

1.6.2 Определение длины волны
Основным аргументом при оценке ситуации на качке является длина волны λ. Если она не была измерена непосредственно по наблюдениям волнения, то может быть рассчитана по измеренному периоду волнения:
λ = 0,514.(С+Vq) τк,
где λ – длина волны, м;
С — скорость волны, уз; выбирается из табл.1б [16] вначале по приближенно принятой λ′, затем по уточненным в процессе расчетов ее значениям;
Vq = V cos qB — скорость судна навстречу волне, уз; находится по номограмме (рис1.15);
qB — курсовой угол волн, под которым судно встречает фронт волны;
τк — измеренный кажущийся период волн, с.
Например, при V = 10 уз, qВ = 60°, Н = 20 м и τк = 8 с:
по номограмме для V = 10 уз и qВ = 60° находим Vq = +5,0 уз;
из табл.16 по H = 20 м и грубо принятой, например, λ′ = 50 м выбираем C' = 17,2 уз;
рассчитываем уточненное значение λ" = 0,514(17,2 + 5,0) 8 = 91 м;
4) по табл.16 по округленному значению λ" = 90 м и Н = 20 м уточняем значение C" = 21,7 уз, после чего рассчитываем
λ′" = 0,514(21,7 + 5,0) 8=110 м;
5) по табл.16 по λ′"= 110 м и Н = 20 м снова уточняем C"' = 23,0 уз и рассчитываем
λ = 0,514(23,0 + 5,0) 8= 115 м.
Это значение и принимаем за окончательный результат.
Примечание. При попутном волнении иногда могут получиться два равнозначных ответа. Многозначность разрешается при расчетах с другим τк, измеренным при измененных V и qВ.
1.7. Зона пониженной остойчивости (зпо)
При плавании судна в шторм оно периодически может находиться в разных положениях относительно волны:
-на гребне,
-на подошве,
-на подветренном или наветренном склоне волны.
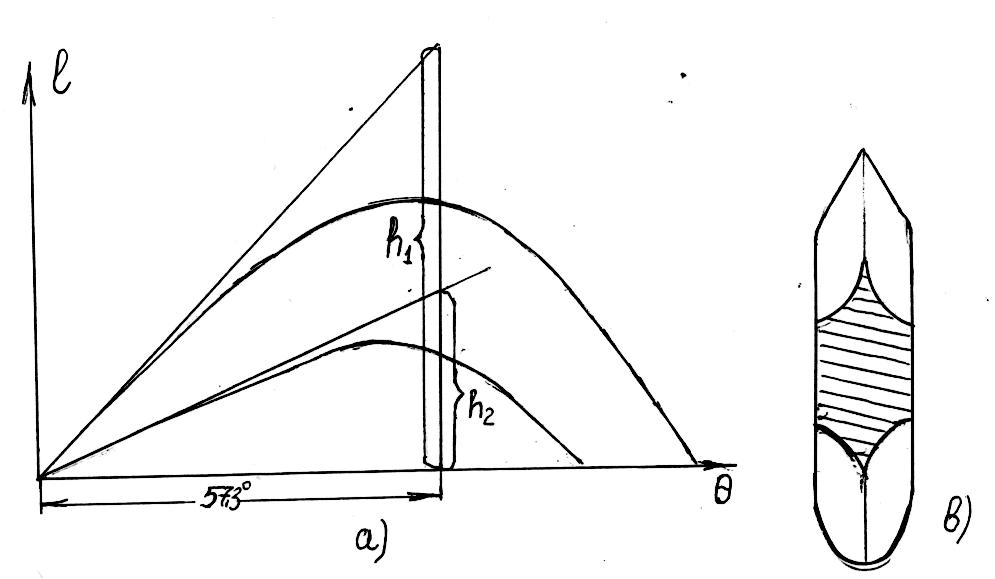
Рис. 1.12. Изменение остойчивости судна при L.
Это проявляется особенно сильно, если размеры судна соизмеримы с длиной волны. При размещении судна на нескольких подошвах или гребнях одновременно, когда L≥. понижения остойчивости не наступает. Аналогично не снижается остойчивость при любом положении маленького судна на большой волне при L<<. Положение судна на гребне волны при размерах L= ставит его в состояние пониженной остойчивости из-за уменьшения площади действующей ватерлинии, (рис.1.12 б).
При этом может резко измениться диаграмма статической остойчивости. Она становится намного ниже диаграммы остойчивости при положении судна на подошве волны или при спокойной воде, а значит, изменится метацентрическая высота (рис. 1.12а).
Условия, при которых судно находится в зоне пониженной остойчивости (ЗПО) являются:
1.![]() (1.28)
(1.28)
2.![]() (1.29)
(1.29)
-это условие означает движение судна на попутной волне, когда его корпус располагается перпендикулярно фронту волны или близок к этому положению ( 12). На универсальной диаграмме Ремеза Ю.В. это движение судна в секторе II, IV.
3.
![]() и
и
![]() (1.30)
(1.30)
это условие означает движение судна со скоростью бега волны, когда оно «оседлавши» гребень волны перемешается вместе с фронтом волны, т.е. бесконечно долго находится на гребне волны в состоянии пониженной остойчивости. Такое положение соответствует «идеальному» положению судна в ЗПО (состоянию пониженной остойчивости).
На
практике для средних и крупнотоннажных
промысловых судов и большинства
транспортных тихоходных судов положение
-практически
недостижимо, так как при
![]()
![]() узлов.
узлов.
Положение
соответствующее
![]() ,
показаны на УДК пунктирной линией, так
при =100
м.
,
показаны на УДК пунктирной линией, так
при =100
м.
![]() получим
получим
Кривые ниже этой линии соответствуют видимым периодам , когда судно обгоняет волну. Предупреждение: промысловые суда средне и даже мало тоннажные могут достигать условий: при волнении на мелководье, за счет резкого уменьшения при этом величин и V.
На практике и научными исследованиями установлено, что судно может потерять остойчивость, если будет находиться на гребне волны даже в течении только 2-х периодов собственных бортовых колебаний. [27] Поэтому в задачах определения ЗПО считают, что судно уже находится в зоне пониженной остойчивости, если ´2Т1.
Определение положения судна в ЗПО может осуществляться тремя способами.
1.Аналитически вопрос о положении судна в ЗПО решается определением положительной величины VЗПО в узлах по формуле:
![]() (1.31)
(1.31)
2.По
универсальной диаграмме качки графическое
решение заключается в проведении
вертикали ЗПО из точки пересечения
![]() и
и
![]()
V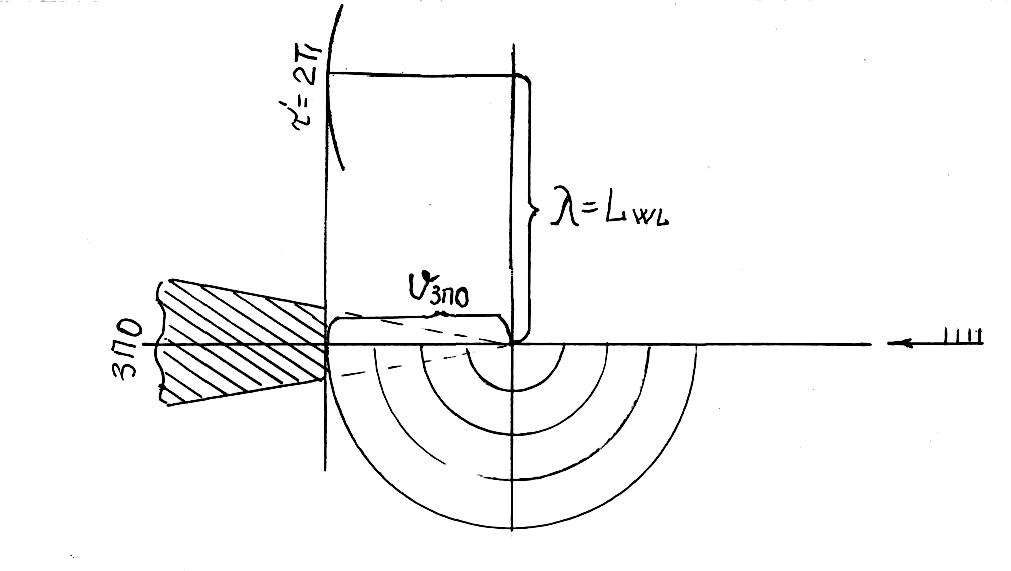
Рис.1.13. Определение ЗПО по УДК
Вертикаль ЗПО показывает правую границу скорости судна с условием его нахождения в ЗПО. Для промысловых и транспортных судов левая граница выхода из ЗПО практически недостижима.
3.При использовании маневренного планшета ЗПО получают расчетом величины относительной скорости:
![]() (1.32)
(1.32)
Для получения VЗПО (скорости попадания в (ЗПО)) откладывают UЗПО от конца вектора C к центру планшета. Вектор из центра планшета до полученной точки дает VЗПО в масштабе построения. Естественно, что при всех вышеназванных расчетах для попадания судна в ЗПО необходимо соблюдение первых двух условий, а именно: LWL; КК=КПбв18012 или КК=КПсг12. Третье условие =2ТΘ заложено в решении.