

4.3.3. Алгоритмы силового расчета групп Ассура 2-го класса
Алгоритмы силового расчета группы Ассура 2-го класса различных видов представлены в нижеследующей табл. 4.1.
Таблица 4.1
Алгоритмы силового расчета групп Ассура 2-го класса .
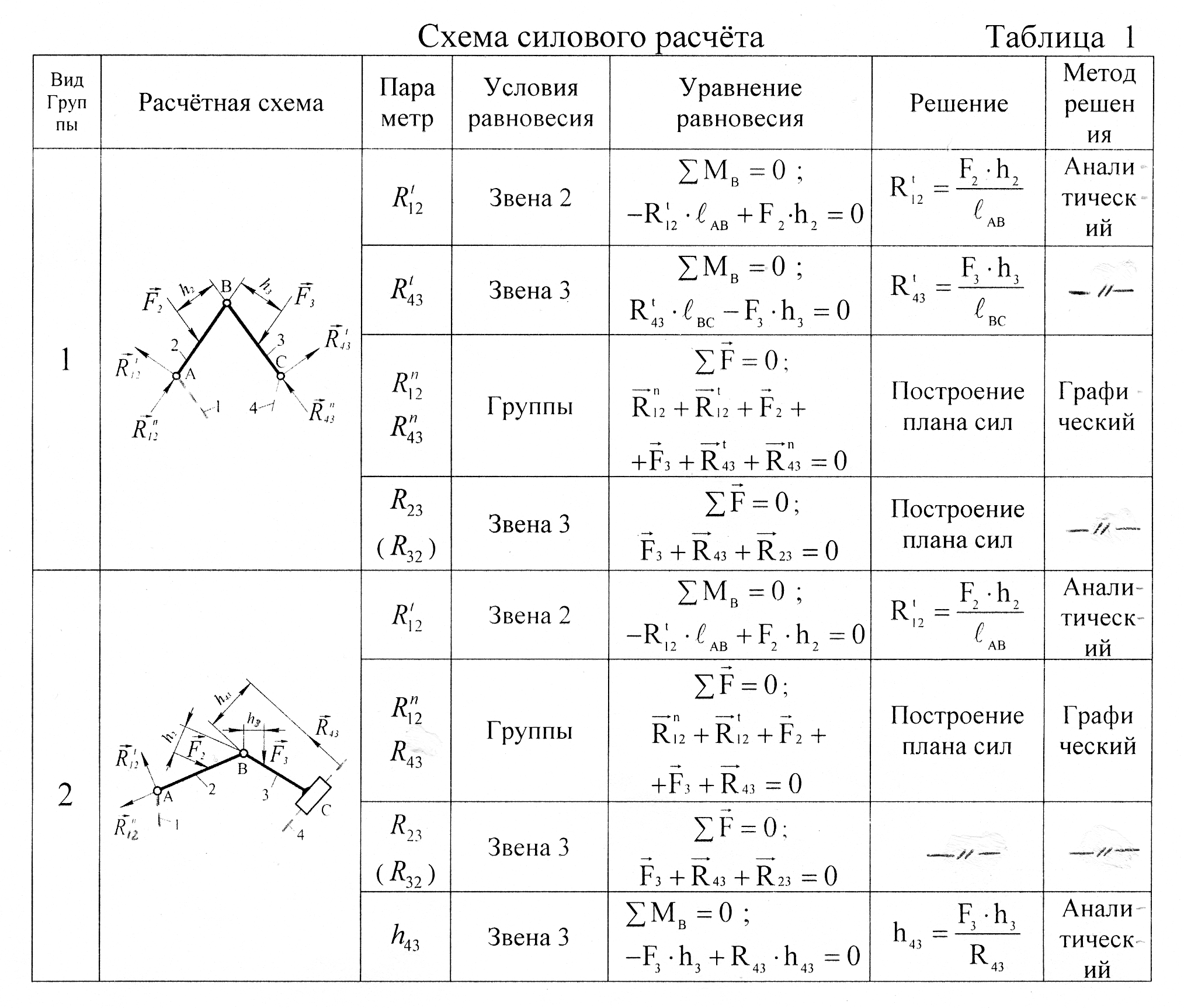
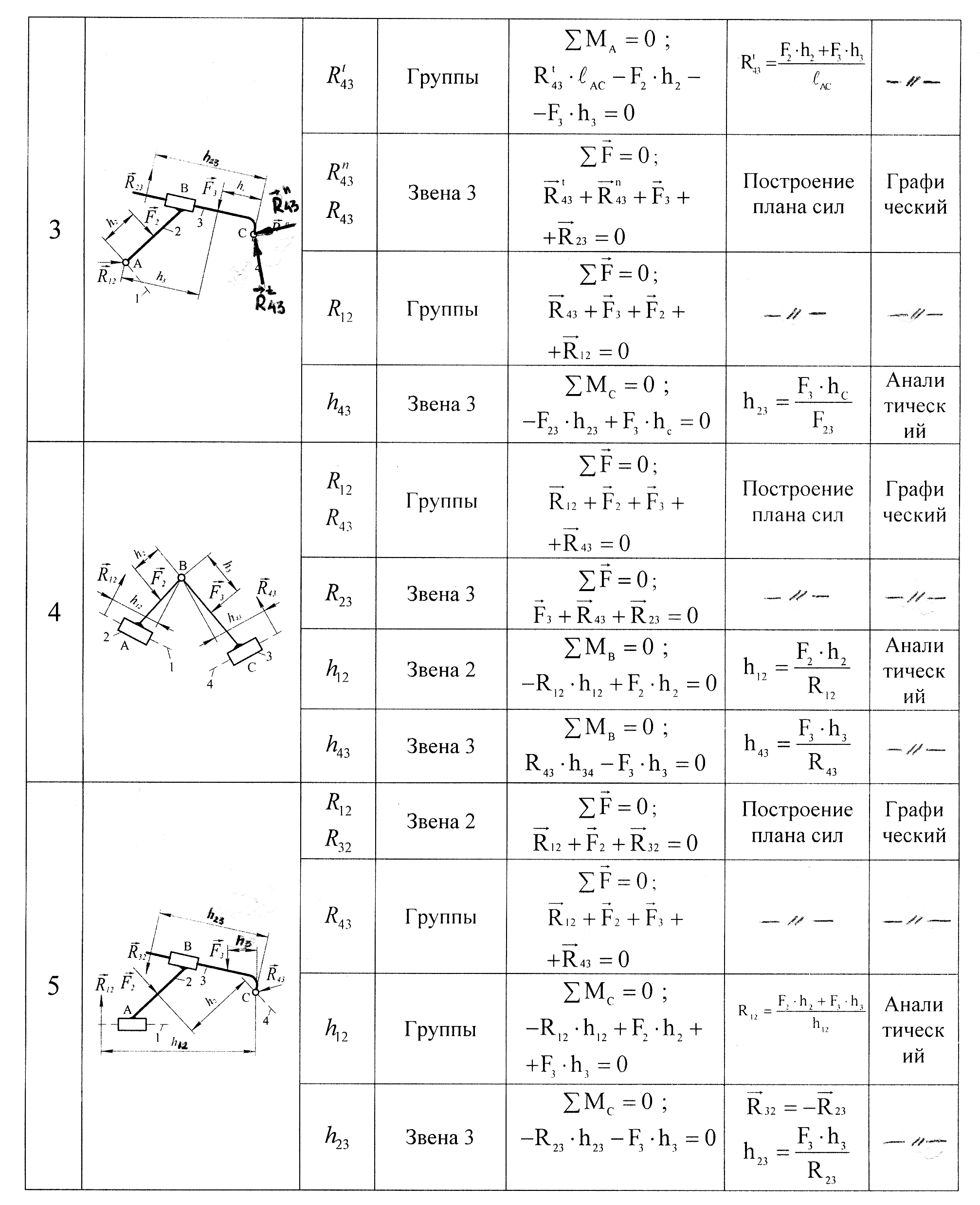
Сначала определяются все активные силы (силы тяжести звеньев, силы технологического сопротивления), а также силы и моменты сил инерции звеньев. Векторы этих сил прикладываются на план группы Ассура вычерченный в масштабе. В табл. 4.1 эти силы заменены их равнодействующими F1 и F2.
Затем прикладываются составляющие неизвестных реакций R12 , R43 , R23 в кинематических парах. Далее определяются неизвестные величины и направления реакций.
Лекция 6
4.4. Силовой расчет начального звена
В результате силового расчета всех групп, образующих механизм, была определена сила 1-2 воздействия кривошипа на смежное с ним звено.2. Сила действия звено 2-го звена на кривошип 1 равна
2-1 = – 1-2.
Движение начального звена 1 рабочей машины осуществляется двигателем через пару зубчатых колес (рис. 4.8,а), или при помощи муфты (рис. 4.8,б). В.первом случае воздействие привода на кривошип осуществляется уравновешивающей силой y, приложенной в полюсе зацепления P под углом зацепления α, во втором случае – уравновешивающим моментом My.
а
|
б
|
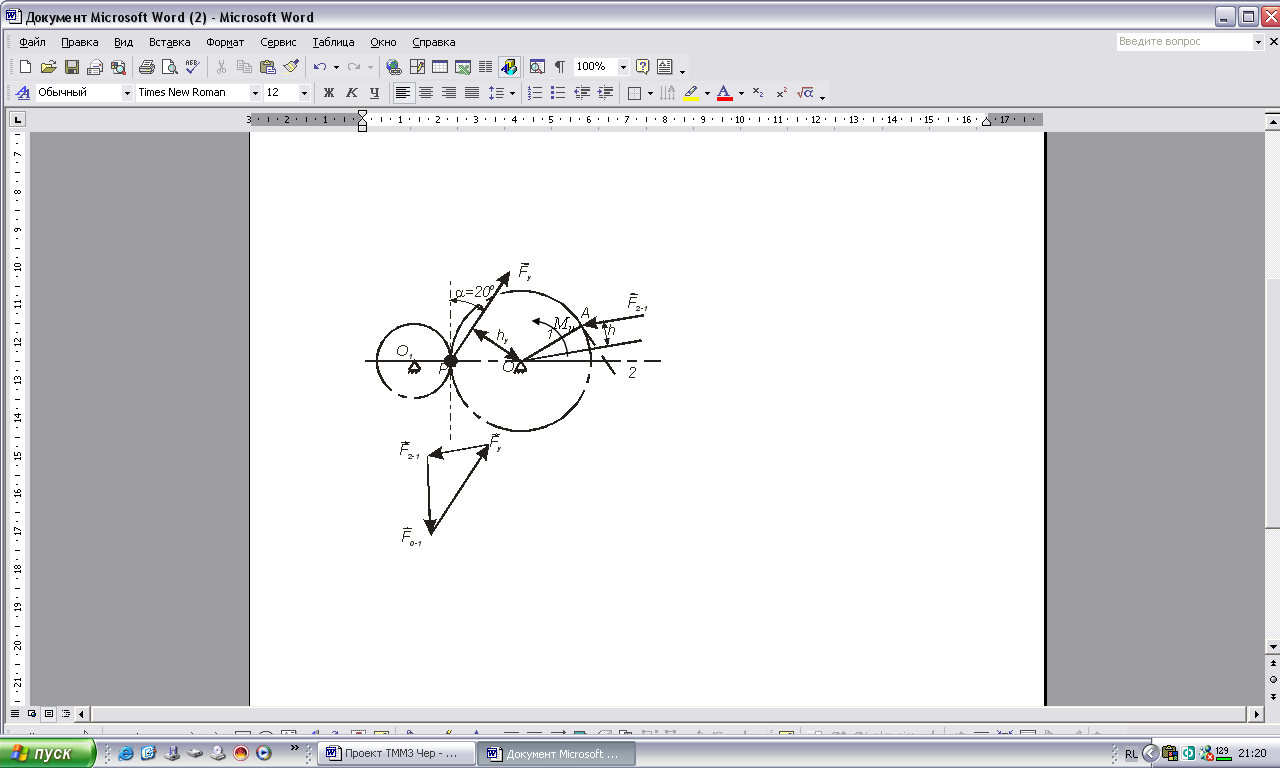
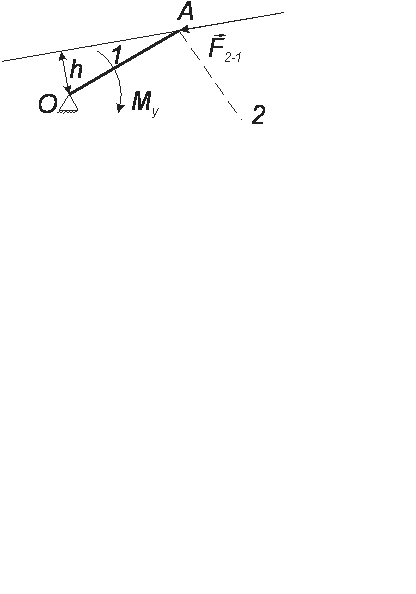
Рис. 4.8. Действие уравновешивающей силы Fy или уравновешивающего момента My на начальное звено: а – схема с передачей движения через зубчатые колеса; б – схема с передачей движения через муфту.
Рассмотрим первый случай, когда движение начального звена 1 осуществляется двигателем, через пару зубчатых колес (рис. 4.9,а). Звено вращается с угловым ускорением ε1.
Уравновешивающую силу определяем из уравнения равновесия ведущего звена, приравняв к нулю сумму моментов всех сил относительно точки O:
∑МО = Ми + μS (– F2-1 h1 – G1 h3 + Fи1 h2 + Fу hу) = 0.
Откуда Fу = [ F2-1 h1 + G1 h3 – Fи1 h2 ) – (Ми / μS )] / hу .
Рис. 4.9. Силовой расчет начального звена
Для определения F0-1 построим план сил (рис. 4.9,б) в соответствии с векторным уравнением, соблюдая масштабный коэффициент μF :
∑
=
у
+
![]() 1
+
2-1
+
и1
+
0-1
=0.
1
+
2-1
+
и1
+
0-1
=0.
4.4. Последовательность выполнения силового расчета
На рис. 4.10 показан механизм, состоящий из группы начальных звеньев, к которой присоединены группы Ассура ABCD и CE, с приложенными к ним силами. Установим последовательность силового расчета такого механизма.
 Рис. 4.10. Кинематическая схема шестизвенного
механизма, μS
= 0,01 м/мм .
Рис. 4.10. Кинематическая схема шестизвенного
механизма, μS
= 0,01 м/мм .
Если начать расчет механизма с начального звена ОА, то неизвестными окажутся силы в парах O и А. Кроме того, будет неизвестна уравновешивающая сила Fу, приложенная в зацеплении зубчатых колес. Таким образом, будет 5 неизвестных, так как векторы реакций в парах О и A определяются двумя неизвестными параметрами дают каждый (величиной и направлением). Для определения этих неизвестных можно составить только три уравнения статики, рассмотрев равновесие сил, приложенных к звену ОА. Следовательно, начинать расчет с начального звена нельзя. Если же начать силовой расчет с группы АВСD, то можно составить только 6 уравнений статики, неизвестных же будет 8 – составляющие реакций в парах A, В, С и D. Поэтому начинать силовой расчет с этой группы также нельзя.
Остается последняя группа СЕ, рассмотрев которую найдем векторы реакций 3-4 и 0-5 в парах С и Е. Это уже дает возможность решить задачу силового расчета группы AВСD, так как реакция 4-3 в паре C равна и противоположно направлена вектору 3-4. Затем можно переходить к расчету ведущего звена.
Следовательно, устанавливается вполне определенная последовательность силового расчета механизма. Начинается расчет с последней группы в порядке присоединения их к механизму 1-го класса, затем ведется расчет предпоследней группы и т. д. и заканчивается ведущим звеном.