

5.3. Запоминающее устройство FlashRom
Постоянное запоминающее устройство FlashROM предназначено для хранения кодов команд программы и констант. Ячейка памяти содержит 16 разрядов.
Программирование может выполняться с использованием дополнительного источника напряжения +12 В или без использования дополнительного источника. Последовательное программирование без использования дополнительного источника напряжения производится с использованием трех выводов МК и может выполняться после установки МК в аппаратуре, где ему предстоит работать. Данный способ реализуется с помощью ISP интерфейса. Регистр управления памяти EEPROM – EECR, регистр данных памяти EEPROM – EEDR, регистр адреса памяти EEPROM (младший байт) – EEARL, EEARH – регистр адреса памяти EEPROM (старший байт).
5.4. Периферийные устройства
В группу периферийных устройств входят: параллельные порты ввода-вывода; последовательный синхронный стандарт передачи данных в режиме полного дуплекса SPI; последовательный универсальный асинхронный приёмопередатчик UART; последовательный порт I2С; таймеры-счетчики общего назначения; сторожевой таймер; аналого-цифровой преобразователь; аналоговый компаратор; программируемый аппаратный модулятор; блок прерываний.
Внешний вид микросхемы АТх8515, представлен на рис. 36.
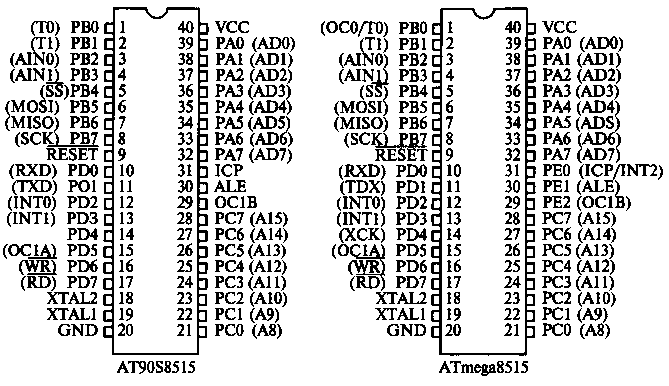
Рис. 36. Функции выводов микроконтроллеров АТх8515
Параллельный порт ввода-вывода (Port, P) предназначен для ввода и вывода данных. МК семейства AVR имеют от одного до шести портов и для передачи данных предназначены следующие регистры: PIND – Выводы порта D; DDRD – Регистр направления передачи данных порта D; PORTD – Регистр данных порта D; PINC – Выводы порта С; DDRC – Регистр направления передачи данных порта С; PORTC – Регистр данных порта С; PINB – Выводы порта В; DDRB – Регистр направления передачи данных порта В; PORTB – Регистр данных порта В; PINA – Выводы порта А; DDRA – Регистр направления передачи данных порта А; PORTA – Регистр данных порта А. Порт может иметь от трех до восьми выводов.
Последовательный порт ввода-вывода имеющим протокол SPI предназначен для ввода и вывода байтов при обмене данными с другими устройствами, имеющими протокол SPI. Обмен выполняется под управлением тактового сигнала порта. Максимальная скорость приема/передачи (в битах в секунду) равна 1/4 частоты тактового сигнала МК. Для управления последовательным портом предназначены следующие регистры: SPCR – регистр управления интерфейсом SPI; SPSR – регистр состояния протокола SPI; SPDR – регистр ввода/вывода данных протокола SPI.
Последовательный порт ввода-вывода UART предназначен для передачи и приема байтов данных по двухпроводным линиям связи (например, по интерфейсу RS-232C или «токовая петля»). Прием и передача могут вестись одновременно через следующие регистры: UBRR – Регистр скорости передачи данных через UART; UCR – Регистр управления приемопередатчиком UART; USR – Регистр состояния приемопередатчика UART; UDR – Регистр данных приемопередатчика UART.
Последовательный порт ввода-вывода TWSI (Two-Wire Serial Interface) предназначен для обмена байтами данных с другими устройствами по двухпроводной шине I2C. К шине могут подключаться до 127 устройств.
Таймер-счетчик общего назначения (General Purpose Timer/Counter) предназначен для формирования запроса прерывания при истечении заданного интервала времени (режим таймера) или свершении заданного числа событий (режим счетчика). МК семейства AVR могут иметь от одного до трех 8- или 16- разрядных таймеров/счетчиков общего назначения.
Таймер/счетчик общего назначения может выполнять дополнительные функции: функцию захвата; функцию сравнения; функцию ШИМ; функцию счета реального времени.
Функция захвата заключается в запоминании кода, сформированного в базовом счетчике, в специальном регистре захвата при изменении значения определенного внешнего или внутреннего сигнала. Регистр захвата таймера/счетчика Т/С1 (младший байт) – ICR1L, регистр захвата таймера/счетчика Т/С1 (младший байт) – ICR1H.
Функция сравнения заключается в изменении значения сигнала на определенном выходе МК при совпадении кода, формируемого в базовом счетчике, с кодом в специальном регистре сравнения. Регистр сравнения В таймера Т/С1 (младший байт) – OCR1BL, регистр сравнения В таймера Т/С1 (старший байт) – OCR1BH, регистр сравнения А таймера Т/С1 (младший байт) – OCR1AL, регистр сравнения А таймера Т/С1 (старший байт) – OCR1AH.
Функция ШИМ заключается в формировании на определенном выходе МК импульсной последовательности с заданными периодом повторения и длительностью импульсов. Регистр управления В таймера/счетчика Т/С1 – TCCR1B, регистр управления А таймера/счетчика Т/С1 – TCCR1A, счетный регистр таймера/счетчика Т/С0 – TCNTO, регистр управления таймера/счетчика Т/С0 – TCCRO.
Функция счета реального времени (Real Time Clock) реализуется в таймере-счетчике при использовании дополнительного внутреннего генератора с внешним кварцевым резонатором с частотой 32768 Гц (часовой кварц). При этом параметры процессов в таймере-счетчике с высокой точностью привязаны к единице измерения реального времени – секунде. Счетный регистр таймера/счетчика Т/С1 (младший байт) – TCNT1L, счетный регистр таймера/счетчика Т/С1 (старший байт) – TCNT1H.
Сторожевой таймер предназначен для ликвидации последствий сбоя в ходе программы путем перезапуска МК при обнаружении сбоя. Сторожевой таймер имеется у МК всех типов. Для управления данной функцией предназначен следующий регистр WDTCR – Регистр управления сторожевым таймером.
Аналого-цифровой преобразователь (Analog-to-Digital Converter) формирует десятиразрядный двоичный код числа, пропорционального величине напряжения аналогового сигнала на входе МК. В МК AVR к преобразователю могут подключаться от четырех до восьми входов МК.
Аналого-цифровой компаратор (Analog Comparator) сравнивает по величине аналоговые сигналы, поступающие на два входа МК, и формирует запрос прерывания ANA COMP, когда разность их значений меняет знак. При этом также может быть выдан сигнал для выполнения функции захвата в таймере-счетчике общего назначения. Регистр управления и состояния аналогового компаратора – ACSR.
Программируемый аппаратный модулятор (Programmable Hardware Modulator, PHM) предназначен для формирования импульсного сигнала для питания светодиодных индикаторов. Длительность импульса и скважность сигнала задаются программными средствами. Ток нагрузки может иметь величину до 25 мА при напряжении питания 1,8 В.
/RESET. Вывод для подачи сигнала сброса. Уровень лог. 0 на этом выводе, на протяжении минимум двух циклов системного такта при активном осцилляторе переводит МК в исходное состояние.
ICP. Вывод функции захват интегрированного таймера/счетчика Т/С1.
ОС1В. Вывод функции Сравнение интегрированного таймера/счетчика Т/С1.
ALE. Вывод для подачи импульса при записи младшего адресного байта с демультиплексированной шины данных/адреса через порт А во внешний фиксирующий регистр, когда к МК AVR подключена внешняя память RAM. Байт данных передается на втором шаге обращения к памяти RAM через порт А.
XTAL1. Вход интегрированного осциллятора для выработки такта системной синхронизации и, равным образом, вход для внешнего тактового сигнала, если внутренний осциллятор не применяется.
XTAL2. Выход интегрированного осциллятора для выработки такта системной синхронизации.