

Параметри горизонтальних резонансних грохотів
Показники |
ГРЛ 61
|
ГРС-А |
ГРЛ 62 |
ГРЛ 71 |
ГРЛ 72 |
Розміри просівальної поверхні: ширина, мм довжина, мм площа, м2
|
2000 5000 10 |
2000 10000 20 |
2000 5000 10 |
2500 6000 15 |
2500 6000 15 |
Потужність електродвигуна, кВт
|
13 |
22 |
13 |
17 |
17 |
У грохотах резонансних двохкоробних (ГРД) немає важкої врівноважуючої рами, вона замінена нижнім коробом (рис. 4.35). Короби шарнірно закріплені на двох парах рівноплечих важелів-підвісок з центральними осями. Осі важелів-підвісок спираються через пружні амортизатори на стійки. Ексцентриковий привод розміщується на нижньому коробі, вал обертається за допомогою клинопасової передачі від електродвигуна, установленого на нерухомій опорі. Таким чином, система з двох кінематично жорстко (рівноплечі важелі-підвіски) зв'язаних мас (коробів) вільна в просторі (осі важелів спираються на амортизатори) і знаходиться під дією лише внутрішніх сил. При підвісці коробів на важелях не вимагається особливих пружинних опор, як це передбачено в грохотах з врівноважуючою рамою (див. рис. 4.35, поз. 6). Рівність мас коробів і рівноплечі підвіски забезпечують рівні амплітуди коробів.

Рис. 4.35. Загальний вигляд грохота типу ГРД:
1 – короб нижній; 2 – короб верхній; 3 – підвіска; 4 – опора; 5 – зв'язок пружний (приводу); 6 – привод; 7 – електродвигун; 8 – шків; 9 – пружний зв'язок коробів; 10 – домкрат; 11 – клинопасова передача
Амплітуда коливань короба 8–11 мм, частота – 500–620 коливань за хвилину. Основні переваги грохотів типу ГРД порівняно з грохотами з врівноважуючою рамою: значно менша маса, менші динамічні навантаження, простіша конструкція. Порівняно з інерційними та самобалансними грохотами резонансні грохоти більш металоємні та складні за конструкцією.
Вони в основному застосовуються на вуглезбагачувальних фабриках.
Резонансні грохоти з електромагнітним приводом.
Складаються з двох мас, зв'язаних між собою пружинами. Коливання цієї пружної системи створюються електромагнітним вібратором.
Короб 1 грохота та якір 2 вібратора, укріплений на ньому, складають одну коливну масу m1 (рис. 4.36). Допоміжний вантаж 3 з електромагнітом 4 вібратора утворюють другу коливну масу m2. Обидві маси сполучені пружинами (ресорами) 5. Уся система підвішена на пружинних підвісках 6 до нерухомої підтримуючої конструкції. При живленні вібратора змінним струмом якір 2 та сердечник електромагніту 4 поперемінно притягуються і відходять один від одного. При цьому обидві маси приходять у коливальний рух. Маси й жорсткість пружин (ресор) 5 вибирають такими, аби власні коливання мас збігалися або наближалися до їх вимушених коливань, тобто система налаштовується близько до резонансу. Пружини (ресори) 5 є вельми істотною частиною грохота. Вони врівноважують сили інерції коливних мас і завдяки ним порівняно слабкі механічні імпульси вібратора перетворюються в сильніші поштовхи, що впливають на короб 1 грохота.

Рис. 4.36. Схема двохмасного резонансного грохота
з електромагнітним вібратором
Вібратор установлюється під кутом до поверхні короба грохота (як і в усіх грохотах з горизонтальним або слабопохилим коробом), і вібрації викликають пересування матеріалу по ситу з підкиданням.
Електромагнітний вібратор має обмотки постійного та змінного струмів. Обмотки постійного струму живляться від мережі змінного струму через випрямляч. Накладення постійного струму на змінний у ланцюзі електромагнітів створює пульсуючий магнітний потік. Число коливань електровібратора виявляється рівним (синхронним) числу періодів змінного струму, тобто при струмі 50 періодів за секунду число коливань за хвилину складає 50·60 = 3000. Вібратор цієї системи має вельми високий коефіцієнт корисної дії та коефіцієнт потужності (cos φ = 1) і дає можливість плавного регулювання амплітуди вібрацій від нуля до максимальних значень шляхом дії постійним струмом малої потужності на збудження вібратора.
Грохоти з електромагнітним вібратором вигідно відрізняються від механічних грохотів (інерційних і гіраційних) тим, що приводяться в рух звичайними електродвигунами, у них відсутні проміжні передачі й частини, що обертаються. Вони безпечні в обслуговуванні та допускають легке регулювання амплітуди коливань короба.
Їх поширенню перешкоджає головним чином нестандартність електромагнітних вібраторів і необхідність мати надійні пружинні елементи, придатні для тривалої роботи при вібраційних навантаженнях.
Грохоти із самобалансовим вібратором.
Мають короб з одним або декількома ситами, що встановлюється на пружних опорах або підвішується через амортизатори до опорної конструкції. На коробі монтується самобалансовий вібратор, що створює коливання короба.
Вібратор складається з двох однакових дебалансів, які обертаються на паралельних валах у протилежні сторони з однаковим числом обертів (рис. 4.37).

Рис. 4.37. Схема дії самобалансового вібратора:
а–д – різні положення вантажів дебалансів
При будь-якому положенні вантажів дебалансів вібратора сили діють уздовж осі х. Складові відцентрової сили інерції, що діють уздовж осі y, взаємно погашаються як сили, протилежно направлені та рівні за величиною.
Якщо через φ позначити кут повороту вала кожного дебалансу, то рівнодійна уздовж осі х буде
![]() ,
,
де m – маса одного дебалансу, кг;
ω – кутова частота обертання дебалансу, с–1;
R – відстань від центру ваги дебалансу до осі його обер-тання, м.
Зусилля, що створюються вібратором, змінюються від нуля до максимального значення. Напрямок зусиль змінюється через кожні півоберта дебалансу.
Самобалансовий вібратор звичайної конструкції (рис. 4.38) складається із закритого корпусу 1 (картера), усередині якого обертаються два паралельні вали, що несуть однакові дебаланси 2. Один з валів приводиться в обертання від електродвигуна через гнучку передачу та шків 3; далі він передає обертання іншому валу через пару зубчастих коліс 4. Відцентрова сила інерції дебалансів передається на вали й через підшипники та корпус коробу грохота. Направлені коливання вібратора дозволяють застосовувати його для грохотів з горизонтальним коробом.
Схема вібраційного грохота із самобалансовим вібратором показана на рис. 4.39. Короб підвішують горизонтально через амортизатори до опорної конструкції або встановлюють на пружних опорах. Вібратор змонтований на опорній рамі, укріпленій на коробі під кутом 35–55° до площини сита.
Направлені коливання короба викликають рух матеріалу на ситі з підкиданням і забезпечують енергійне його струшування.
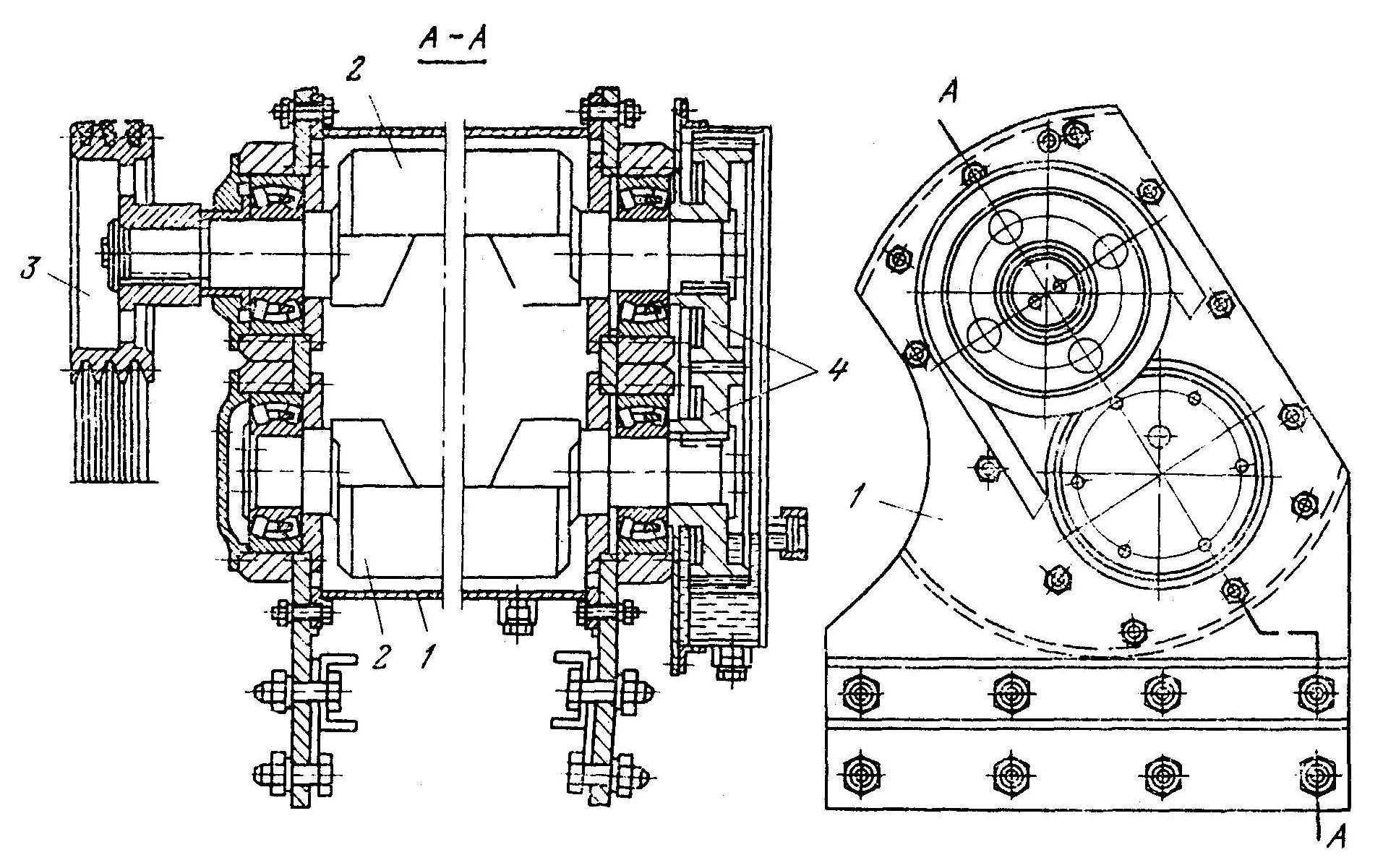
Рис. 4.38. Самобалансовий вібратор
Грохоти із ситами великих розмірів, наприклад 2000х4500 мм, мають по два самобалансових вібратори, що приводяться в обертання через загальний приводний вал.
Самобалансовий грохот іншого типу має еліптичні коливання короба, що створюються вібратором з чотирма паралельно розташованими валами, які несуть дебаланси й сполучені зубчастими передачами. При обертанні результуюча відцентрових сил інерції дебалансів однієї пари валів розташована в напрямку коливань, а результуюча сил інерції другої пари валів (менша за величиною) направлена перпендикулярно до напряму коливань. У результаті при обертанні валів вібратора короб коливається по еліптичній траєкторії. Еліптичні коливання сприяють кращому розшаруванню матеріалу та перевертанню шматків на ситах, що підвищує ефективність процесу.

Рис. 4.39. Схема вібраційного грохота із самобалансовим вібратором (з підвішеним коробом)
Самобалансові грохоти застосовуються для грохочення руд, зневоднення вугілля, горючих сланців, операцій мокрої класифікації, відділення суспензії від продуктів розділення у важких середовищах.
Самобалансові грохоти мають малі габаритні розміри за висотою, порівняно невелику металоємність (600–900 кг на 1 м2 робочої поверхні), вони прості й надійні в експлуатації, відрізняються ефективним режимом грохочення.
Недоліком самобалансового вібратора є його відносна складність – чотири підшипники для двох валів, пара зубчастих коліс, герметичний корпус з масляною ванною.
Самобалансові грохоти виготовляються легкого (ГСЛ), середнього (ГСС) і важкого (ГСТ) типів відповідно до умов експлуатації.
Технічні характеристики деяких з них наведені в табл. 4.8.
Таблиця 4.8