

1.Структурный анализ механизма.
1.1. Рисуем структурную схему машины (рис.1.2).
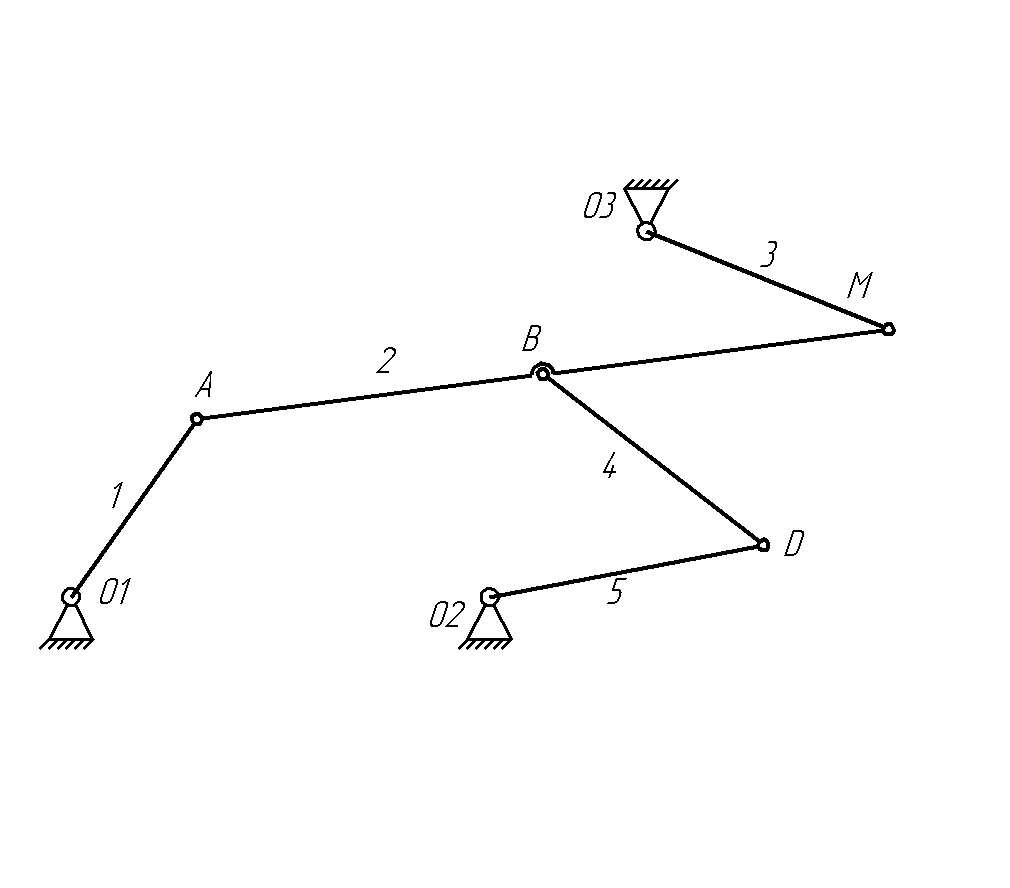
Рис.1.2. Структурная схема машины
1.2. Выявляем сложные и разнесённые кинематические пары.
Данный механизм не содержит разнесенных и сложных кинематических пар.
1.3. Класифицируем кинематические пары: определяем их название; подвижность; количество пар одной подвижности; общее количество пар одной подвижности ; общее количество кинематических пар в механизме; вид реализуемого в паре замыкания; вид контакта элементов кинематических пар ( высшие – низшие) Таблица 1.2.
Классификация кинематических пар
Таблица 1.2
№ п/п |
Номер звеньев, образующих пару |
Условное обозначение |
Название |
Подвижность |
Высшая /низшая |
Замыкание |
Открытая /закрытая |
1 |
0-1 |
|
Вращательная |
1 |
Н |
Г |
З |
2 |
1-2 |
А |
Вращательная |
1 |
Н |
Г |
З |
3 |
2-3 |
M |
Вращательная |
1 |
Н |
Г |
З |
4 |
2-4 |
B |
Вращательная |
1 |
Н |
Г |
З |
5 |
0-3 |
О3 |
Вращательная |
1 |
Н |
Г |
З |
6 |
4-5 |
D |
Вращательная |
1 |
Н |
Г |
З |
7 |
5-0 |
О2 |
Вращательная |
1 |
Н |
Г |
З |
Исследуемый
механизм состоит только из одноподвижных
кинематических пар
![]() ,где
,где
![]() число
одноподвижных кинематических пар в
механизме,
число
одноподвижных кинематических пар в
механизме,
![]() -
общее число кинематических пар в
механизме.
-
общее число кинематических пар в
механизме.
1.4. Подсчитываем и классифицируем подвижные звенья механизма.
Классификация звеньев
Таблица 1.3
№ п/п |
Номер звена |
Условное обозначение |
Название |
Движение |
Число вершин (t) |
1 |
0 |
О1,
О2,
O3 |
Стойка (0) |
Отсутствует |
- |
2 |
1 |
О1
А
1 |
Кривошип (1) |
Вращательное |
2 |
3 |
2 |
M
A
В |
Шатун (2) |
Сложное |
3 |
4 |
3 |
M
О3 |
Кулиса (3) |
Вращательное |
2 |
5 |
4 |
B
D |
Шатун (4) |
Сложное |
2 |
6 |
5 |
D
О2
|
Кривошип (5) |
Вращательное |
2 |
Механизм
имеет четыре
![]() двухвершинных (t=2) линейных
звена; одно
двухвершинных (t=2) линейных
звена; одно
![]() трехвершинное (t=3) звено
2, которое является базовым;
пять (n=5) подвижных звеньев.
трехвершинное (t=3) звено
2, которое является базовым;
пять (n=5) подвижных звеньев.
1.5. Определяем число присоединений подвижных звеньев к стойке.
Механизм имеет три (S=3) присоединений к стойке.
1.6 Выделяем в исследуемом механизме самостоятельные структурные группы, элементарные и простые механизмы , а также механизмы с разомкнутыми кинематическими цепями .
В данном механизме можно выделить один элементарный механизм. (рис.1.3)
O1
1
Рис 1.3. Элементарный механизм
И два простых, шарнирный четырехзвенник и двухподвижный пятизвенник
(рис 1,4),
C
О1
А
M
О3
О2
D
О3
B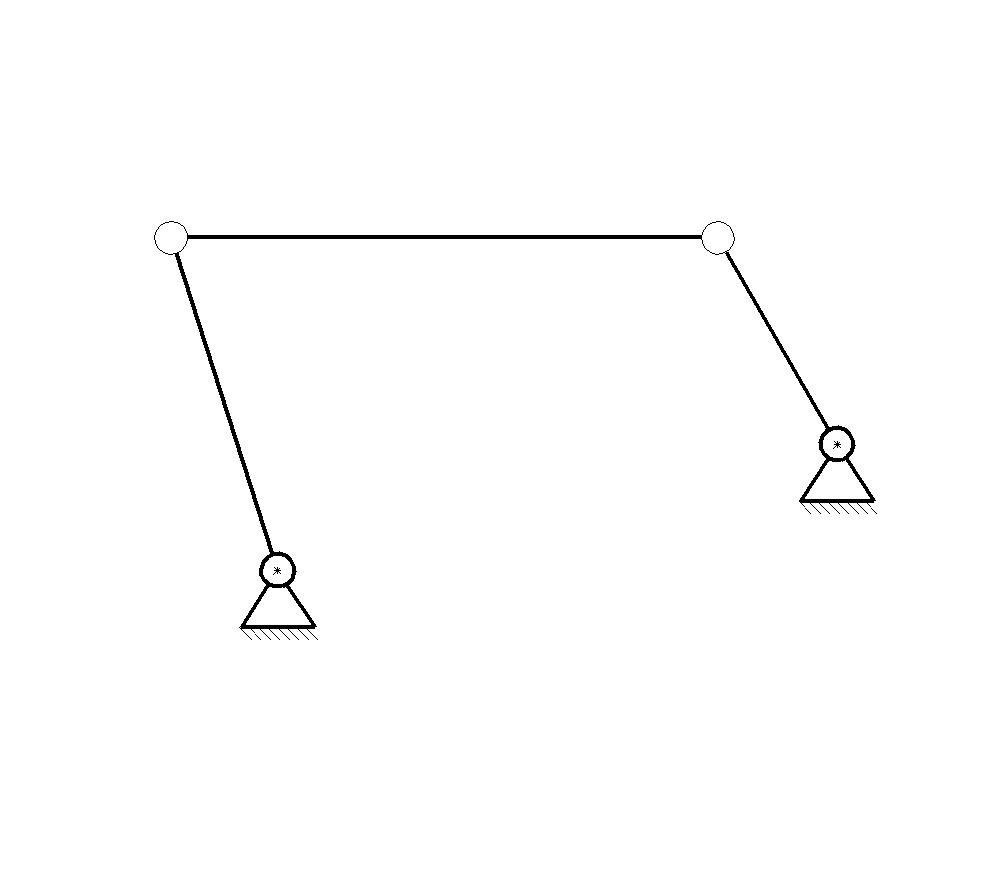
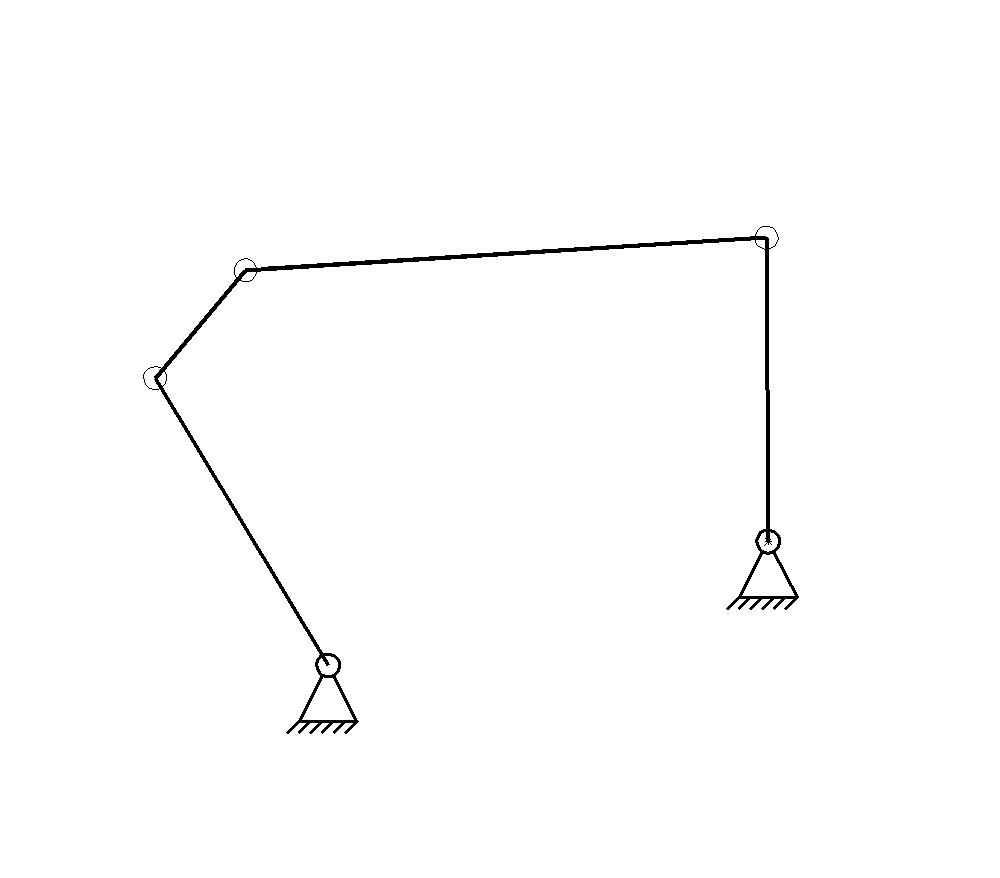
Рис. 1.4.
Механизмов с разомкнутыми кинематическими цепями нет
1.7. Выявляем простые стационарные и подвижные механизмы. Сложный механизм имеет в своем составе только простые стационарные механизмы.
1.8.
Находим звенья закрепления и присоединения.
В исследуемом сложном механизме звеньев
закрепления нет. У него одно звено
присоединения - звено 2
(шатун). Звено 2
одновременно входит в два простых
механизма –шарнирный
черырехзвенник и двухподвижный
пятизвенник. Значит для этого звена
![]() .
.
1.9. Классифицируем механизм. Исследуемый механизм имеет постоянную структуру, является сложным.
1.10. Определяем подвижность простых механизмов.
Анализ
движений звеньев механизма и элементов
кинематических пар показывает, что и
исследуемые простые механизмы, и сам
сложный механизм существуют в трехподвижном
![]() пространстве, в котором разрешены
следующие простейшие независимые
движения:
пространстве, в котором разрешены
следующие простейшие независимые
движения:
два поступательных x и y вдоль соответствующих осей
одно вращательное
 вокруг оси Z.
вокруг оси Z.
Подвижность механизмов находиться по формуле:
![]() (1.1)
(1.1)
где W – подвижность механизма;
n – число подвижных звеньев механизма;
![]() –
число
кинематических пар i-той подвижности;
–
число
кинематических пар i-той подвижности;
Определим
подвижность шарнирного четырехзвенника.
Mеханизм имеет: три
![]() подвижных звена; четыре
подвижных звена; четыре
![]() одноподвижные кинематические пары.
Тогда его подвижность определиться:
одноподвижные кинематические пары.
Тогда его подвижность определиться:
![]()
1.11. Определяем подвижность сложного механизма.
Подвижность сложного механизма определяется по формуле:
![]() (1.2)
(1.2)
1.12. Выделяем в исследуемом устройстве механизм I класса. В соответствии с классификацией И.И. Артоболевского механизм I класса для исследуемого механизма совпадает с элементарным механизмом.
1.13.
В
В
D
А
M
О3
B
O2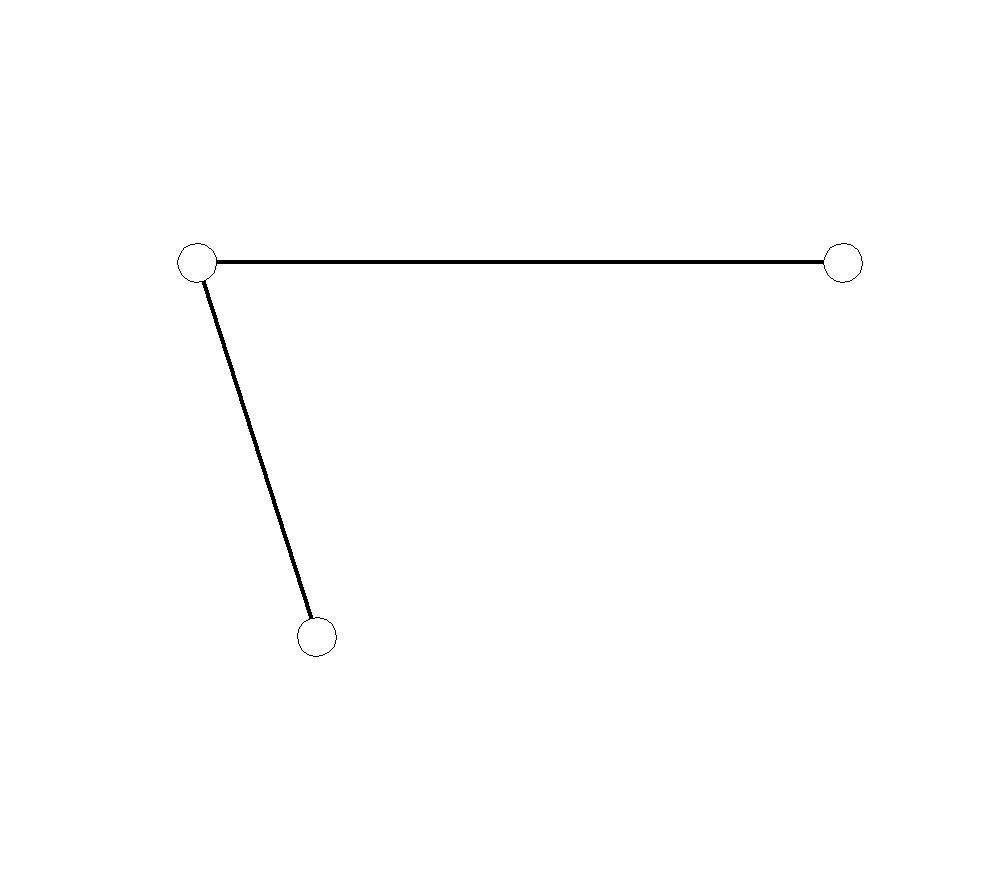
Рис.1.5. Структурные группы Ассура
1.14. Проверяем, распадаются ли выделенные структурные группы на более простые. Видно, что выделенные структурные группы являются самыми простыми для трехподвижного пространства, в котором существует исследуемый механизм, и, значит, они не могут иметь в своем составе другие более простые группы Ассура.
1.15. Проводим классификацию структурных групп по И.И. Артоболевскому
Классификация структурных групп
Таблица 1.4
№ п/п |
Структурная схема |
Номер звеньев, образующих группу |
Класс, порядок, вид |
1 |
O1
1 |
0-1 |
Механизм I класса |
2 |
O3
M
3
A
2 |
2-3 |
II класс 2 порядок 1-вид
|
3 |
O2
D
B
4
5
|
4-5 |
II класс 2-порядок 1-вид |
1.16. Определяем класс сложного механизма.
Механизм относится ко II классу.
Кинематический анализ механизма
Определение крайних положений механизма аналитическим методом
Начальное положение.
Это положение должно реализовываться, когда звенья О1А и АM выстраиваются в одну линию, причем О1M = АM - О1А.
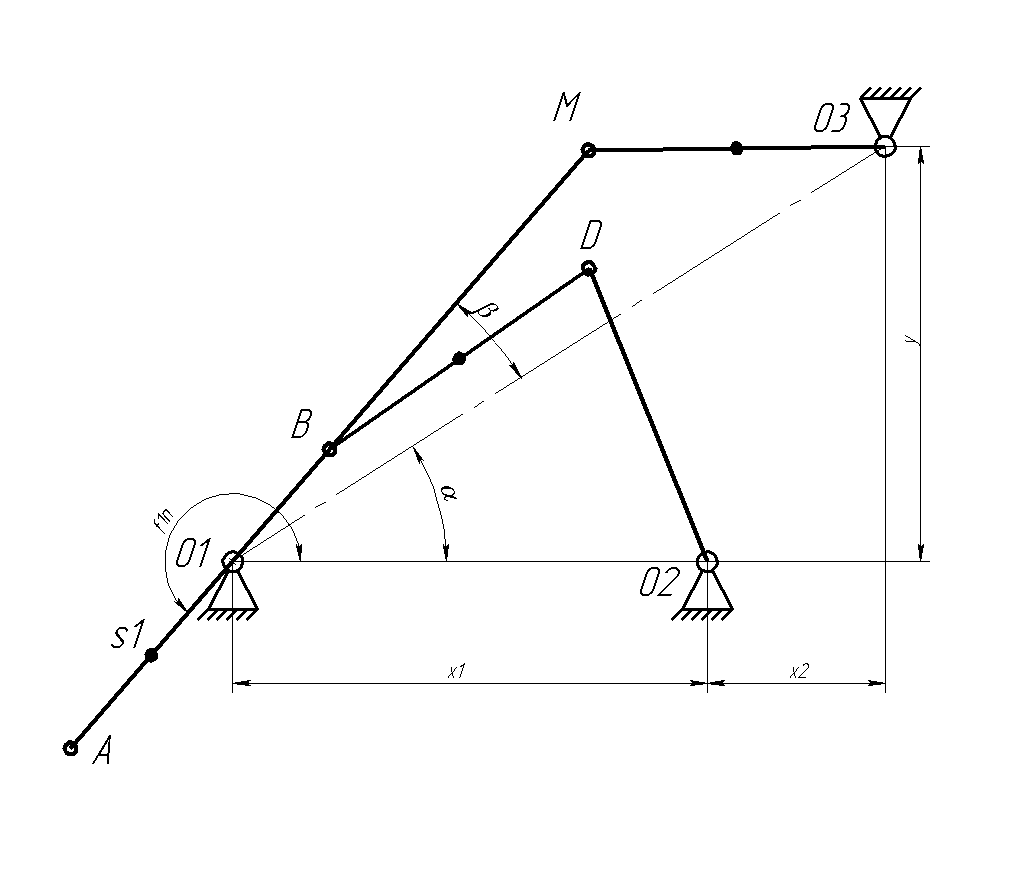
н=f1n=180++
где
![]()
![]()
O1O3=la=((x1+x2)2+y2)0.5=((0.365+0.137)2+0.3192)0.5=0.595
AM=l22=AB+BM=0.304+0.304=0.608м
β определим из треугольника О1О3М по теореме косинусов:
=arccos((O1M2+O1O32-O3M2)/(2O1MO1O3)=
arccos(((0.608-0.19)2+0,5952-0.2282)/(2(0.608-0.19)0.608) =16.6
н =180+16,6+32,47=229.111
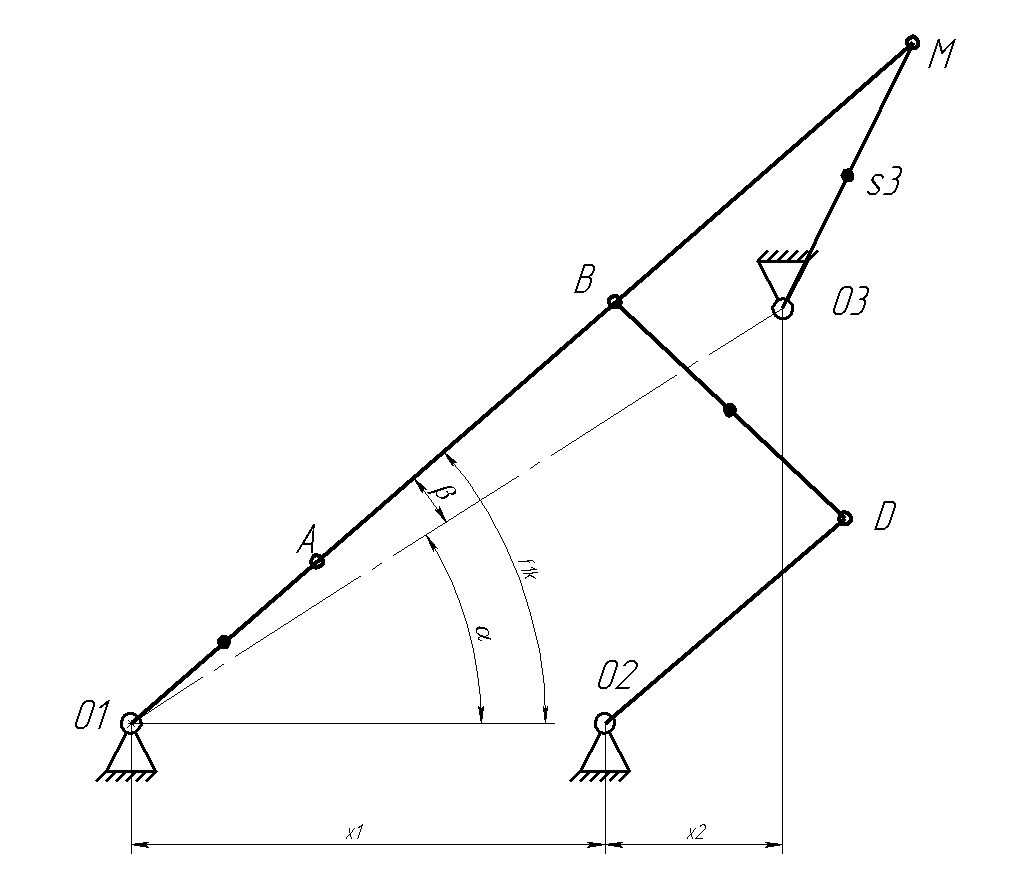
к=f1k= +
β определим из треугольника О1О3М по теореме косинусов:
=arccos((O1M2+O1O32-O3M2)/2O1MO1O3)=
arccos(((0,608+0,19)2+0,5952-0,2282)/(2(0,608+0,19)0,608) =8.57
к =32,47+8,57= 41.04
Графическое построение планов положения исследуемого механизма.
Выбираем масштабный коэффициент длин l = 0.19/80=0,002375 м/мм и рассчитываем чертежные размеры звеньев (табл. 2.1).
Таблица 2.1
|
О1А |
АВ |
ВM |
MО3 |
BD |
DО2 |
Х1 |
Х2 |
Y1 |
|
l1 |
l2 |
l21 |
l3 |
l4 |
l5 |
X1 |
X2 |
Y1 |
м |
0,19 |
0,304 |
0.304 |
0.228 |
0.243 |
0.243 |
0.365 |
0.137 |
0.319 |
мм |
80 |
128 |
128 |
96 |
102.4 |
102.4 |
153.6 |
57.6 |
134.4 |
Планы механизма на чертеже строим следующим образом:
Отмечаем на чертеже неподвижные точки О1, О2, О3, рисуем в них вращательные кинематические пары.
Проводим траектории движения: точки А – окружность радиусом О1А из т. О1; точки D – дугу радиусом О2D из т. О2; точки M – дугу радиусом О3M из т. О3;.
Начиная от точки А0 окружность радиуса О1А делим на 12 частей.
- Точки деления обозначаем А1 А2 А3 ….в направлении вращения звена О1А.
- Строим положения кривошипа, соединяя точки Вi с Аi
- Методом засечек строим план положений механизма для каждого положения кривошипа
- C помощью обратного построения определяем положения начала действия момента Mc. Рабочий ход звена 5 составляет 5max=75,1, момент дначала действия Мc при 5=0,45max =30,04, отсчитывая от положения 0 в сторону вращения звена 5. Этому положению соответствует 1=109,56.
- При построении планов механизма отмечаем положения центров масс звеньев 1, 3, 5 и строим их траектории.
- Проверяем с помощью линейки и транспортира углы наклона (в положении 6), результаты измерения заносим в таблицу 2.2.
Результаты расчета в расчетном положении.
Т аблица
2.2
аблица
2.2
Величина Метод |
10 |
20 |
30 |
40 |
50 |
Аналитический |
66 |
36,9 |
74,3 |
319,6 |
54,7 |
Графический |
66 |
37 |
74 |
320 |
55 |
Отклонение |
0 |
0,27 |
0,41 |
0,13 |
0,55 |
Величина Метод |
S1x.M |
S1y.M |
S3x.M |
S3y.M |
S4x.M |
S4y.M |
Аналитический |
0.038 |
0.087 |
0.031 |
0.11 |
0.048 |
0.277 |
Графический |
0.038 |
0.087 |
0.031 |
0.109 |
0.047 |
0.278 |
Отклонение |
- |
- |
- |
- |
- |
- |
Погрешность не превышает инженерной (5 %), следовательно, расчеты можно считать верными.