

5.8. Условия прочности по нормальным напряжениям
Для обеспечения прочности балки необходимо, чтобы наибольшие растягивающие и наибольшие сжимающие напряжения при изгибе в опасном сечении, т. е. в сечении, где М имеет наибольшее значение, не превосходили соответствующих допускаемых напряжений (рассматриваются только балки с постоянным по всей длине поперечным сечением).
Обозначим (рис. 5.10 б) ht расстояние до наиболее удаленного от нейтральной оси растянутого волокна, hc расстояние до наиболее сжатого волокна. Тогда наибольшее растягивающее напряжение при изгибе наибольшее сжимающее напряжение (взятое по абсолютному значению)
![]() (5.15)
(5.15)
![]() (5.16)
(5.16)
Для хрупких материалов (например, чугуна) допускаемые напряжения на растяжение и сжатие различны. Поэтому для балок из таких материалов обычно применяют сечения, не симметричные относительно нейтральной оси. При этом сечение располагают таким образом, чтобы ht < hc. В указанных случаях надо составлять два условия прочности:
по наибольшим растягивающим напряжениям
![]() (5.17)
(5.17)
по наибольшим сжимающим напряжениям
![]() (5.18)
(5.18)
где Wxt и Wxc моменты сопротивления растянутого и сжатого волокон.
Если сечение балки симметрично относительно нейтральной оси (такие сечения целесообразно применять для балок из пластичных материалов), то получим формулу
![]() (5.19)
(5.19)
Обозначив,
![]() получим при одинаковых допускаемых
напряжениях на растяжение и сжатие
получим при одинаковых допускаемых
напряжениях на растяжение и сжатие
![]() следующее
условие прочности:
следующее
условие прочности:
![]() (5.20)
(5.20)
Величина Wx называется осевым моментом сопротивления или моментом сопротивления при изгибе.
Пример. Подобрать
сечение балки двутаврового профиля
пролетом
L=6
м, нагруженной равномерно распределенной
нагрузкой q
= 40
кН/м,
![]() =
160 МПа =
160.103
кПа.
=
160 МПа =
160.103
кПа.
Решение. Для этого случая наибольший изгибающий момент имеет место в среднем cечении балки:
![]()
Требуемый момент сопротивления
![]()
Из таблиц сортамента выбираем двутавр № 45, у которого Wx = 1231 см3 (при этом Wx будет недонапряжение < 5%, что допустимо).
5.9. Потенциальная энергия деформации при изгибе
При изгибе работа, производимая внешними силами, затрачивается на изменение потенциальной энергии деформированного стержня. Работа внешнего момента Ме может быть вычислена по формуле
![]() ,
,
где угол поворота сечения в точке приложения момента.
Элементарная работа изгибающего момента может быть найдена по формуле:
![]() (5.21)
(5.21)
Полная работа изгибающих моментов для балки длиной L
![]() (5.22)
(5.22)
Потенциальную энергию изгиба, равную работе внутренних сил, взятую с обратным знаком, можно определить по формуле
![]() (5.23)
(5.23)
В общем случае изгиба в поперечных сечениях балки кроме изгибающих моментов возникают еще и поперечные силы.
Однако потенциальная энергия сдвига, соответствующая работе поперечной силы, как показывают исследования, невелика, и ею, обычно пренебрегают.
Поэтому формула (5.23) пригодна и для чистого, и для общего случая изгиба.
5.10. Теорема о взаимности работ. Теорема о взаимности перемещений
Докажем теорему, имеющую важные приложения, а именно теорему о взаимности работ. Для этого рассмотрим какую-нибудь линейно-деформируемую систему в двух различных, состояниях, отвечающих двум различным нагрузкам (рис. 5.11) Для простоты выкладок рассмотрим простую балку, нагруженную в обоих состояниях самой простой нагрузкой (по одной сосредоточенной силе). Нагрузка, внутренние усилия и деформации, соответствующие этим состояниям, отмечены индексами 1 и 2.
На рис. 5.11 а изображено первое состояние системы, а на рис. 5.11 б второе.
Перемещение по направлению нагрузки в первом состоянии от этой же нагрузки обозначено ∆11. Перемещение по направлению нагрузки второго состояния, вызванное действием нагрузки первого состояния, обозначено ∆21. Обозначения перемещений второго состояния приведены на рис. 5.11 б. Перемещения, содержащие в своем обозначении два одинаковых индекса, как, например, ∆11 ,∆22, называются главными, а перемещения вида ∆ 21, ∆ 12 и т. д. побочными. Докажем теперь теорему о взаимности работ, а именно: работа внешних сил первого состояния на перемещениях второго состояния равна работе сил второго состояния на перемещениях, вызванных силами первого состояния.
а)
б)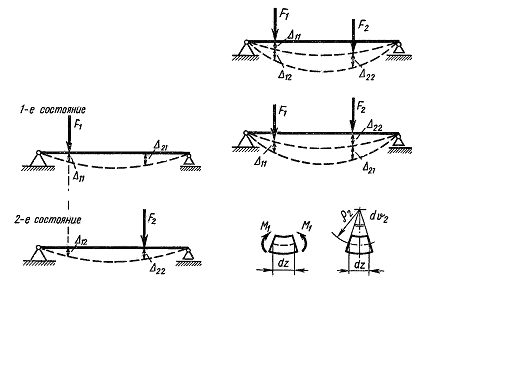
а)
б)
Рис. 5.11. Рис. 5.12.
Для доказательства теоремы нагрузим балку силами F1 и F2 , прикладывая их в разной последовательности.
1. Вначале приложим нагрузку F1, а затем к деформированной балке приложим силу F2 (рис. 5.12 а).
Подсчитаем работу, произведенную при этом внешними силами.
Работа, произведенная
силой
F1
на собственном
перемещении ∆11
вызванном
этой силой,
![]() Работа, произведенная силой F2
на собственном перемещении ∆22,
Работа, произведенная силой F2
на собственном перемещении ∆22,
![]()
Дополнительная
работа силы F1
на перемещении
∆12,
вызванном силой F2,
![]()
Обращаем внимание на то, что при вычислении W12 множитель 1/2 отсутствует, так как сила F на перемещении ∆12 совершает работу, оставаясь постоянной.
Полная работа, совершенная внешними силами при первом способе (последовательности) нагружения,
![]() (5.24)
(5.24)
Работа W12, фактически совершаемая силой на перемещениях, вызванных другой силой (силами), называется дополнительной работой. Однако эта работа может и не совершаться, а может рассматриваться лишь как возможная, т. е. такая, которая будет произведена, если нагрузить систему сразу обеими нагрузками. Такую работу называют виртуальной (возможной) работой.
При дальнейших выкладках не будем делать различия между дополнительной и виртуальной работой.
2. Нагрузим теперь балку в другой последовательности: вначале приложим силу F2, а затем силу F1 (рис. 5.12 б). Работа, произведенная силой F2 на собственном перемещении ∆22,
![]() (5.25)
(5.25)
Работа, произведенная силой F1 на собственном перемещении ∆11,
![]() (5.26)
(5.26)
Работа, произведенная силой F2 на перемещении ∆21 ,
![]() (5.27)
(5.27)
Полная работа при втором способе нагружения
![]() (5.28)
(5.28)
Однако работа сил не зависит от порядка их приложения. Следовательно, W1 = W11, откуда получим
![]() (5.29)
(5.29)
или для рассматриваемого случая
![]() (5.30)
(5.30)
Этим доказана сформулированная выше теорема о взаимности виртуальных работ внешних сил. Мы доказали ее на примере сосредоточенных внешних нагрузок. Однако теорема остается справедливой и для любой внешней нагрузки: сосредоточенной, распределенной, внешних моментов. Следует только иметь в виду, что работа моментов вычисляется уже не на линейных, а на угловых перемещениях.
Аналогичным образом может быть доказана также взаимность виртуальной работы внутренних сил:
![]() (5.31)
(5.31)
Используя закон
сохранения энергии, можно показать, что
дополнительная работа внешних сил равна
по абсолютному значению дополнительной
работе внутренних сил:
![]() и
и
![]()
Из этого следует также, что
![]() (5.32)
(5.32)
Эти соотношения будут использованы далее для обоснования общего метода определения перемещений (метода Мора). Из теоремы о взаимности работ как частный случай следует другая важная теорема о взаимности перемещений.
Принимая F1 = F2 =1, получим
![]() (5.33)
(5.33)
Здесь перемещения,
вызываемые силами, равными единице
(единичными силами), обозначают
![]() и т. д.
и т. д.
Перемещение точки приложения единичной силы по ее направлению, вызванное второй единичной силой, равно перемещению точки приложения второй единичной силы по направлению последней, вызванному действием первой единичной силы.