

4.1. Момент силы
Для
приведения тела во вращение необходимо,
чтобы приложенная к нему сила создавала
момент. Моментом
силы
относительно неподвижной точки
![]() (рис.4.2)
называется вектор
(рис.4.2)
называется вектор
![]() ,
(1.4.1)
,
(1.4.1)
Рис.4.2 |
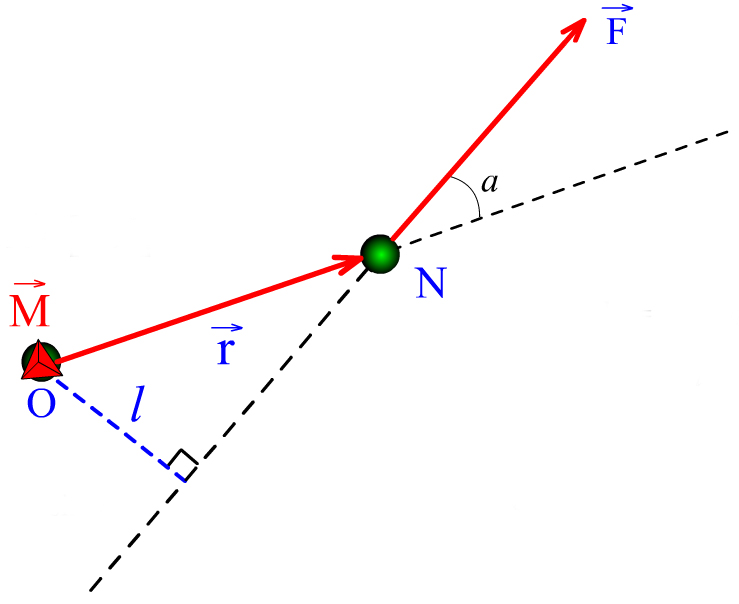
Вектор проходит через точку . Он перпендикулярен плоскости рисунка и направлен «к нам». Модуль момента силы определяется выражением:
![]() (1.4.2)
(1.4.2)
где
![]() - плечо силы (длина перпендикуляра,
опущенного из точки
на линию действия силы).
- плечо силы (длина перпендикуляра,
опущенного из точки
на линию действия силы).
При
вращении тела вокруг неподвижной оси
![]() вращательный момент создает только
одна составляющая действующей на него
силы, а именно
вращательный момент создает только
одна составляющая действующей на него
силы, а именно![]() - касательная к траектории точки ее
приложения. Следовательно, вектор
момента силы
- касательная к траектории точки ее
приложения. Следовательно, вектор
момента силы
![]() относительно начала координат
равен
относительно начала координат
равен
![]() (1.4.3)
(1.4.3)
Рис.4.3 |
Направление вектора
указано на рисунке. Его модуль равен:
Вектор
момента силы
|
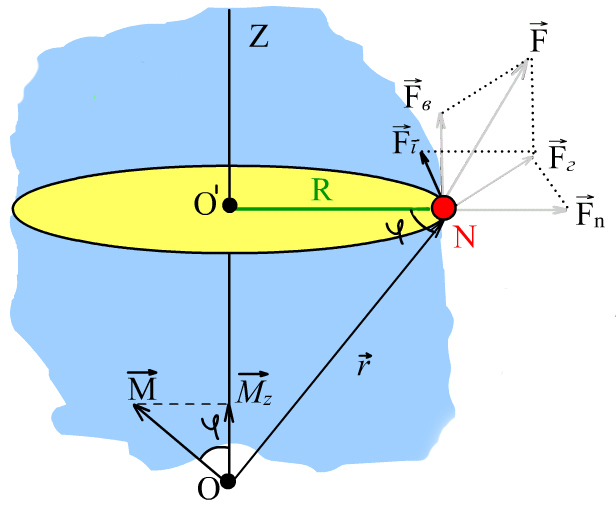
где
– расстояние от оси
до линии действия силы
![]() .
.
4.2. Момент инерции тела
Момент инерции тела – величина, определяющая его инертность во вращательном движении.
В динамике поступательного движения инерцию тела полностью характеризует его масса. Влияние собственных свойств тела на динамику вращательного движения оказывается более сложным, чем при поступательном движении.
Момент
инерции
![]() материальной точки относительно оси
вращения равен произведению массы
точки на квадрат расстояния
от точки до этой оси:
материальной точки относительно оси
вращения равен произведению массы
точки на квадрат расстояния
от точки до этой оси:
![]() .
(1.4.6)
.
(1.4.6)
Момент инерции тела относительно оси вращения равен сумме моментов инерции всех его материальных точек относительно этой оси:
 .
(1.4.7)
.
(1.4.7)
Следовательно, на инертность тела во вращательном движении влияют форма и геометрические размеры тела, его расположение относительно оси вращения, особенности распределения массы по объему.
В табл. 4.1 приведены моменты инерции некоторых тел правильной геометрической формы, выполненных из однородных материалов:
Таблица 4.1
Тело |
Положение оси вращения |
Момент инерции |
Полый тонкостенный цилиндр радиуса |
Ось симметрии |
|
Сплошной цилиндр или диск радиуса |
Ось симметрии |
|
Прямой тонкий стержень длиной |
Ось проходит через середину стержня перпендикулярно ему |
|
Шар радиусом |
Ось симметрии |
|
Для
расчета момента инерции тела относительно
произвольной оси, не проходящей через
центр масс, применяют теорему Штейнера:
момент инерции тела
относительно произвольной оси равен
сумме момента инерции
![]() тела относительно оси, проходящей через
центр масс, параллельно данной оси, и
произведения массы тела
на квадрат расстояния
тела относительно оси, проходящей через
центр масс, параллельно данной оси, и
произведения массы тела
на квадрат расстояния
![]() между этими осями:
между этими осями:
![]() .
(1.4.8)
.
(1.4.8)
Рис.4.4 |
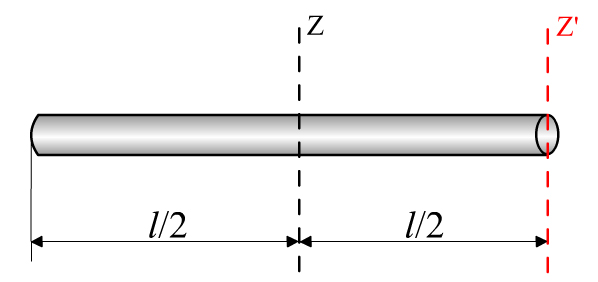
![]()
При переносе оси вращения из центра масс в конец стержня его момент инерции увеличился в 4 раза.
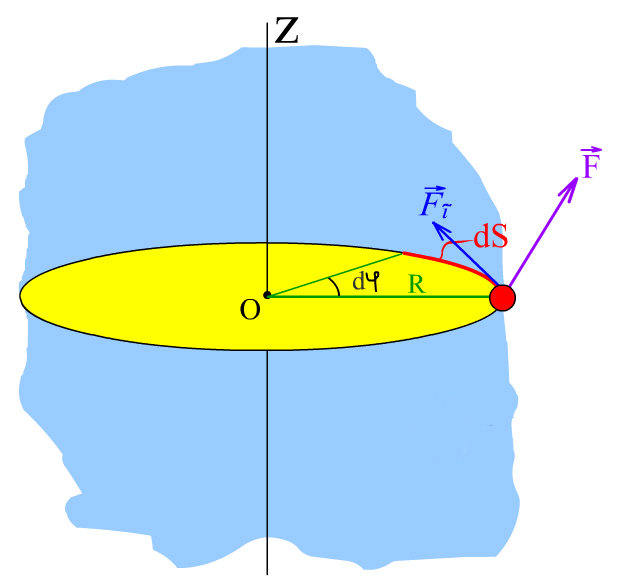
4.3. Работа и кинетическая энергия вращающегося тела
Рис.4.5 |
Пусть на твердое тело действует сила . Можно показать, что вращающий момент оси создает только составляющая силы , касательная к траектории точки ее приложения. За
время
|
Кинетическая
энергия вращающегося тела определяется
суммой кинетических энергий его
элементарных объемов, которую с учетом
выражения (![]() ),
равна:
),
равна:
![]()
![]() .
(1.4.10)
.
(1.4.10)
В случае плоского движения тела, например цилиндра, скатывающегося с наклонной плоскости без скольжения, энергия складывается из энергии поступательного движения и энергии вращения:
![]() ,
(1.4.11)
,
(1.4.11)
где
– масса скатывающегося тела;
![]() – скорость центра масс тела;
– скорость центра масс тела;
![]() – момент инерции тела относительно
оси, проходящей через центр масс;
– момент инерции тела относительно
оси, проходящей через центр масс;
![]() – угловая скорость вращения.
– угловая скорость вращения.