

Определение положений аналитическим методом.
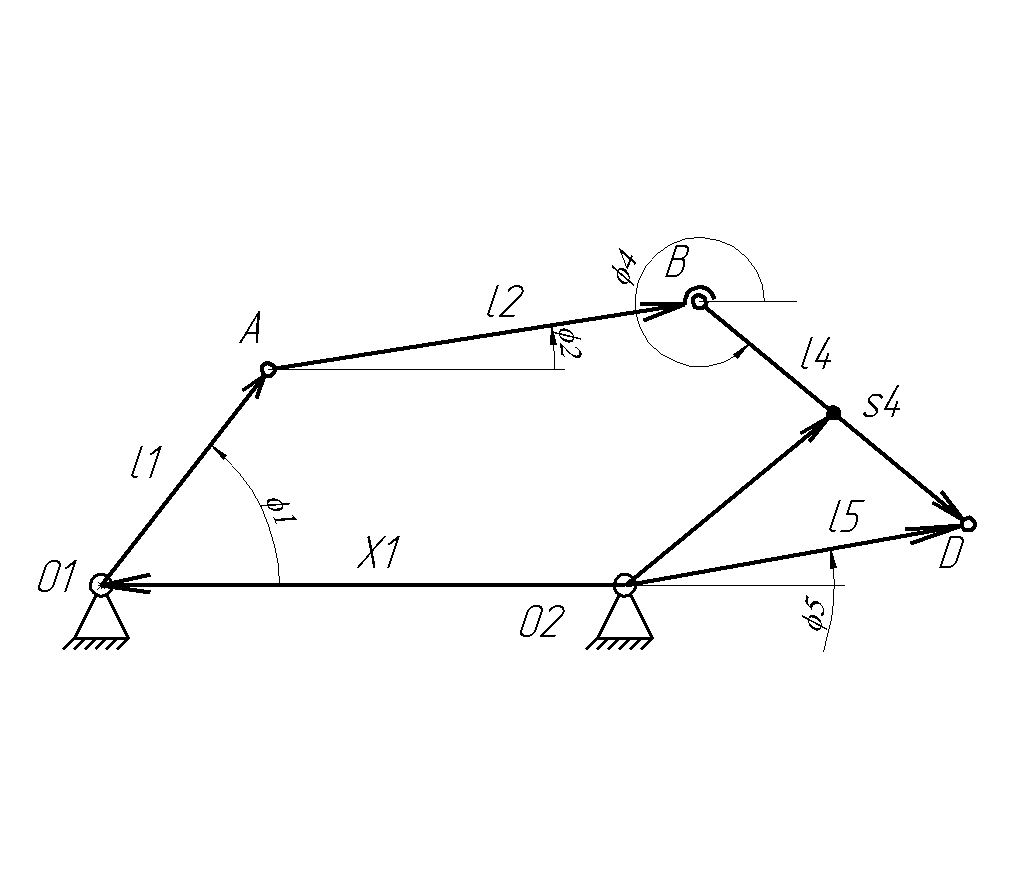
Определяем методом векторных замкнутых контуров. Рисуем схему в промежуточном положении и выявляем векторные контуры для расчета.
Первый векторный контур:
![]() Проецируем
на оси координат:
Проецируем
на оси координат:

![]()
![]() (2.1)
(2.1)
Проведем
замену: ![]()
![]()
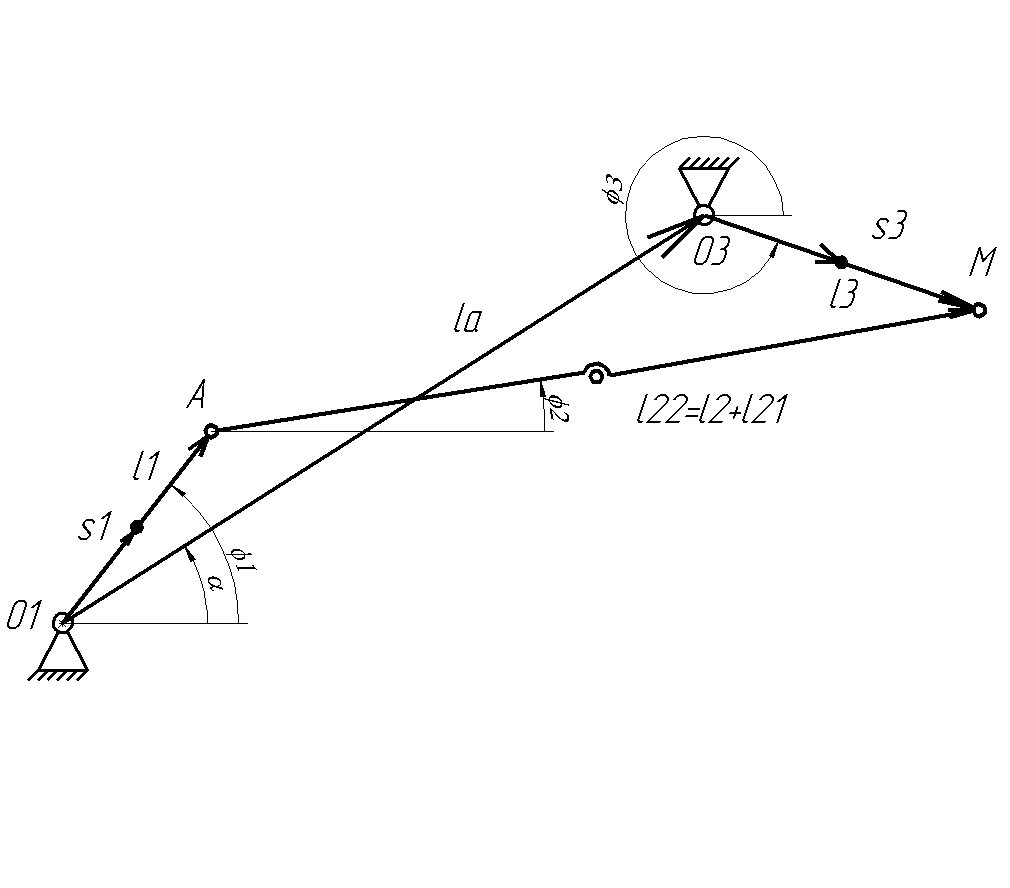
=arctg(y/(x1+x2))=32.47 la=((x1+x2)2+y2)0.5=0.595м l22=0.608м
Первый векторный контур
Тогда система примет вид:
![]()
![]() (2.2)
(2.2)
![]()
![]()
![]()
![]()
![]()
![]()

![]()
Для решения тригонометрического уравнения произведем замену:
 и
и  примем
примем
![]()
тогда
![]()
![]()
![]() или
или
![]()
![]()
![]()
![]()
![]()
Рассчитываем
значения 2 и
3 в расчетном
положении, решая систему при
![]()
![]()
![]()

![]()
![]() ,
,
![]()
![]()
получим: ![]() ;
;
![]()
Значения φ1 , φ2 , φ3 заносим в таблицу 2.2
Второй векторный контур
![]()
Проектируем на оси координат:
![]()
![]() (2.2)
(2.2)
Проведем
замену: ![]()
![]()
Тогда система примет вид:
![]()
![]() (2.3)
(2.3)
![]()
![]()
![]()
![]()
![]()
![]()

![]()
Для решения тригонометрического уравнения произведем замену:
 и
и  примем
примем
![]()
тогда
или
![]()
![]()
![]()
Рассчитываем значения 4 и 5 в расчетном положении:
![]()
![]()

![]()
![]()
![]()
![]()
получим: ![]() ;
;
![]()
Значения φ4 , φ5 заносим в таблицу 2.2
Система уравнений для определения координат центра тяжести звеньев 1, 3, 4:
S1x = 0.5l1cos(1) S3x = 0.5l3cos(3) S4x = l5cos(5)-ls4cos(4)
S1y = 0.5l1sin(1) S3y = 0.5l3sin(3) S4y = l5sin(5)-ls4sin(4) (2.4)
S1x = 0.5l1cos(1) = 0.50,19cos(66)=0,038
S1y = 0.5l1sin(1) = 0.50,19sin(66)=0,087
S3x = 0.5l3cos(3) = 0.50,228cos(74,3)=0,031
S3y = 0.5l3sin(3) = 0.50,228sin(74,3)=0,11
S4x = l5cos(5)-ls4cos(4) = 0,243cos(54,7)-0,122cos(319,6)=0,048
S4y = l5sin(5)-ls4sin(4) = 0,243sin(54,7)-0,122sin(319,6)=0,277
В расчетном положении: S1x = 0.038м S1y = 0,087м
S3x = 0.031м S3y = 0,11м S4x = 0.048м S4y =0.277м
2.3 Определение скоростей звеньев механизма.
Аналитическое определение скоростей звеньев механизма.
Аналитическое определение аналдогов скоростей основано на дифференцировании по общей координате (1) уравнений (2.1), (2.3), (2.4), (2.5).
После дифференцирования уравнений системы (2.1) получаем:
-l11sin(1) – l22f2sin(2) + l3f3sin(3) = 0
l11cos(1) + l22f2cos(2) - l3f3cos(3) = 0 (2,6)
Где 1 – аналог угловой скорости звена 1 1 = -1, т.к. ω направлена против хода часовой стрелки.
Решая систему относительно неизвестных получим:
3 = (l11(cos(1) – sin(1)ctg(2))) / (l3(cos(3) – sin(3)ctg(2)))
2 = (l33sin(3) – l11sin(1)) / (l22sin(2))
В расчетном положении
3 = (l11(cos(1) – sin(1)ctg(2))) / (l3(cos(3) – sin(3)ctg(2)))=
= (0,19(-1)(cos(66) – sin(66)ctg(36,9))) / (0,228(cos(74,3) – sin(74,3)ctg(36,92)))=-0,669
2 = (l33sin(3) – l11sin(1)) / (l22sin(2))=
= (0,228(-0,669)sin(74,3) – 0,19(-1)sin(66)) / (0,608sin(36,9))=0,074
3 =-0.669, 2 = 0.074
Дифференцируем уравнение (2.3):
-l11sin(1) – l2f2sin(2) + l5f5sin(5) – l4f4sin(4) = 0
l11cos(1) + l2f2cos(2) – l5f5cos(5) + l4f4cos(4) = 0 (2.7)
Решая систему относительно неизвестных получим:
-l11sin(1-4) – l2f2sin(2-4) + l5f5sin(5-4) – l4f4sin(4-4) = 0
l11cos(1-4) + l2f2cos(2-4) – l5f5cos(5-4) + l4f4cos(4-4) = 0
-l11sin(1-4) – l2f2sin(2-4) + l5f5sin(5-4) = 0
l11cos(1-4) + l2f2cos(2-4) – l5f5cos(5-4) + l4f4 = 0
f5=(l11sin(1-4) + l2f2sin(2-4))/ (l5sin(5-4))
f4=(-l11cos(1-4) - l2f2cos(2-4) + l5f5cos(5-4))/l4
В расчетном положении:
f5=(l11sin(1-4) + l2f2sin(2-4))/ l5sin(5-4)=
=(0,19(-1)sin(66-319,6)+0,3040,074sin(36,9-319,6))/ (0,243sin(54,7-319,6))=-0,662
f4=(-l11cos(1-4) - l2f2cos(2-4) + l5f5cos(5-4))/l4=
=(-0,19(-1)cos(66-319,6)-0,304(0,074)cos(36,9-319,6)+0,243(-0,662)cos(54,7-319,6))/0,32=-0,183
5 = -0,662, 4 = -0,183 заносим эти значения в таблицу 2.4
Дифференцируем систему (2.4):
S3x = -0.5l33sin(3) S1x = -0.5l11sin(1)
S3y = 0.5l33cos(3) S1y = 0.5l11cos(1)
S4x = -l55sin(5) + ls44sin(4)
S4y = l55cos(5) – ls44cos(4) (2.8)
В расчетном положении:
S3x = -0.5l33sin(3) = -0.50,228(-0,669)sin(74,3)=0,073
S3y = 0.5l33cos(3) = 0.50,228(-0,669)cos(74,3)=-0,021
S1x = -0.5l11sin(1) = -0.50,19(-1)sin(66)=0,087
S1y = 0.5l11cos(1) = 0.50.19(-1)cos(66)=-0.038
S4x = -l55sin(5) + ls44sin(4) =
= -0.243(-0.662)sin(54.7)+0.122(-0.183)sin(319.6)=0.146
S4y = l55cos(5) – ls44cos(4)=
= 0.243(-0.662)cos(54.7)–0.122(-0.183)cos(319.6)=-0.076
Результаты расчета скоростей в расчетном положении. Таблица 2.4
В Метод |
2 |
3 |
4 |
5 |
Аналитический |
0.074 |
-0.669 |
-0.183 |
-0.662 |
Графический |
0.074 |
-0.667 |
-0.186 |
0.664 |
отклонение |
0 |
0.3 |
1.63 |
0.3 |
 еличина
еличина
В еличина Метод |
S1x’ |
S1y’ |
S3x’ |
S3y’ |
S4x’ |
S4y’ |
Аналитический |
0,087 |
-0,038 |
0,073 |
-0,021 |
0,146 |
-0,076 |
Графический |
0,087 |
-0,038 |
0,074 |
-0,021 |
0,146 |
-0,076 |
отклонение |
0 |
0 |
0,01 |
0 |
0 |
0 |
Погрешность в пределах инженерной. Расчеты считаем верными.