

Тема 2.1 Кінематика. Основні поняття кінематики.
План лекції
1. Види руху точки по заданій траєкторії в залежності від її прискорення.
2. Визначення параметрів руху точки по заданій траєкторії для будь-якого виду руху.
3. Поступальний рух твердого тіла.
4. Оберти тіла навкруг непорушної осі.
Види руху точки по заданій траєкторії в залежності від її прискорення.
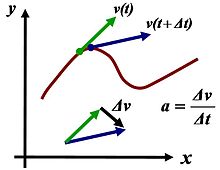
Прискорення - це зміна швидкості. У будь-якій точці траєкторії
прискорення задається не тільки зміною абсолютного значення швидкості, а й її напрямку. Прискорення визначається як границя відношенні приросту швидкості до інтервалу часу, за який цей приріст відбувся.
Види руху:
Рівномірний рух – це рух тіла, при якому прискорення не змінюється ні за величиною, ні за напрямком.
Нерівномірний рух - якщо точка в рівні проміжки часу проходить нерівні шляхи.
Рівномірно-змінний рух – рух, при якому за рівні проміжки часу швидкість змінюється на одну і ту ж величину.
2.Визначення параметрів руху точки по заданій траєкторії для будь-якого виду руху
Координатний спосіб завдання руху точки
Положення в просторі рухомої точки визначається трьома координатами в декартовій системі координат. Ці координати задаються як функції часу:
![]()
![]()
![]() (1)
(1)
Залежності (1) називаються рівняннями руху точки в декартових координатах.
Якщо рух точки відбувається в площині ХУ, то задаються тільки два рівняння руху:
При прямолінійному русі точки досить задати одне рівняння руху: , якщо прийняти, що вісь х збігається з прямою, по якій рухається точка.
Швидкість точки являє собою вектор, що характеризує швидкість і напрям руху точки в даний момент часу.
При завданні руху точки рівняннями (1) проекції швидкості на осі декартових координат дорівнюють:
![]()
![]()
![]()
Модуль швидкості
![]() (2)
(2)
Напрямок швидкості визначається напрямними косинусами:
![]()
![]()
![]()
Якщо
рух точки задається в площині ХУ, то;
![]()
![]()
![]()
![]()
При прямолінійному русі по осі х:
![]()
Характеристикою швидкості зміни швидкості є прискорення а. Прискорення точки одно похідною від вектора швидкості по часу:
![]()
При завданні руху точки рівняннями (1) проекції прискорення на координатні осі дорівнюють:
![]()
![]()
![]()
Модуль прискорення:
![]() (3)
(3)
Напрямок прискорення визначається напрямними косинусами
![]()
![]()
![]()
Якщо
рух точки задається в площині ХУ, то:
![]()
![]()
![]()
![]()
При прямолінійному русі по осі Х
![]()
Природний спосіб завдання руху точки:
Вважається,
що рух точки задано природним способом,
якщо вказані її траєкторія і закон зміни
криволінійної координати. Рівняння
називається
![]() законом
руху точки по траєкторії.
При цьому на траєкторії вказується
початок відліку, а також позитивний
напрямок відліку координати s у вигляді
стрілки
законом
руху точки по траєкторії.
При цьому на траєкторії вказується
початок відліку, а також позитивний
напрямок відліку координати s у вигляді
стрілки
![]() .
.
Модуль швидкості точки визначається за формулою
![]()
Вектор
швидкості V спрямований по дотичній до
траєкторії в бік стрілки
,
якщо
![]() ,
і в протилежну сторону, якщо
,
і в протилежну сторону, якщо
![]() .
.
Прискорення
точки визначається як векторна сума
дотичного і нормального прискорень
точки:
![]()
Модуль дотичного прискорення визначається за формулою
![]()
Вектор дотичного прискорення направлений по дотичній до траєкторії в бік стрілки , якщо , і в протилежну, якщо .
Модуль нормального прискорення визначається за формулою
![]()
де - ρ радіус кривизни траєкторії в даній точці.
Вектор
нормального прискорення
![]() завжди спрямований по головній нормалі
в бік центру кривизни траєкторії.
завжди спрямований по головній нормалі
в бік центру кривизни траєкторії.
Модуль
повного прискорення
![]()