

7.6. Управление мощной нагрузкой
Одной из схем управления нагрузкой является использование симистора - самый простой способ управления мощной нагрузкой под напряжением 220В с помощью МК (рис. 58).
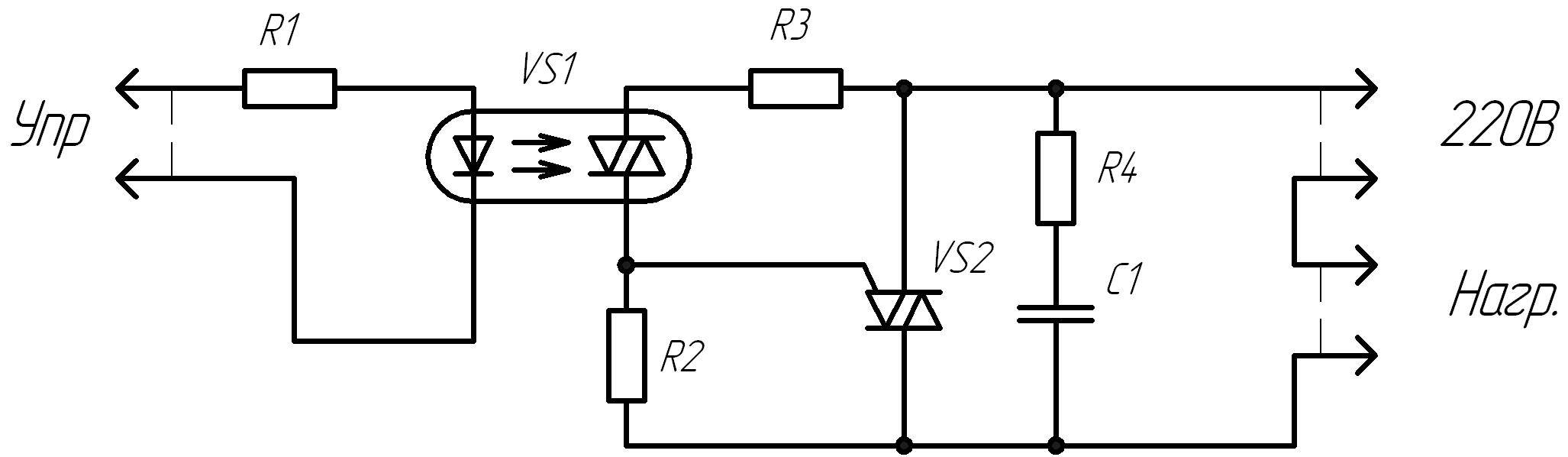
Рис. 58. Пример схемы подключения симистора к микроконтроллеру
Электрическую развязку цепей МК от высоковольтной нагрузки можно организовать с помощью оптосимистора MOC3063. При пропускании через входной светодиод включающего тока не более 10мА, встроенный детектор нуля сначала дождётся перехода сетевого напряжение через ноль и только после этого откроет выходной симистор.
Другая схема управления, нагрузкой с использованием полевого транзистора. Полевой транзистор – полупроводниковый прибор, в котором ток изменяется в результате действия перпендикулярного току электрического поля, создаваемого входным сигналом.
От биполярного транзистора полевой транзистор отличается, во-первых, принципом действия: в биполярном транзисторе управление выходным сигналом производится входным током, а в полевом транзисторе – входным напряжением или электрическим полем. Во-вторых, полевые транзисторы имеют значительно большие входные сопротивления, что связано с обратным смещением p-n-перехода затвора в рассматриваемом типе полевых транзисторов. В-третьих, полевые транзисторы могут обладать низким уровнем шума (особенно на низких частотах), так как в полевых транзисторах не используется явление инжекции неосновных носителей заряда и канал полевого транзистора может быть отделён от поверхности полупроводникового кристалла.
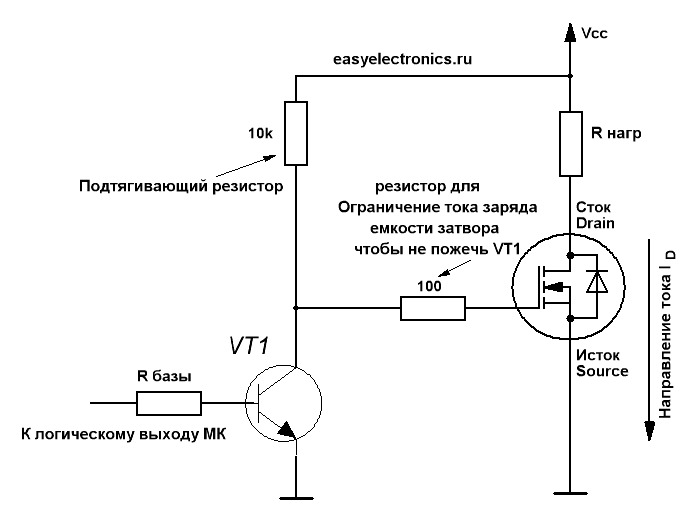
Рис. 58. Схемы подключения полевого транзистора к микроконтроллеру
Достоинство такой схемы подключения в следующем, на затвор подается напряжение, но так как там диэлектрик, то ток будет минимальным, а значит, требуемая мощность на управление этим транзистором будет минимальной. Одной из проблем подключения транзистора и МК является то, что для открытия полевого транзистора до полного насыщения необходимо на затвор подать большее напряжение, для этой цели к выводу МК подключается биполярный транзистор.
Для управления полевым транзистором можно применить специальную ИС IR2117, которая сама сформирует нужный управляющий сигнал и выровняет уровни между контроллером и транзистором. Пример подключения ИС IR2117 представлен на рис. .
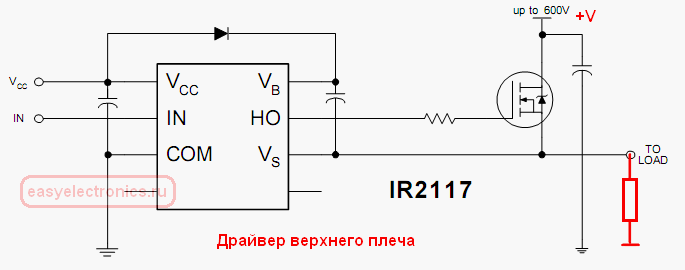
Рис. 58. Пример схемы подключения полевого транзистора к микроконтроллеру
Лекция 8 Цифровая обработка сигналов
Цифровая обработка сигнала (ЦОС) – это арифметическая обработка в реальном масштабе времени последовательности значений амплитуды сигнала, получаемых через равные временные промежутки.
Первый процессор цифровой обработки сигналов (ПЦОС) - TMS320C10 был выпущен компанией Texas Instruments Inc. в 1982 году и благодаря целому ряду удачных технических решений сразу получил широкое распространение.
Реальные сигналы, как правило, являются аналоговыми (речь, музыка, информация с датчиков). Обработка сигналов может производиться аналоговой и цифровой системами. Достоинства цифровых систем обработки информации и сигналов общеизвестны, и в данной книге не обсуждаются. Общая структура цифровой системы обработки информации приведена на рис. 59.

Рис. 59. Система цифровой обработки сигнала
АЦП формирует из аналогового сигнала цифровой. ЦАП осуществляет обратное преобразование цифрового сигнала в аналоговый. Последнее преобразование не требуется в системах, где на основе обработки сигнала выносится некоторое решение, и нет необходимости восстанавливать исходный аналоговый сигнал. Порты ввода/вывода осуществляют ввод цифрового сигнала для обработки в вычислителе и при необходимости, вывод результатов. Если цифровой вычислитель и источник сигнала (или получатель сигнала) разнесены территориально, в систему обработки входят устройства передачи сигнала по каналам связи, причем может передаваться как цифровой (с выхода АЦП по цифровым каналам связи), так и аналоговый сигнал. В последнем случае на вход АЦП поступает сигнал из канала связи.