

10.2. Расчетное уравновешивание неуравновешенных вращающихся масс расположенных в одной плоскости
Уравновешивание одной массы
Имеем звено, в котором на
расстоянии от оси вращения l1
располагается
неуравновешенная масса m1
(рис. 10.2). В общем случае звено может
вращаться с переменной скоростью, т. е.
кроме угловой скорости ω
будет иметь место
угловое ускорение ε. В результате
действуют две силы инерции: центробежная
Ри1
и касательная Рτ1..
Каждая из этих сил
будет восприниматься опорой О.
Модули этих сил
соответственно равны:
![]() ,
,
![]() .
Уравновесим вначале силу Ри1
введя дополнительную массу
т на расстоянии l
по линии действия силы Ри1.
.
Уравновесим вначале силу Ри1
введя дополнительную массу
т на расстоянии l
по линии действия силы Ри1.
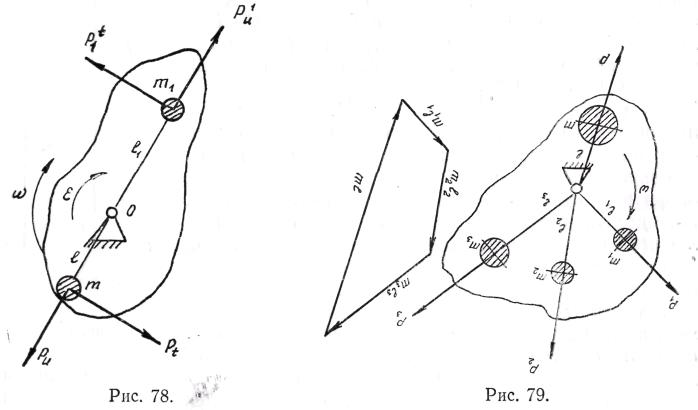
Рис. 10.2. Уравновешивание одной массы
Условие уравновешивания
Ри1+ Ри = 0. (10.1)
Подставив в уравнение (10.1) значение сил и сократив полученное после подстановки уравнение на общий множитель ω2, получим
m1l1 + ml = 0. (10.2)
Это и будет условие уравновешивания силы Ри1.
Следовательно, для того чтобы уравновесить центробежную силу, необходимо приложить дополнительную массу таким образом, чтобы сумма статических моментов дополнительной массы и неуравновешенной массы относительно оси вращения равнялась нулю.
С приложением дополнительной массы т возникает не только центробежная сила Pи, но и касательная сила, равная по модулю Pt = m ε l.
Условие (8.2) умножим на ε, тогда векторная сумма m1εl1 + mεl = 0 или
Рτ1 + Рτ = 0. Это есть условие равновесия касательных сил.
Следовательно, условие уравновешивания центробежных сил (10.2) вместе с тем является и условием уравновешивания касательных сил, т. е. полным условием уравновешивания массы т1. Значит, при уравновешивании масс необходимо уравновешивать центробежные силы инерции, касательные же силы инерции будут уравновешиваться автоматически. Поэтому в дальнейшем будем рассматривать только центробежные силы инерции.
Уравновешивание нескольких масс, расположенных в одной плоскости
Рассмотрим звено (рис. 10.3, слева), на котором располагаются три неуравновешенных массы т1, m2, m3 соответственно на расстоянии l1, l2, l3 от оси вращения О.
Задача для многих масс решается совершенно аналогично, поэтому в случае необходимости можно рассмотреть уравновешивание и большего числа масс. При вращении звена с угловой скоростью будут возникать центробежные силы инерции, равные соответственно по модулю
P1 = ω2 l1 m1; P2 = ω2 l2 m2; P3 = ω2 l3 m3.
Для устранения действия этих сил на опору О необходимо приложить дополнительную силу Р при условии, что Р 1 + Р 2 + Р 3 + Р = 0. Полагаем, что сила Р является результатом приложения массы т к звену па расстояние l от оси вращения, тогда P= ω 2 l m.
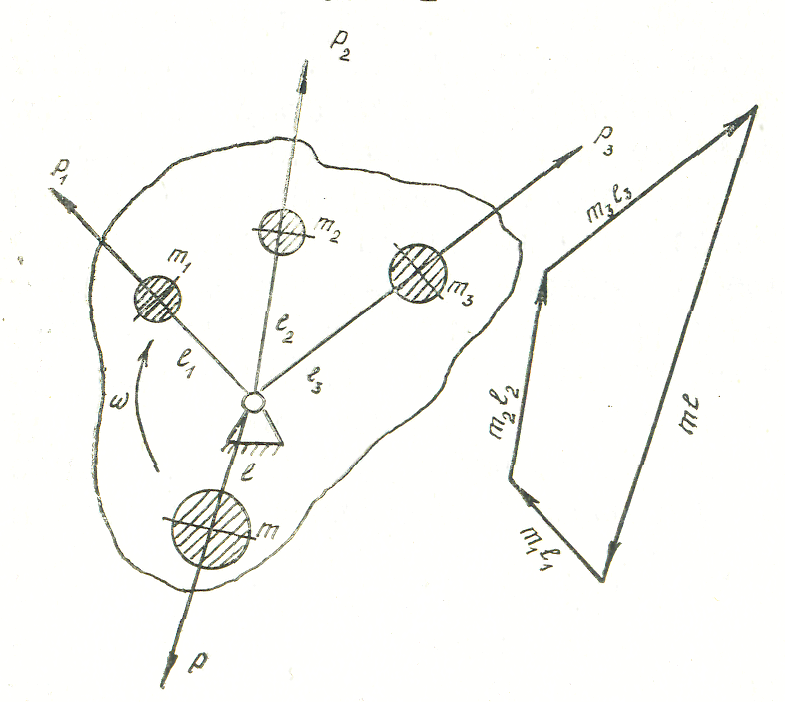
Рис. 10.3. Уравновешивание нескольких масс
Подставив в уравнение значения сил, и сократив полученное после подстановки уравнение на ω2, получим условие уравновешивания масс в виде векторной суммы статических моментов
m1 l1 + m2 l2 + m3 l3 +m l = 0. (10.3)
Неизвестный вектор m l определяем путем построения этого уравнения . Зная вектор m l, задавшись т, находим l или, задавшись l, отыскиваем т и располагаем их на звене (см. рис. 10.3, слева). Таким образом, несколько неуравновешенных масс, располагающихся в одной плоскости, можно уравновесить одной массой, располагающейся в той же плоскости.