

Законыуправления
Под законом управления понимают алгоритм (последовательность операций) или функциональную зависимость, в соответствии с которой формируются управляющие воздействия.
Статические и динамические свойства объекта можно апроксимировать. Если закон формируется не на ЭВМ, то регулятор создается на основе технических элементов, а на ЭВМ создается соответствующее программное управление.
Существуют следующие законы управления: пропорциональный, интегральный, пропорционально-интегральный, пропорционально-интегральный с введением производной.
|
Закон |
Формула закона |
Достоинства |
Недостатки |
|
Пропорциональный |
|
|
Подобные регуляторы называются П-регуляторы. |
|
Интегральный |
|
|
Подобные регуляторы называются И-регуляторы. |
|
Пропорционально-интегральный |
|
|
Подобные регуляторы называются ПИ-регуляторы |
|
Пропорционально-интегральный с введением производной |
|
|
Подобные регуляторы называются ПИД-регуляторы |
Статическое и астатическое регулирование
Регулирование называется статическим, если установившееся значение управляющей величины после переходного процесса зависит от нагрузки или от контролируемого возмущения (рис. 6).

Рис. 6. Статическое регулирование
Коэффициент
статического регулирования (статизма):
![]() .
.
Если в установившемся режиме управляющая величина не зависит от нагрузки, то регулирование такой системы называется астатическим (рис. 7).
![]()

Рис. 7. Астатическое регулирование
Коэффициент
статизма:
![]() .
.
Основные классы систем управления
В зависимости от информации, полученной от объекта управления в процессе его работы, а также от математического описания объекта, системы управления подразделяются на:
Системы стабилизации
Подобные системы предназначены для поддержания с необходимой точностью постоянного значения управляемой величины. Управление в такие системах ведется либо по возмущению, либо по отклонению.
Y=const.
Системы программного управления
Управление ведется как функция времени, отслеживая изменение управляемой величины.
V(t)-задающая функция.
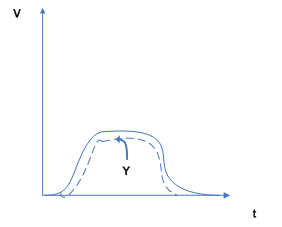
Рис. 8.Системы программного управления
Следящие системы
Эти системы имеют цель получить ошибку при управлении.
E(t)=Y(t)-V(t) -> 0.
Самонастраивающиеся (адаптивные) системы
Данные системы служат для поддержания экстремального значения управляемой величины. В подобных cиcтемах применяется экстремальный регулятор.
V(t)=extr Y(t).