

Программа работы
Изучить устройство асинхронных двигателей:
а) с короткозамкнутым ротором;
б) с фазным ротором.
Проверить наличие механических и электрических неисправностей.
Методом трансформации определить начала и концы обмоток.
Собрать схемы соединения статорных обмоток в звезду и в треугольник и осуществить пуски и реверсирование двигателя.
Теоретические сведения
Трехфазные асинхронные двигатели широко используются в производстве. Они просты по конструкции, надежны в эксплуатации, имеют высокий кпд.
Устройство. Двигатель состоит из двух частей: статора (неподвижная часть) и ротора (вращающаяся часть).
Статор включает в себя: чугунный или алюминиевый корпус, запрессованный в него магнитопровод, в пазах которого уложены три обмотки; два подшипниковых щита (боковые крышки). На статоре размещается клеммная коробка для присоединения проводов. У двигателя с фазным ротором на одном подшипниковом щите установлен щеткодержатель с щетками для соединения обмотки ротора с внешней цепью.
Ротор состоит из вала, магнитопровода и обмотки, которая бывает двух видов:
а) короткозамкнутая (в виде беличьего колеса, образуемого алюминиевыми стержнями в пазах магнитопровода, замкнутыми с торцов алюминиевыми кольцами);
б) фазная (выполняется аналогично обмотке статора из трех обмоток, начала которых сдвинуты по окружности ротора на 1200 и выведены на контактные кольца на валу ротора).
На валу ротора может устанавливаться вентилятор.
Магнитопроводы статора и ротора делаются из пакета листовой электротехнической стали толщиной 0,3-0,5 мм. Листы изолированы друг от друга слоем окалины или лака для снижения потерь мощности на вихревые токи и гистерезис (перемагничивание).
Маркировка выводов обмоток:
С1, С2, С3 – начала обмоток статора;
С4, С5, С6 – соответственно концы обмоток, статора;
Р1, Р2, Р3 – начала обмоток ротора.
В зависимости
от напряжения сети и исполнения обмоток
статора применяются две основные схемы
их соединения: в звезду (Y) и в треугольник
(![]() ).
На двигателе указывается линейное
напряжение сети и соответствующее ему
соединение обмоток.
).
На двигателе указывается линейное
напряжение сети и соответствующее ему
соединение обмоток.
Например, 380/220 Y/∆ – у этого двигателя номинальное фазное напряжение обмотки составляет 220 вольт.
На рисунках 10.1 приведены схемы включения двигателя с короткозамкнутым ротором, а на рисунке 10.2 – с фазным ротором.
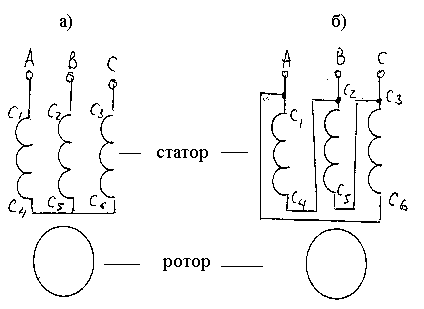
Рис. 10.1
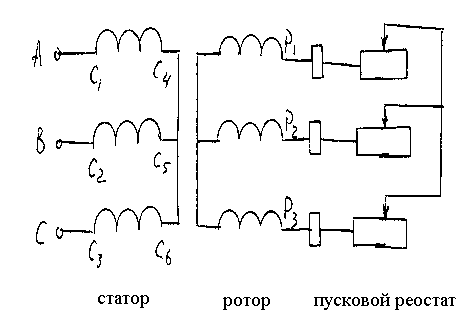
Рис. 10.2
Принцип работы. У асинхронных двигателей обмотки статора выполнены одинаково, а обмотки ротора закорочены или непосредственно на роторе (короткозамкнутый ротор) или через внешнее сопротивление (фазный ротор). Поэтому принцип работы одинаков.
В статоре двигателя создается вращающееся магнитное поле. Направление вращения определяется чередованием фаз (А, В, С) источника питания, а частота вращения n1 рассчитывается по формуле:
![]() (10.1)
(10.1)
где f1 – частота тока, Гц;
р – число пар полюсов.
При частоте тока 50 Гц имеем определенный ряд n1:
р |
1 |
2 |
3 |
4 |
… |
n1 об./мин. |
3000 |
1500 |
1000 |
750 |
… |
Магнитное поле статора пересекает обмотку ротора и наводит в ней ЭДС. Ее направление определяется правилом правой руки. В нижней части обмотки ротора она направлена от нас , в верхней – к нам ⊙ (рис. 10.3). Так как обмотка замкнута, по ней протекает ток. Теперь получаем проводник с током в магнитном поле. На такой проводник действует механическая сила F, направление которой определяется правилом левой руки. Как видно из рисунка, создается крутящий момент, приводящий ротор в движение, направление которого совпадает с направлением вращения магнитного поля статора. Поменяв местами две любые фазы от источника питания к статору, мы можем изменить направление вращения магнитного поля и двигателя.
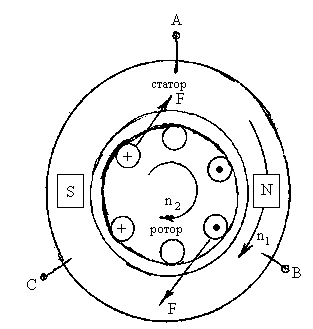
Рис. 10.3
Двигатель разгоняется, стремясь «догнать» магнитное поле статора. Но при равенстве скоростей прекратится пересечение магнитным полем статора обмотки ротора ЭДС, ток и крутящий момент будут равны нулю. Поэтому частота вращения ротора всегда меньше частоты вращения магнитного поля статора. Отсюда и название асинхронный.
Мера отставания частоты вращения ротора n2 от частоты вращения магнитного поля статора называется скольжением S и определяется выражением:
![]() .
(10.2)
.
(10.2)