

41. Комплекс приборов и устройств «контур».
Основными приборами комплекса являются регулирующий прибор с импульсным вых. Р25, функциональная схема которого, выглядит след. образом:
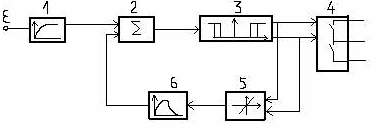
В состав блока входит измерительный субблок Р012, Р013 и ругулирующий субблок Р011. На выходе субблоков формируется сигнал ошибки в диапазоне -10 -- +10В. Р011 служит для формирования закона регулирования и совместно с ИМ постоянной скорости формирует ПИ-закон регулирования. Регулирующий субблок состоит из демпфера 1; РЭ 3; выходных ключей 4; усилителя ОС 5; и инерционного звена 6.
Сигнал ошибки поступает на демпфер и с него на вход суммирующего усилителя 2. Одновременно на вход усилителя 2 поступает сигнал ООС с выходного звена 6. Усиленный сигнал поступает на РЭ, выполненный в виде 2-х триггерных схем с регулируемой ∆нч. В зависимости от знака сигнала срабатывает один из триггеров РЭа. При этом на его выходе скачкообразно появляется сигнал, который управляет выходными ключами и поступает в цепь ОС. Однополярные сигналы на выходе РЭ преобразуются в 2-х полярный в ОУ 5. Коэффициент передачи усилка = 1. Апериодическое звено выполнено на высокоомном ОУ и RC-элементах.
Р25 имеет модификации Р25.1, Р25.2, Р25.3.
Р25.1 может работать с ДТП (напрямую).
Р25.2 позволяет непосредственно на вход подключать Тс.
Р25.3 подключ. термопары.
На лицевой панели блока Р25 установлен задатчик, переключатель режимов работы и тумблер ручного управления (дистанционного) ИМом. Выходная цепь прибора позволяет управлять различной коммутац-ой аппаратурой с помощь. сигнала 24 В постоянного тока или 220 В переменного тока, или непосредственно управлять ИМом
42. Функциональный состав и принцип действия усэппа.
УСЭППА представляет собой набор отдельных эл-ов каждый из которых может выполнять простейшую ф-ию преобразования сигнала.
В составе УСЭППА имеются пневматич. ёмкости, пневмосопр-ие, диф. делители давления, пневмотумблеры.
Пневмоёмкость - это эл-т, в котором накопление потенциала осущ-ся за счёт изменения давления в замкнутом объёме.
Различают постоянные и переменные ёмкости. Пост. ёмкость предст. собой цилиндр с двумя штуцерами для подключения.
 На
схемах пневмоёмкость обозначается:
На
схемах пневмоёмкость обозначается:
![]()
![]() .
.
Пневмосопр-я предн-ны для создания перемещ-я течением воздуха. Подразд-ся на пост- ое, перемен-ое, управляемые.
Они предст-ют собой трубки длиной 7-20 мм диаметром 0,18-0,5 мм.
![]() на
схемах:
на
схемах:
![]()
Переменные пневмосопр-я могут изменять длину в опред. пределах.
![]() на
схемах:
на
схемах:
![]()
Управляемые пневмосопр-я – это сопр-я, вел-на к-ых может измен-ся под действием какого-либо параметра.
Наиб. распр-ми явл-ся упр. сопр-я типа «сопло-заслонка» или «сопло-шарик».
43. Пневматические усилители давления (эл-ты сравнения).
Усилитель давл-я строится с использ-ем двухсоплового механо-пневматич. преобр-ля.
В состав УСЭППА входят трехмембр-е пневмоусилители с 2-мя входами и пятимембр-е пневмоусил. с 4-мя входами.
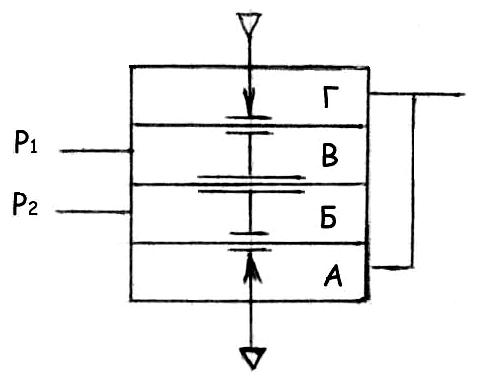
3-х мембр. пневмоусилитель.
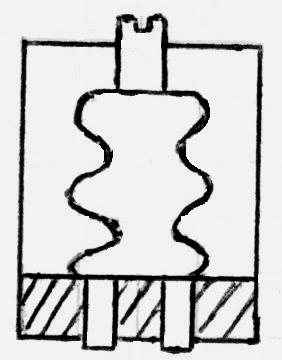
Двух ходовой 3-х мембранный пневмоусилит. сост-ит из 2-ух пневмосопр-ий типа сопло - заслонка 1-3 2-4 , мембр-го блока 5 образ-го вместе с корпусом глухие камеры.
Мембр. блок содержит 3 эластичн. мембраны 6, 7, 8, соед-го общим штоком, торцы к-го служат заслонками для сопел 1 и 2.
Мембр. блок может перемещ-ся в вертик-ном напр-ии. Движ-я его ограничены упором.
Эф-ная площадь мембран 6 и 8 равны м/д собой и значительно выше эф-ной площади мембраны 7.
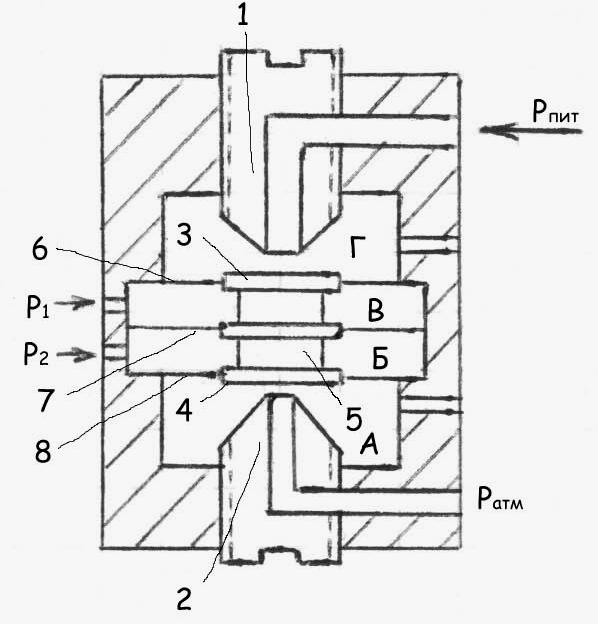
Камеры А и Г, в которых располагается сопло соединяются последовательно и обр. тем самым проходную камеру с 2-я управляемыми пневмосопр-ми.
К соплу 1 ч/з штуцер подводится давление питания, а сопло 2 связано с атмосферой. Входное давление Р1 и Р2 подводятся к камерам В и Б. Из-за различия эф-ых
п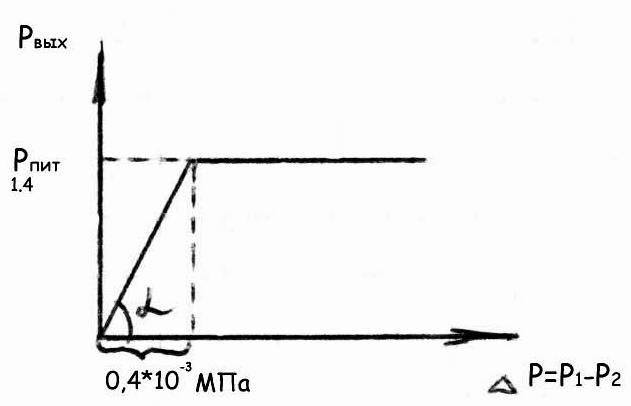 лощадей
мембран обр-их глухие камеры В, Б. При
увел-ии давления на входе Р1 мембр. блок
будет смещаться в низ, т.к. эф-ая площадь
мембр. 7 больше эф-ой площади мембр.6.
лощадей
мембран обр-их глухие камеры В, Б. При
увел-ии давления на входе Р1 мембр. блок
будет смещаться в низ, т.к. эф-ая площадь
мембр. 7 больше эф-ой площади мембр.6.
При увел-ии давления в камере В давление на выходе будет расти.
Статич. хар-ка 3-ёх мембр. пневмоусил-ля:
Глухую камеру Б наз. отрицат-ой, а камеру В положит-ой.
На принципиальных схемах 3-х мембр. усилит. обозн-ся след. образом:
Если вх. давл-е Р1 > Р2, то на выход. устанавл-ся давл-е питания Рпит.
Если Р2>Р1, то на вых. устанавл-ся Ратм (0).
![]()
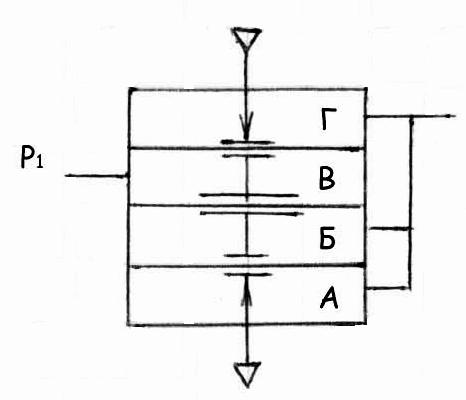
Ввели отрицат. обрат. связь:
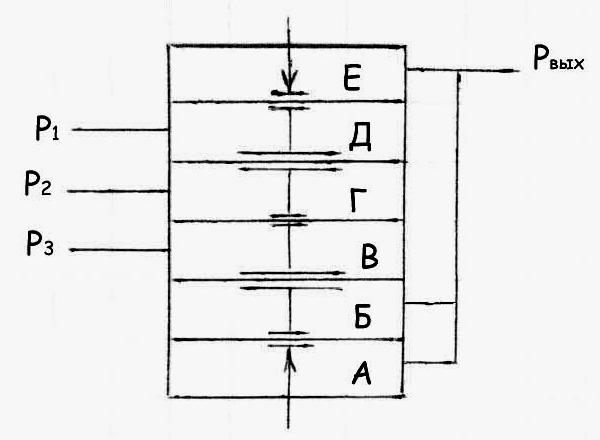
В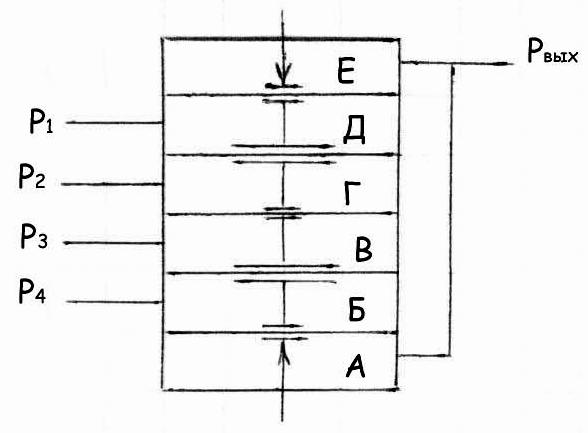 5-ти мемдр-ом усилит. будет 5 мембран
и 6
камер.
Коэф-т усиления 5-ти мембр-го < коэф-та
усиления 3-х мембр-го.
5-ти мемдр-ом усилит. будет 5 мембран
и 6
камер.
Коэф-т усиления 5-ти мембр-го < коэф-та
усиления 3-х мембр-го.
Глухие камеры Б В Г Д служат для подачи сигналов.
Сравнивает Р1+Р3 с Р2+Р4.
Если Р1+Р3>Р2+Р4, то на вых. Рпит.
Если Р1+Р3<Р2+Р4, то на вых. Ратм.
Введём ООС:
![]()