

Усилители сау
Работа каждого усилителя основана на принципе использования вспомогательной энергии (рис. 17).

Рис. 17. Усилитель САУ
Основные показатели и характеристики
Коэффициент усиления по мощности
 .
.
Коэффициент усиления по напряжению
 .
.
Коэффициент полезного действия (КПД)
![]() .
.
Типы усилителей
По конструкции и принципу действия усилители делятся:
Электронные усилители;
Электромашинные;
Магнитные;
Гидравлические;
Пневматические.
Рассмотрим подробнее электромашинный усилитель поперечного поля (ЭМУПП)

Рис. 18.Схема ЭМУПП
Коментарии к рис. 18
Принцип работы
![]()

|
Достоинства |
Недостатки |
|
|
Датчики сао
Датчики служат для преобразования неэлектрической величины в электрическую и состоят из:
Чувствительного элемента
Это конструкция, которая зависит от физической природы измеряемой величины;
Преобразователя
Конструкция, преобразующая величину, измеряемую чувствительным элементом, в удобную для передачи форму.
Виды датчиков
|
Датчики перемещения |
Датчики скорости вращения |
Датчики температуры |
|
|
|
Тахогенератор постоянного тока

Рис. 19. Тахогенератор постоянного тока
Коментарии к рисунку19:
Принцип работы
![]() ;
;
![]() ;
;
![]() или
или ![]() .
.
Лекция 4
САР скорости вращения ИДПТ с ОС по скорости
Принцип работы ИДПТ с ОС по скорости схематично изображен на рис. 20 и 21

Рис. 20. САР скорости вращения ИДПТ с ОС по скорости: принцип работы

Рис. 21. САР скорости вращения ИДПТ с ОС по скорости: схема
Комментарии к рисунку
Принцип работы
![]() ;
;
 ;
;
![]() ;
;
![]() ;
;
 ;
;
 ;
;
 .
.
Уравнение статики для объекта управления

Рис. 22. График уравнения статики для объекта управления
САР скорости вращения ИДПТ с ОС по возмущению (положительной по току) и по отклонению (отрицательной по скорости)

Рис. 23. САР скорости вращения ИДПТ с ОС по возмущению (положительной по току) и по отклонению (отрицательной по скорости): схема
Крментарии к риунку
Принцип работы
![]()
![]()
![]()






Рис. 24.
Статический режим работы САР
Статический режим – это такой режим при котором можно считать что все переходные процессы в системе закончены.
Система автоматического регулирования скорости вращения двигателя постоянна.
Объект управления –> ИДПТ
Усилитель –> ЭМУ
ДС –> ТГПТ

Рис. 25. Статический режим работы САР
Коментарии рисунку:
g – возмущение в виде нагрузки (момент приложенный к валу)
У – управляемая величина (n- скорость вращения двигателя)
U – напряжение подаваемое на якорь
V – сигнал управл. на 1-ой обмотке Uу1
Динамический режим работы САР
При динамическом режиме работы системы поведение выходных параметров элементов САУ можно представить в виде дифференциальных уравнений. В зависимости от свойств элемента дифференциальное уравнение может быть:
Линейным;
Нелинейным;
Разностным.

Рис. 26. Динамический режим работы САР
Общий вид дифференциального уравнения

Динамический
оператор:
![]()

 (передаточная функция звена)
(передаточная функция звена)
Типы соединения элементов САУ
Элементы САУ могут быть соединены последовательно, параллельно или иметь обратную связь.
Последовательное соединение

Рис. 27. Типы соединения элементов САУ: последовательное соединение
![]()
![]()
![]()

Параллельное соединение

Рис. 28. Типы соединения элементов САУ: параллельное соединение
![]()
![]()
![]()

Звено, охваченное обратной связью

Рис. 29.
![]()
![]()
![]()
![]()
![]()

Лекция 5
Основные характеристики динамических звеньев
К основным характеристикам динамического звена относятся:
Комплексный коэффициент усиления;
Амплитудно-фазовая характеристика (АЧХ);
Фазово-частотная характеристика (ФЧХ);
Логарифмическиехарактеристики;
Временные характеристики.
Комплексный коэффициент усиления
![]()
Предполагается, что через звено пропускается сигнал с частотой f.
![]()

Рис. 30
Эта характеристика показывает, как меняется амплитуда и фаза сигнала. Характеристика называется Амплитудно-фазовой частотной характеристикой (ЛФЧХ).
Гадограф

Рис. 31. Годограф (ЛФЧХ)
Амплитудно-фазовая характеристика (АЧХ)
![]()

Рис. 32. АЧХ
Физический смысл: данная характеристика показывает, насколько хорошо или плохо звено пропускает сигналы разной гармонической частоты.
Фазово-частотная характеристика (ФЧХ)
Данная характеристика показывает, каким образом меняется фазовый сдвиг между входным и выходным синусоидальными сигналами.
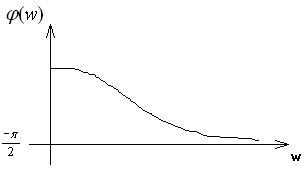
Рис. 33. ФЧХ
Логарифмическиехарактеристики
![]()
![]()
Логарифмическая амплитудно-частотная характеристика (ЛАЧХ)
![]() ,
1 Белл=10 дБ=
,
1 Белл=10 дБ=![]()
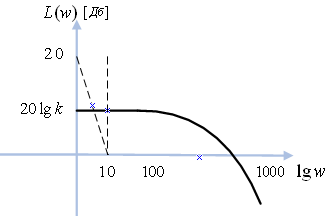
Рис. 34. ЛАЧХ
Свойства ЛАЧХ:
Начальная частота выбирается не равной 0;
При
 -
- ,
, и
и ;
;
Асимптотическая ЛАЧХ
Асимптотическая ЛАЧХ представляет собой замену непрерывной ЛАЧХ набором прямых, меняющих свой наклон на сопрягающихся частях (удобно для быстрого построения).
Временные характеристики
Для исследования работы САУ в динамическом режиме вводится понятие типовых воздействий и реакций на эти воздействия. Физический смысл: воздействие управления сигнала в момент включения системы, воздействие нагрузки.
Типовые воздействия
Единичная функция


Рис. 35. Единичная функция
Физический смысл: воздействие управляющего сигнала в момент включения системы, подача нагрузки на вал двигателя.
Импульсная функция



Рис. 36. Импульсная функция
Физический смысл: кратковременное действие нагрузки на вал двигателя, помехи на систему.
Типовые реакции на воздействие
Реакция на единичную функцию называется переходной функцией h(t), которая показывает как измененный выходной сигнал при подаче на вход единичной функции 1(t).

Рис. 37. Реакция на единичную функцию
Реакция на дельта-функцию (
 )
представляет собой изменение во времени
сигнала элемента системы и называется
весовой функцией
)
представляет собой изменение во времени
сигнала элемента системы и называется
весовой функцией  .
.

Рис. 38.Рекция на дельта-функцию