

4. Задание № 2 на контрольную работу (ргр).
ИССЛЕДОВАНИЕ ЭЛЕКТРОПРИВОДА ПОСТОЯННОГО ТОКА
Основным средством приведения в движение рабочих машин является электрический двигатель, а, следовательно, основным типом привода служит электрический привод или электропривод (ЭП) [1, 4]. Наиболее широко используют системы автоматизированного электропривода (АЭП). Современные АЭП выполняют в виде замкнутых систем автоматического управления.
Основными управляемыми параметрами (координатами) электропривода принято считать частоту вращения, ток, момент, точность позиционирования (положение).
В качестве примера, рассмотрим электропривод с двигателем постоянного тока независимого возбуждения (ДПТНВ). Упрощенная электрическая схема системы управляемого ЭП постоянного тока с двигателем независимого возбуждения, включенного по системе «генератор двигатель» дана на рисунке 5. Якорь двигателя М непосредственно подсоединяют к якорю генератора G. Генератор G приводится в движение приводным (гонным) двигателем (на рисунке не показан). В промышленных условиях при наличии сети переменного тока в качестве приводного двигателя используют асинхронный короткозамкнутый двигатель. В автономных установках в качестве приводного двигателя используют двигатель внутреннего сгорания, паровую или газовую турбины и т. п. Регулируемой координатой является частота вращения д двигателя М. Регулирование угловой скорости осуществляют изменением напряжения Uя на якоре двигателя. Сигнал по скорости д измеряют тахогенератором BR, и в виде сигнала обратной связи Uос он поступает на вход управляющего устройства или регулятора, где сравнивается с сигналом задания Uзд, который формирует задатчик частоты вращения RР. На выходе узла сравнения определяют сигнал ошибки Uε = Uзд – Uос, который поступает на операционный усилитель, охваченный обратной связью из R и C элементов. Регулятор формирует управляющее воздействие Uу по определенному закону, которое поступает на усилитель мощности УМ, при этом изменяется напряжение Uв. на обмотке возбуждения генератора и в итоге изменяет напряжение на обмотке якоря двигателя, что в свою очередь приводит к изменению скорости вращения. К примеру, под действием нагрузки (возмущений) д начинает снижаться, это приводит к уменьшению сигнала обратной связи по скорости Uос, а сигнал ошибки будет увеличиваться Uε = Uзд – Uос. При этом повышается напряжение на выходе регулятора Uу, на выходе УМ Uв и на якоре двигателя Uя, что приведет д к заданному значению.
Рисунок 5 - Упрощенная принципиальная схема ЭП ДПТНВ с регулятором по скорости
RP - устройство сравнения, Р - регулятор, УМ - усилитель мощности, ОBG-обмотка
возбуждения генератора, G - генератор, М - двигатель, ОВМ - обмотка
возбуждения двигателя, BR – тахогенератор
Для регулирования параметров ЭП используют типовые законы регулирования: П–закон (пропорциональный), И–закон (интегральный), ПИ–закон (пропорционально интегральный), ПИД–закон (пропорциональный интегрально дифференциальный), А–закон (апериодический). Схемы П и ПИ регуляторов приведены на рисунке 6.
Включить выбранный регулятор в систему управляемого ЭП и привести полученную схему в пояснительной записке.

Рисунок 6 - Схема П и ПИ регуляторов, DA - операционный усилитель
По принципиальной схеме системы автоматизированного ЭП с ДПТНВ необходимо составить структурную схему (рисунок 7). В структурной схеме каждый элемент электропривода представлен передаточной функцией (ПФ) Wi(s), где s – аргумент преобразования Лапласа.
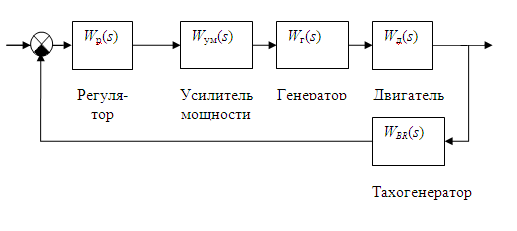
Рисунок 7 - Структурная схема электропривода с ДПТНВ
Для анализа системы управления ЭП используют аппарат теории управления [2, 3]. Систему автоматического управления ЭП исследуют на устойчивость и определяют показатели качества. Устойчивость и качественные показатели работы системы АЭП определяют по переходному процессу. Построение переходного процесса является достаточно трудоемкой процедурой. Однако существуют косвенные методы или критерии для определения устойчивости и качественных показателей.
Передаточные функции типовых элементов ЭП с ДПТНВ приведены в таблице 1.
Выражения передаточных функций Wi(s) Таблица 1
Wум(s) |
Wг(s) |
Wд(s) |
WBR(s) |
Wпи(s) |
Wп(s) |
Kyм |
|
|
|
|
Kп |
Значения коэффициентов и постоянных времени ПФ Wi(s) элементов ЭП даны в таблице 2.
Значение коэффициентов и постоянных времени Таблица 2
№ |
Kум |
Kг |
Tг |
Tд |
Kд |
KBR |
Kпи |
Tпи |
Kп |
1 |
1,4 |
2,8 |
0,15 |
1,4 |
1,0 |
0,75 |
0,6 |
6,0 |
0,7 |
2 |
1,5 |
2,0 |
0,025 |
0,4 |
1,5 |
0,79 |
0,8 |
6,0 |
0,75 |
3 |
1,08 |
2,0 |
0,18 |
0,9 |
1,4 |
0,88 |
0,03 |
15,0 |
0,9 |
4 |
1,51 |
2,6 |
0,04 |
1,2 |
1,22 |
0,8 |
0,68 |
6,0 |
0,7 |
5 |
0,98 |
1,8 |
0,18 |
0,8 |
1,1 |
0,58 |
0,6 |
20,0 |
0,87 |
6 |
2,0 |
2,4 |
0,10 |
0,10 |
1,8 |
2,2 |
0,06 |
6,0 |
70,0 |
7 |
1,2 |
2,6 |
0,16 |
0,12 |
1,1 |
2,0 |
0,01 |
6,0 |
80,0 |
8 |
1,4 |
2,8 |
0,14 |
0,14 |
1,0 |
2,5 |
0,06 |
6,0 |
90,0 |
9 |
1,2 |
2,0 |
0,20 |
0,20 |
1,2 |
2,7 |
0,10 |
5,8 |
70,0 |
10 |
1,5 |
2,2 |
0,12 |
0,16 |
1,8 |
3,5 |
0,08 |
6,2 |
80,0 |
Для исследования системы ЭП на устойчивость можно использовать критерий Гурвица. Для применения критерия Гурвица нужно получить ПФ замкнутой системы. Прежде получим ПФ разомкнутой системы, для этого нужно разомкнуть контур регулирования по обратной связи, при этом элементы системы электропривода будут соединены последовательно. Эквивалентную ПФ разомкнутой системы определяют произведением ПФ элементов системы АЭП
![]() ,
,
где а и b – коэффициенты, r – число элементов (звеньев) разомкнутой системы ЭП, n = 1, 2, 3…, m = 1, s=j, – круговая частота.
Затем для применения критерия Гурвица находят ПФ замкнутой системы АЭП, которую определяют по формуле
![]() ,
,
где Wп.ц(s) = Wр(s)Wум(s)Wг(s)Wд(s) – ПФ прямой цепи.
Знаменатель
ПФ Wзс(s)является
характеристическим уравнением. Критерий
Гурвица формулируется следующим образом.
Для того чтобы система автоматического
регулирования была устойчива, необходимо
и достаточно, чтобы при
![]() >0
все диагональные определители матрицы,
составленной по определенному правилу
из коэффициентов знаменателя
(характеристического уравнения) ПФ
замкнутой
системы
>0
все диагональные определители матрицы,
составленной по определенному правилу
из коэффициентов знаменателя
(характеристического уравнения) ПФ
замкнутой
системы
![]() ,
были больше нуля. Из критерия Гурвица
вытекает, что все коэффициенты
характеристического уравнения устойчивой
системы положительны.
,
были больше нуля. Из критерия Гурвица
вытекает, что все коэффициенты
характеристического уравнения устойчивой
системы положительны.
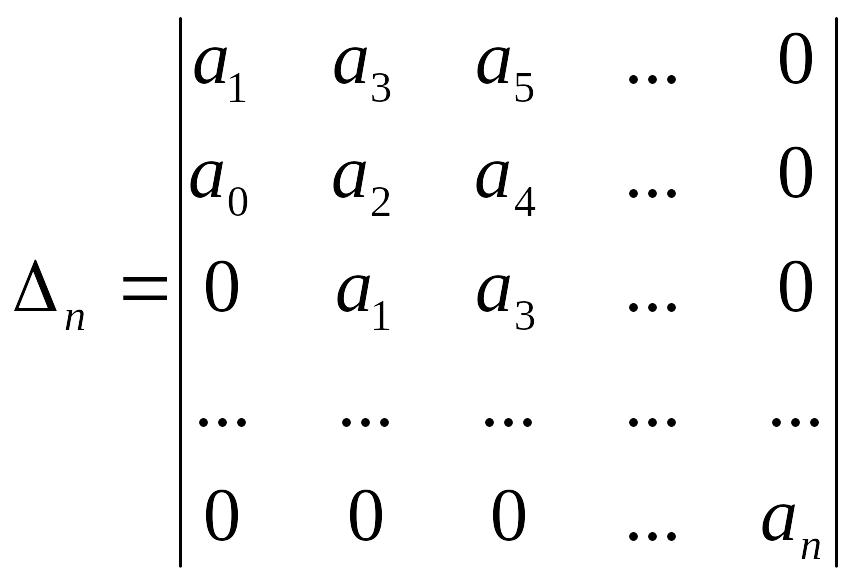
Правило составления определителя Гурвица сводится к следующему. Выписывают по главной диагонали все коэффициенты от a1 до an в порядке возрастания индексов. Дополняют столбцы вверх от коэффициентов диагонали, вписывая в столбец коэффициенты с последовательно возрастающими индексами. Вниз от коэффициентов диагонали дополняют столбцы коэффициентами с последовательно убывающими индексами. Вместо коэффициентов, индексы у которых могли бы быть больше n и меньше нуля, проставляют нули:
Для
иллюстрации метода составим определитель
для уравнения третьего порядка
![]() из ПФ
из ПФ
![]() (используется знаменатель):
(используется знаменатель):
 .
.
Диагональными определителями будут:
или
![]() .
.
Для устойчивости системы третьего и четвертого порядков необходимо и достаточно, чтобы: а) все коэффициенты характеристического уравнения были положительны; б) все определители матрицы Гурвица были больше нуля.
Для построения переходного процесса можно использовать среду программирования VisSim (MathCad, ASOTAR и др.) [3]. Пример использования программы VisSim для моделирования и исследования АЭП показан на рисунке 8. По полученному переходному процессу определяют устойчивость системы ЭП (ПП затухающий) и показатели качества.
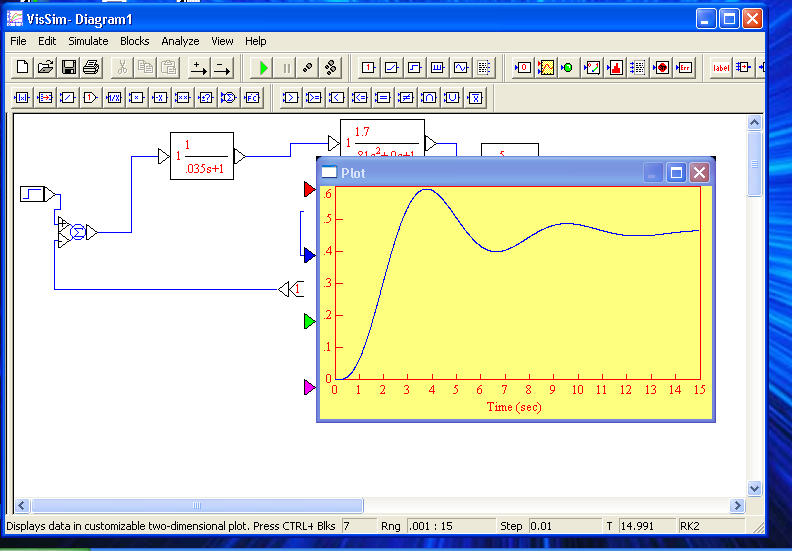
Рисунок 8 - Структурная схема электропривода с ДПТНВ в среде VisSim