

Тема 1.1. Статика. Вступ. Основні поняття та аксіоми статики.
План лекції
1. Аксіоми статики.
2. Ідеальні зв’язки та їх реакції.
Аксіоми статики
Аксіома 1. (принцип інерції). Тверде тіло знаходиться в стані рівноваги (у спокої або рухається рівномірно та прямолінійно) до тих пір, поки зовнішня сила не виведе його з цього стану.
Аксіома 2. (умова рівноваги двох сил). Дві сили, що прикладені до твердого тіла, складають урівноважену систему сил тільки в тому випадку, коли вони чисельно рівні між собою, діють вздовж однієї лінії дії, але в протилежні сторони.
Аксіома 3. Якщо на тверде тіло діє будь-яка система сил, то не порушуючи стан тіла, із цієї системи можна виключити або додати до неї врівноважену систему сил.
З двох останніх аксіом виходить слідство: стан тіла не порушиться, якщо силу, що діє на тіло, перенести вздовж її лінії дії в будь-яку іншу точку, не змінюючи при цьому її напрямку та модулю.
Силу можна переносити по її лінії дії.
Аксіома 4. (правило паралелограма сил). Рівнодіюча двох сил, що додані до тіла в одній точці, додається в той же точці і зображується діагоналлю паралелограма, побудованого на даних силах, як на сторонах.

![]()
Аксіома 5. Усякій дії відповідає рівна й протилежна спрямована протидія.
Ідеальні зв’язки та їх реакції.
Будь-яке невільне тіло можна умовно представити вільним, якщо подумки звільнити його від зв'язків і замінити дію зв'язків на тіло їхніми реакціями.
Різновиди зв'язків:
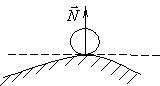
Ідеально гладка опорна поверхня або "вільне обпирання". Уважаючи поверхні тіла й зв'язку ідеально гладкими, таким чином у місцях зіткнення не виникає тертя. Оскільки зв'язок перешкоджає переміщенню тіла тільки в напрямках, перпендикулярних опорної поверхні, то реакція спрямована перпендикулярно площини зв'язку.
Опора в точці.
Реакція R0 спрямована перпендикулярно поверхні тіла в точці дотику.

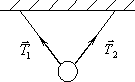
3. Гнучкий зв'язок {нерозтяжні нитки, троси, ланцюги).
Реакція гнучкого зв'язку завжди спрямований уздовж зв'язку убік від тіла до зв'язку.
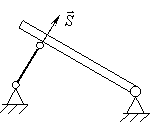
4. Стрижневий зв'язок.
У відмінності від гнучкого зв'язку стрижні можуть сприймати й розтяжне зусилля й зусилля стискаюче. Реакція спрямована уздовж прямій, що з'єднує центри шарнірів на кінцях стрижня (при розтяганні вона спрямована від тіла до зв'язку - знак (+); при стиску від стрижня до тіла - знак (-)).
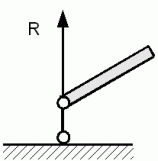
Шарнірно - рухлива.
Обмежує руху тіла в горизонтальній площині. Реакція спрямована перпендикулярно опорі.
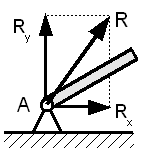
6. Шарнірно - нерухлива.
Обмежує рух тіла в горизонтальному й вертикальному напрямках. Реакція заміняється двома складовими, що збігаються по напрямку з обраними осями координат (Rx, Ry).

7. Жорстке защемлення

Питання для самоперевірки
Сформулюйте аксіоми статики.
Які тіла називають вільними, а які невільними?
Що називають зв язком?
Що зветься реакцією зв язку?
Які види зв язків ви знаєте (укажіть напрямки їх реакцій)?
Питання для самостійного вивчення:
Визначення напряму реакцій ідеальних зв’язків.
Виконання індивідуальних завдань.
Література:
Бычков Д.В. и Миров М.О. Теоретическая механика, 1976. с.14-23.
ЛЕКЦІЯ № 3