

1.3. Пассивные связи. Лишние степени свободы
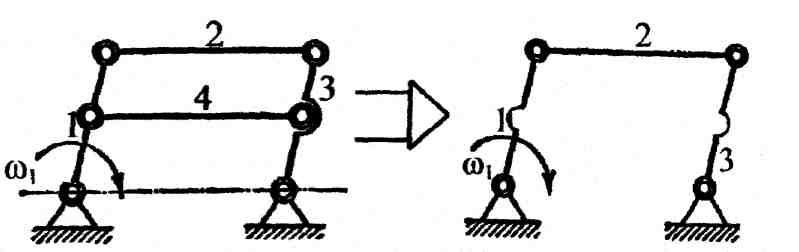
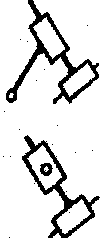
Рис. 1.25
Звено 4 – пассивная связь. Его удаление не влияет на характер движения механизма.
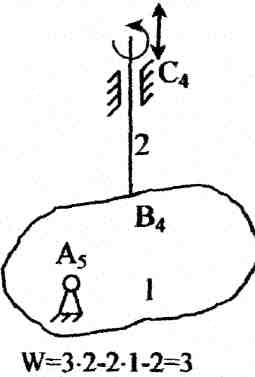
Вращение звена 2 в кинематической паре С4 - лишняя степень свободы.
1.4. Замена высших кинематических пар низшими кинематическими парами
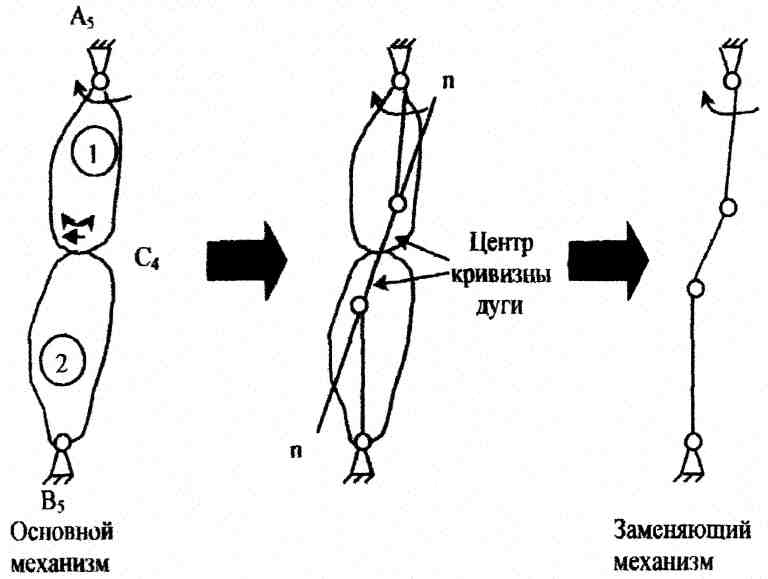
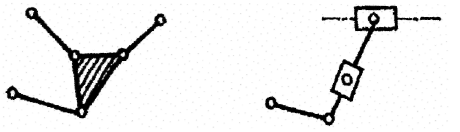
Рис. 1.27
Алгоритм замены высших кинематических пар на низшие:
1. Через точку касания высшей кинематической пары провести нормаль.
2. На нормали в центре кривизны кривых поставить низшие кинематические пары и соединить их звеном.
3. Полученные низшие кинематические пары соединить звеньями с имевшимися низшими кинематическими парами.
4. В заменяющем механизме степень подвижности должна быть такой же как и в основном механизме,
1.5. Принцип образования плоских механизмов (Ассур л.В., Артоболевский и.И.)
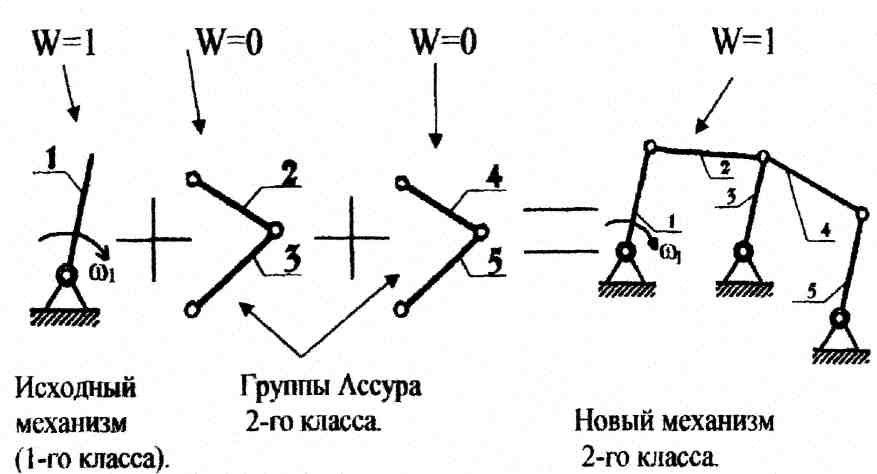
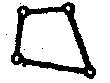
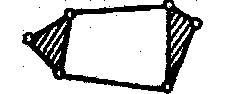
Рис. 1.28
Цель структурного анализа механизма – определить класс механизма: разложить его на исходный механизм и группы Ассура, определив их класс.
Группа Ассура - кинематическая цепь с нулевой степенью подвижности, которая не распадается на более простые кинематические цепи, также обладающие нулевой степенью подвижности.
1.6. Классификация групп Ассура
Таблица 1.1.
Класс |
Признак |
Схемы групп Ассура |
Порядок |
|
|||||
II |
|
|
|
|
|
|
2
|
|
|
1 |
2 |
3 |
4 |
5 |
|
||||
Виды групп |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
||||||
IV |
|
|
2 |
||||||
|
|
|
|
||||||


 III
III
Группы Ассура бывают 2-го, 3-го и 4 классов.
Порядок группы Ассура определяется числом элементов, которыми она присоединяется.
Группа Ассура 2-го класса состоит из двух звеньев, 3-его и 4-го классов -из четырех звеньев.