17. Принципы технической реализации алгоритмов автоматического управления.
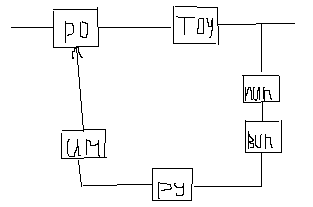
Совокупность устройств, обеспечивающая реализацию заданного алгоритма в замкнутом контуре будет называться регулятором. Для технической реализации одноконтурной АСР необходимо построить замкнутый контур регулирования с устройствами операторного управления и отображения информации позволяющая оператору вмешаться в работу.
Выигрыш качества регулирования от применения более сложных структур невысок, а процесс настройки становится многопарометричным и трудоемким. Реальная сложность структур требует увеличения диапазона скоростей и ускорений регулирующего воздействия, поэтому в промышленности используют регуляторы с числом настраиваемых параметров не выше 3-х.
18. Законы регулирования – п , пи, пид.

ПИД-закон применяется для управления сложными объектами, порядок которых 2 и выше.
И-закон приводит систему в колебательное состояние.
ПД-закон при работе со статическим объектом дает ошибку регулирования. В статике вторая составляющая закона равна нулю(т.е. Тп=0).
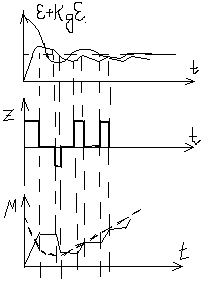
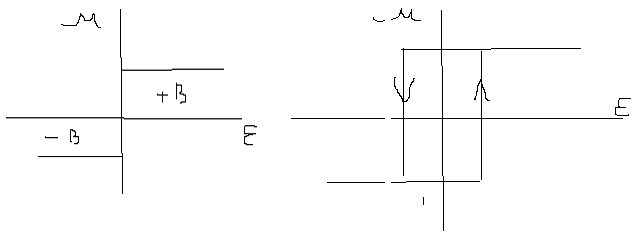
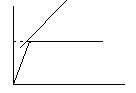
В промышленности широкое распространение получили позиционные регуляторы. Регуляторы, которые имеют несколько фиксированных воздействий. Широко используются двухпозиционные регуляторы. Статическая характеристика, которая имеет вид
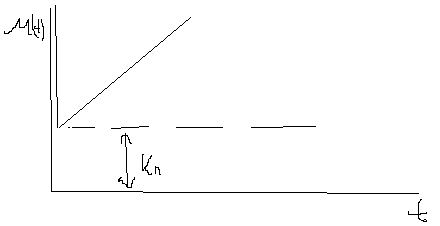
Бывают много позиционные регуляторы, которые в зависимости от требований установившихся состояний может быть больше чем три.
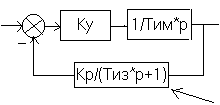
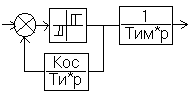
19. Структурная схема регуляторов с непрерывным выходом.
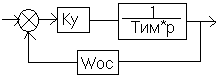
Для технической реализации алгоритмов управления не всегда удается достичь идеальности характеристик это обеспечивается, прежде всего, инерционностью ИМ, а также не возможностью реализации идеального диф. звена. Алгоритм коррекции характеристик исходных технических устройств в ведением ОС. Используются такие ОС при которых динамические свойства системы определяются главным образом свойствами ОС.(функциональная ОС) W=1/Wос
При работе на пропорциональный ИМ выход регулятора повторяет закон
регулирования.

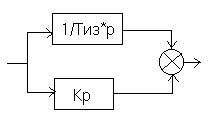
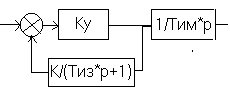
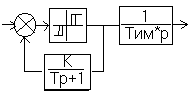
20. ПИ-регуляторы с непрерывным выходом.
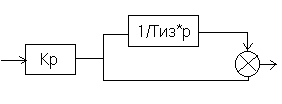
Здесь
необходимо определять ТИ.
Оно в данном случае опр-ся

Такие структуры работают на пропорц. исполнит. механизм, либо интегр. исполнит. мех. охваченный ООС.
 При
работе воздействия возникает неточность
за счет введения балансной составляющей
При
работе воздействия возникает неточность
за счет введения балансной составляющей

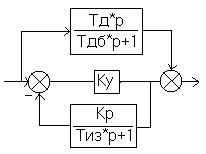
Если им-ся возможность ввести ООС по положению ИМ применяют функциональную ОС.(динамика ОС описывает динамику всей системы)
реальное диф-щее звено


С изменением настройки ТИЗ приходится изменять К, т.к. он связан с ТИЗ
Структура, к-рая учитывает интегрирующие св-ва ИМ:



реальн.

Балансная составляющая имеет и положит. сторону, т.к. она отфильтровывает высокие частоты и помехи во входном сигнале.
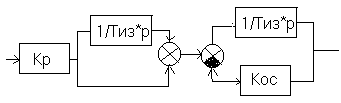
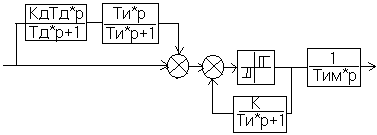
21. Структура пид-регуляторов с непрерывным выходом.
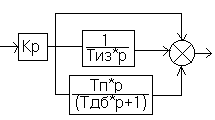
Такие сист. работают на пропорциональный ИМ или применяются в кач-ве регуляторов в каскадных системах.
При работе на интегрирующий ИМ исп-ся ОС, охватывающая эту структуру:
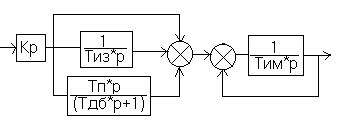
Либо вводят функциональную ОС по положению мех-ма


В силу неколебат. хар-ра перех. хар-ки ПИД-регуляторов звено 2-го порядка можно разложить на 2 полинома 1-го порядка и получим

Структура охваченная ОС реализует интегральную составляющую, к к-рой добавляется дифференциальная составляющая. Все это вместе- ПИД-регулятор.
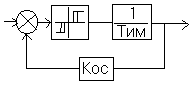
22. П-регуляторы с импульсным выходом.
Для формирования импульсов исп-ся трехпозиционный релейный элемент с зоной возврата. Если исп-ся ОС по положению ИМ, то структура системы может быть представлена след. образом:

![]() -зона
нечувст-ти
-зона
нечувст-ти
![]() -зона
возврата
-зона
возврата
Если
считать ОС функциональной, то передат
ф-ция всей цепи

Следовательно

ошибка

![]()
Когда
 происходит отключение ИМ
происходит отключение ИМ
Второй вариант без охвата ИМ обратной связью
Передат. ф-ция замкнутой части дифференцирования – пропорц. з-н регулирования.
23. ПИ-регуляторы с импульсным выходом
Здесь исп-ся функциональная ОС, охватывающая композиционный релейный элемент.
Если
 (половина зоны нечувст-ти ) происх. вкл-е
композиционного релейного эл-та .
(половина зоны нечувст-ти ) происх. вкл-е
композиционного релейного эл-та .
-зона нечувст-ти; -зона возврата

решение
ДУ

Обычно звено ОС реализуется на RC эл-тах при этом в регуляторах разделяют цепи заряда и разряда.
В автоколеб. режиме скважность импульсов опред-ся

![]() -длит-ть
импуьсов;
-длит-ть
импуьсов;
![]() -длит-ть
паузы
-длит-ть
паузы
Длит-ть
импульсов

зависит
от зоны возврата и разности скоростей
изменения сигнала функциональной ОС
![]() и
и
![]() изменения сигнала ошибки
изменения сигнала ошибки
![]()

Если
![]() имеет малую величину, то
имеет малую величину, то
![]()

 во
время паузы идет уменьшение сигнала
во
время паузы идет уменьшение сигнала
![]()
 тогда
тогда


 -скорость
связи
-скорость
связи
 ,где
,где

Средняя скорость

 -
ПИ з-н регулирования
-
ПИ з-н регулирования
24. ПИД-импульсный з-н регулирования
Структура имеет след. вид:


 =>
ПИД-з-н регулирования
=>
ПИД-з-н регулирования
При
ступенчатом изменении сигнала на входе
![]() (в нач. мом-т времени) включается ИМ и
одновременно начин. возрастать сигнал
функцион. ОС при этом
уменьш-ся до величины
(в нач. мом-т времени) включается ИМ и
одновременно начин. возрастать сигнал
функцион. ОС при этом
уменьш-ся до величины
![]() .
В этот момент ИМ отключился. Сигнал ОС
начин. уменьш-ся , но его уменьшение
происх. медленнее, чем изменение вх.
сигнала.
.
В этот момент ИМ отключился. Сигнал ОС
начин. уменьш-ся , но его уменьшение
происх. медленнее, чем изменение вх.
сигнала.