

1.7. Лишние степени свободы, пассивные связи и их влияние на работоспособность машин
Если результаты, полученные по структурным формулам, не соответствуют реальной степени подвижности механизма, то это может свидетельствовать о наличии в механизме лишних степеней свободы или пассивных связей.
Пример механизма с лишней степенями свободы представлен на рис. 1.13,а. На рис. 1.13,а показан сдвоенный параллелограмм, в схему которого введено дополнительное звено AB = CD. (ОА = BE, AC = CD).
По формуле Чебышева имеем:
![]() .
.
В действительности степень подвижности механизма W =1, т.к. при заданном движении звена 1 остальные движутся вполне определенно. Дополнительное звено АВ в силу особого выбора размеров звеньев (фигуры ACDB и ОАВЕ являются параллелограммами) не налагается новых связей. Такие звенья и кинематические, которые они образуют, называют пассивными условиями связи.
На рис. 1.13,б показан механизм с пассивной связью. В этом механизме пассивной связью является звено 2.
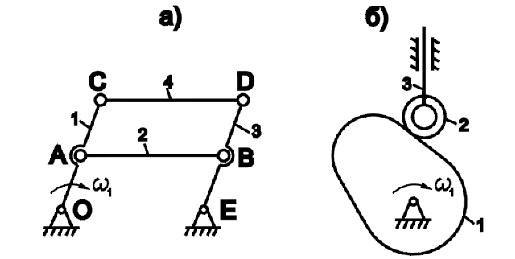
Рис. 1.13. Кинематические схемы механизмов.
а) – рычажный механизм с пассивной связью; б) – кулачковый механизм с лишней степенью свободы.
У кулачкового механизма (рис.1.13,б) по
формуле Чебышева
![]() ,
,
хотя движение толкателя 3 полностью определяется движением кулачковой шайбы 1. Лишняя степень свободы появилась из-за возможности произвольного вращения ролика 2 вокруг своей оси. Она не влияет на кинематику толкателя. Введение в конструкцию ролика позволяет уменьшить трение в высшей кинематической паре, а, следовательно, и ее износ.
Избыточные связи могут возникать в плоских механизмах также из-за погрешностей изготовления и монтажа звеньев, приводящих к перекосам осей кинематических пар. При этом плоский механизм фактически превращается в пространственный. Количество избыточных связей в плоских механизмах, возникающих из-за перекоса осей равно
q = WПЛ – WПР,
где WПЛ, WПР – степени подвижности механизма, рассчитанные соответственно по формулам (1.1), (1.2).
Чем больше число избыточных связей q, тем менее надежно работает механизм.
Пусть плоский механизм с четырьмя вращательными парами (n =3, р5 = 4, WПЛ = 1, рис. 1.14,а) из за неточностей изготовления (например, вследствие непараллельности осей О и С) оказался пространственным. Для пространственного механизма WПР = 6 х n – 5х р5 = 6х3 – 5х4 = –2. Количество избыточных связей q = 1 – (–2) = 3. Для образования механизма без избыточных связей нужна другая структурная схема, например, изображенная на рис. 1.14,б, где n =3,
р5 = 2, р4 = 1, р3 = 1, WПР = 6 n – 5 р4 – 4 р5 – 3х р3 = 6∙3 – 5∙2 – 4 – 3 = 1.
Рис. 1.14. К образованию механизма без избыточных связей.
а – механизм с избыточными связями; б – механизм без избыточных связей.
1.8.* Замена в плоских механизмах высших пар кинематическими цепями, содержащими низшие пары.
В общем случае плоский механизм состоит из звеньев, входящих в пары 4-го и 5-го классов. Многие методы решения самых разнообразных задач применимы для плоских механизмов, которые содержат звенья, входящие только в пары 5-го класса. Чтобы применить эти методы для механизмов, содержащих и пары 4-го класса необходимо пары 4-го класса на чертеже заменить кинематической цепью, в которой имеются только пары 5-го класса. Таким образом, любой плоский механизм на чертеже может быть представлен после замены как механизм, состоящий из звеньев, входящих только в пары 5-го класса. Не следует думать, что пары 4-го класса чем-то не удовлетворяют при эксплуатации машины. Они также широко распространены в машинах, как и пары 5-го класса. Например, все виды зубчатого зацепления представляют собой пары 4-го класса.
Замену можно произвести на следующих условиях:
а) число степеней подвижности механизма после замены не меняется;
б) относительное движение звеньев механизма сохраняется.
Если профили звеньев пары 4-го класса представляют собой кривые переменной кривизны (рис. 1.15 а), то в рассматриваемый момент отыскиваем центры кривизны этих кривых A и B, располагающихся на нормали N-N. Радиусами кривизны r1 и r2 проводим две окружности.
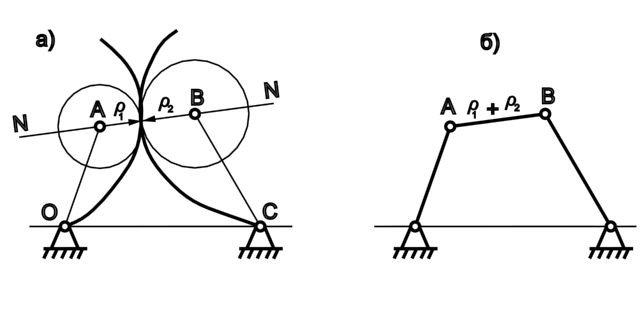
Рис. 1.15. Замена высшей пары кинематической цепью с низшими парами
В том случае, когда профилем одного из звеньев пары 4-го класса является точка (рис 1.17, а, точка В), в заменяющем механизме одна из пар, в которую входит заменяющее звено, совпадает с этой точкой (рис 1.17, б).
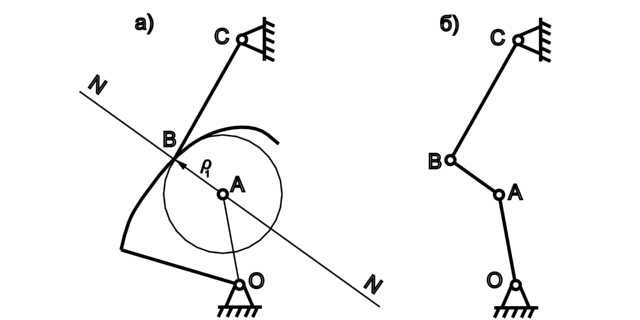
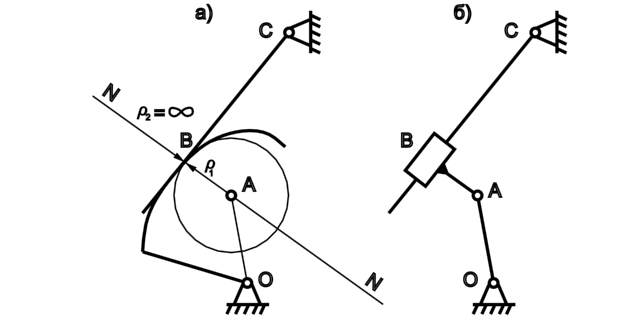
Рис. 1.16. Рис. 1.17.
Если же профиль одного из звеньев пары 4-го класса – прямая, то центр кривизны располагается в бесконечности (рис 1.16, а). Относительное вращательное движение с центром в бесконечности, можно представить как поступательное. Звено АВ, заменяющее пару 4-го класса, в этом случае входит в поступательную и вращательную пары (рис 1.16, б).