

5.1.6 Выбор элементов для блока проверки корректора высоты
Вакуумный насос:
Для создания давления 540 мбар (53 кПА), соответствующее высоте
5000м (высотность вертолета Ми-171), я выбрал мининасосы компании Microvood srl, подходящий своими габаритно-производительным характеристикам.
Благодаря своей компактности, небольшому весу, долгому сроку службы и невысокой цене мининасосы компании Microvood srl находят широкое применение в областях электротехнических систем.
Мембранные насосы-компрессоры серии M работают без применения смазок и имеют высокую производительность. Они могут использоваться либо как насосы, либо как компрессоры.
Изделие М71 BX имеет две ступени с возможностью их параллельного или последовательного подключения. В режиме насоса развивают вакуум до 25 мбар, в режиме компрессора нагнетаtт давление до 3 бар.
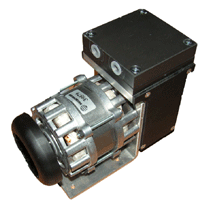
Рисунок 26 - мининасос М71 BX компании Microvood srl
Основные технические данные:
производительность.....................................................................62 л/мин;
вакуум............................................................................................100 мбар;
напряжение...........................................................................................12 В.
Габариты:
длина..............................................................................................................230 мм;
ширина...........................................................................................................153 мм;
высота..............................................................................................................94 мм.
Игольчатый клапан с цифровым управлением:
Для изменения давления в блоке проверки корректора высоты я использую игольчатый клапан с цифровым управлением. Из представленных на рынке, техническими характеристиками и способом управления, подходит SMV прецизионный двухходовой игольчатый регулирующий клапан с шаговым приводом.
Принцип действия:
Когда направление вращения соответствует положению «низкое» (LOW), то шпиндель вращается в сторону закрытия клапана. Когда направление вращения соответствует положению «высокое» (HIGH). Задается скорость работы клапана путем подачи напряжения на клемму 4 в пределах 0-5В пост. тока. Скорость вращения шпинделя и расстояние перемещения может быть ограничено.
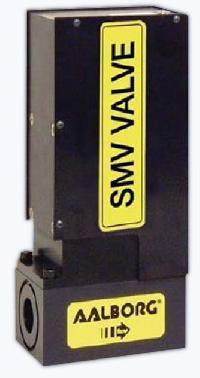
Рисунок 27 - SMV Прецизионный двухходовой игольчатый регулирующий клапан с шаговым приводом
Основные характеристики:
- Модель....................................................................................... SMV20-A;
- воздух............................................................................................200 slpm;
-Сv........................................................................................................ 0,336;
- присоединение...................................................................... Обжим. 3/8”;
- Материал................................................................................. Алюминий.
5.1.7 Выбор элементной базы для поворотной платформы
Для проверки датчиков угловой скорости, мною принято решение использовать поворотную платформу с шаговым двигателем, для точного управления вычислительным устройством углом поворота платформы.
Расчет мощности двигателя:
Технические характеристики платформы:
максимальная угловая скорость платформы, м...........................15/с;
масса платформы с датчиками, m....................................................... 4 кг;
габаритные размеры:
толщина диска, h............................................................................................20мм;
диаметр, D .................................................................................................... 300мм;
Pc = Pm/, (5.10)
где Pc – мощность на валу электродвигателя;
Pm – мощность на валу исполнительного механизма, платформы;
- коэффициент полезного действия передачи от электродвигателя к платформе.
Pc = Mc*, (5.11)
где Mc – статический момент сопротивления, приведенный к валу двигателя;
- угловая скорость вращения двигателя
Pm = Mm*m, (5.12)
где Mm – момент сопротивления платформы;
m – угловая скорость вращения платформы имитатора.
Mc = Mm/*i, (5.13)
где i = /m – передаточное отношение системы передач.
i = (15/сек)/360= 0,04 (1/с).
Для передачи вращения от двигателя на платформу используем 2-х ступенчатый планетарный редуктор, т.к. он наиболее полно удовлетворяет массо-габаритным требованиям при наибольшем коэффициенте передачи.
Передаточное число для 2-х степенной передачи рассчитывается:
i2 = ((z1+z3)/z1)*((z4+z6)/z4

Рисунок 28 - Кинематическая схема редуктора
z1 = z4 =10,
z3 = z6 = 40,
i2 = 25.
КПД 2-х ступенчатого редуктора составляет = 0,95.
Обороты двигателя рассчитываются по формуле:
= i*m,
= 15*0,04 = 0,6(1/сек) или = 36 (1/мин).
Т.к. на платформе нагрузка распределена равномерно, то момент:
Mm = m*D/4,
Mm = (4*0,3)/4 = 0,3 (кг*м) или 3 Н*м.
Статический момент сопротивления, приведенный к валу двигателя:
Mc = Mm/*i,
Mc = 3/(0,95*25) = 0,12 H*м.
Мощность требуемого двигателя рассчитывается:
Pc = Mc*,
Pc = 0,12*36 = 4,32 Вт.
Исходя из расчетов, выбираем гибридный шаговый двигатель FL86STH65-2808A.
Гибридный шаговый двигатель FL86STH65-2808A:
Технические характеристики двигателя:
рабочий ток/ фаза.................................................................................2,8А;
сопротивление/ фаза..........................................................................1,4Ом;
индуктивность/ фаза.........................................................................3,9мГн;
крутящий момент............................................................................34кг/см;
момент инерции ротора..............................................................1000г*см2;
длина.....................................................................................................65мм;
вес..........................................................................................................1,7кг;
величина полного шага..........................................................................1,8º;
погрешность углового шага................................................................0,09º;
погрешность сопротивления обмоток двигателя...............................10%;
погрешность индуктивности обмоток двигателя..................................20;
максимальное радиальное биение вала двигателя........................0,02мм;
максимальное осевое биение вала двигателя................................0,08мм;
максимальная допустимая осевая нагрузка на валу..........................60Н;
максимальная допустимая радиальная нагрузка на валу................220Н;
температурный диапазон эксплуатации......................от -20ºС до +50ºС.
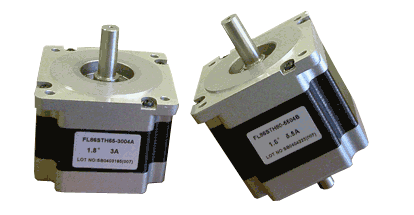
Рисунок 29 - Гибридный шаговый двигатель FL86STH65-2808A