибка при передаче».
Заглушка распознавания номинальной характеристики двигателя (рис. 18). Заглушка распознавания номинальной характеристики двигателя обеспечивает электронный регулятор информацией о конфигурации двигателя для его правильной работы. Эта заглушка, закрепленная на корпусе вентилятора с помощью металлической планки, вставляется в один из разъемов на корпусе электронного регулятора. Заглушка остается с двигателем даже в случае замены электронного регулятора. Заглушка включает в себя кодируемую схему, припаянную к нему, которую воспринимает и использует электронный регулятор для определения величины тяги, которую сможет обеспечить двигатель.
Электронный регулятор в своем ПЗУ хранит программы для всех доступных конфигураций двигателя. Во время подготовки к работе, он снимает информацию с заглушки, считывая напряжение с нескольких перемычек. В зависимости от расположения и наличия напряжения на специальных перемычках, электронный регулятор выбирает особую программу. В случае отсутствия или недостоверности идентификационной заглушки, электронный регулятор использует параметры, сохраненные в ПЗУ при прошлой конфигурации.
Идентификационная заглушка снабжена плавкими и двухтактными перемычками. Плавкие перемычки обеспечивают электронный регулятор информацией о тяге двигателя при запуске. Они сделаны с помощью металлизации области между двумя контактами заглушки. Эти перемычки могут быть разомкнуты только прогорев, таким образом, их перенастройка невозможна.
При создании все двигатели CFM 56-7B имеют взлетную тягу, равную 27,300 фунтам. В зависимости от требований идентификационная заглушка меняет взлетную тягу двигателей на 19,500; 20,600; 22,700; 24,200 или 26,300 фунтов.
Чрезвычайный или повышенный взлетный режим (bump) – это опция, обеспечивающая достижение уровней мощности больших, чем нормальные взлетные уровни без особых ограничений. Особые параметры мощности двигателя могут быть установлены с помощью идентификационной заглушки. Паспортные данные не влияют на уровни мощности, которые могут быть равны или быть ниже значений максимальной продолжительной тяги. Для любого имеющегося чрезвычайного режима предельные значения частоты вращения роторов НД и ВД а также температуры выхлопных газов остаются равными базовой характеристике.

Рис. 18. Электронный регулятор G.E./Snecma CFM56-7B [4]
После сборки нового двигателя могут существовать небольшие различия в величине тяги при определенных частотах вращения ротора НД. Чтобы просчитать это идентификационная заглушка может содержать модификатор, который слегка изменяет скорость ротора НД и делает характеристики двигателя идентичными с тем, что называется «нормой». Даже если модификатор может вызвать снижение условной скорости вращение ротора низкого давления, индикация в кабине экипажа не покажет это уменьшение. На самолетах с двухдвигательной силовой установкой оба тахометра будут показывать одинаковые значения частоты вращения роторов обоих двигателей.
Питание электронного регулятора. Электронный регулятор обеспечивается дополнительными источниками питания, чтобы гарантировать непрерывное и отказоустойчивое электропитание. Логическая схема внутри электронного регулятора автоматически выбирает надлежащий источник питания в случае отказа. Источниками питания являются:
- Нормальная самолетная шина 115 В переменного тока, 400 Гц;
- Аварийная самолетная шина 115 В переменного тока, 400 Гц;
- Управляющий генератор переменного тока может обеспечивать питание от двух независимых обмоток на скорости ротора ВД, примерно равной 12%.
Управляющий генератор переменного тока рассматривается как основной источник питания электронного регулятора. В случае его отказа электронный регулятор автоматически переключит свое питание на самолетную электрическую сеть.
Датчики двигателя (рис. 19). Электронному регулятору необходимы информация о газовом тракте двигателя и рабочие параметры с целью управления двигателем во время всех фаз полета. Датчики установлены в аэродинамических позициях и различных точках двигателя, чтобы замерять рабочие параметры двигателя и обеспечивать ими подсистемы электронного регулятора. Датчики, расположенные на аэродинамических позициях имеют одинаковый номер позиции, например Т25. Датчики, находящиеся в различных позициях имеют различные имена, например Т – это датчик корпуса.
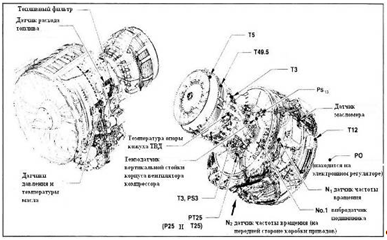
Рис. 19. Датчики двигателя G.E./Snecma CFM56-7B[4]
Следующие датчики двигателя используются электронным регулятором. Датчики частоты вращения роторов:
- Частота вращения ротора вентилятора, N1;
- Частота вращения ротора газогенератора, N2.
Датчики температуры:
- Температура на входе в вентилятор, Т12;
- Температура на входе КВД, Т25;
- Температура на выходе компрессора, Т3;
- Температура выхлопных газов, Т49.5;
- Температура на выходе ТНД, Т5;
- Температура опоры кожуха ТВД.
Датчики давления:
- Статическое наружное давление Р0;
- Статическое давление на выходе КВД, Рs3;
- Статическое давление на выходе вентилятора, Рs13;
- Полное давление на входе КВД, Р25.
Вибродатчики:
- Вибрационный тензодатчик подшипника №1;
- Тензодатчик вертикальной стойки корпуса вентилятора компрессора.