

Лекция 16 Редукторы, классификация, схемы.
Р е д у к т о р о м называется механизм, понижающий угловую скорость и увеличивающий вращающий момент в приводах от электродвигателя к рабочей машине.
Редуктор состоит из зубчатых или червячных передач, установленных в отдельном герметичном корпусе, что принципиально отличает его от зубчатой или червячной передачи, встроиваемой в исполнительный механизм или машину.
Редукторы широко применяют в различных отраслях машиностроения, поэтому число разновидностей их велико.(Рис. 16. 1, а - м).
Чтобы уменьшить габариты привода и улучшить его внешний вид, в машиностроении широко применяют мотор – редукторы. представляющие агрегат. В котором объединены электродвигатель и редуктор (Рис. 16. 2).
Редукторы классифицируются по типам, типоразмерам и исполнениям.
Тип редуктора определяется составом передач, порядком их размещения в направлении от быстроходного вала к тихоходному и положением осей валов в пространстве.
Для обозначения передач используются прописные буквы русского алфавита: Ц — цилиндрическая, К — коническая, Ч — червячная, Г — глобоидная, П — планетарная, В — волновая.
Если одинаковых передач две или более, то после буквы ставится соответствующая цифра. Широкий редуктор обозначается буквой Ш, узкий — У, соосный — С. В мотор-редукторах к обозначению впереди добавляется буква М.
Наиболее распространены редукторы с валами, расположенными в горизонтальной плоскости, и поэтому специального обозначения не имеют (у червячных редукторов валы скрещиваются, оставаясь горизонтальными).
Так, например, на рис. 16.1, ж показана схема редуктора типа К1Ц2 — коническо-цилиндрического трехступенчатого редуктора с одной конической и двумя цилиндрическими передачами, все валы которого расположены в горизонтальной плоскости (мотор-редуктор на базе этого примера обозначается МКЦ2).
Если все валы редуктора расположены в одной вертикальной плоскости, то к обозначению типа добавляется индекс В. Если ось тихоходного вала вертикальна, то добавляется индекс Т, если ось быстроходного вала вертикальна,— индекс Б.
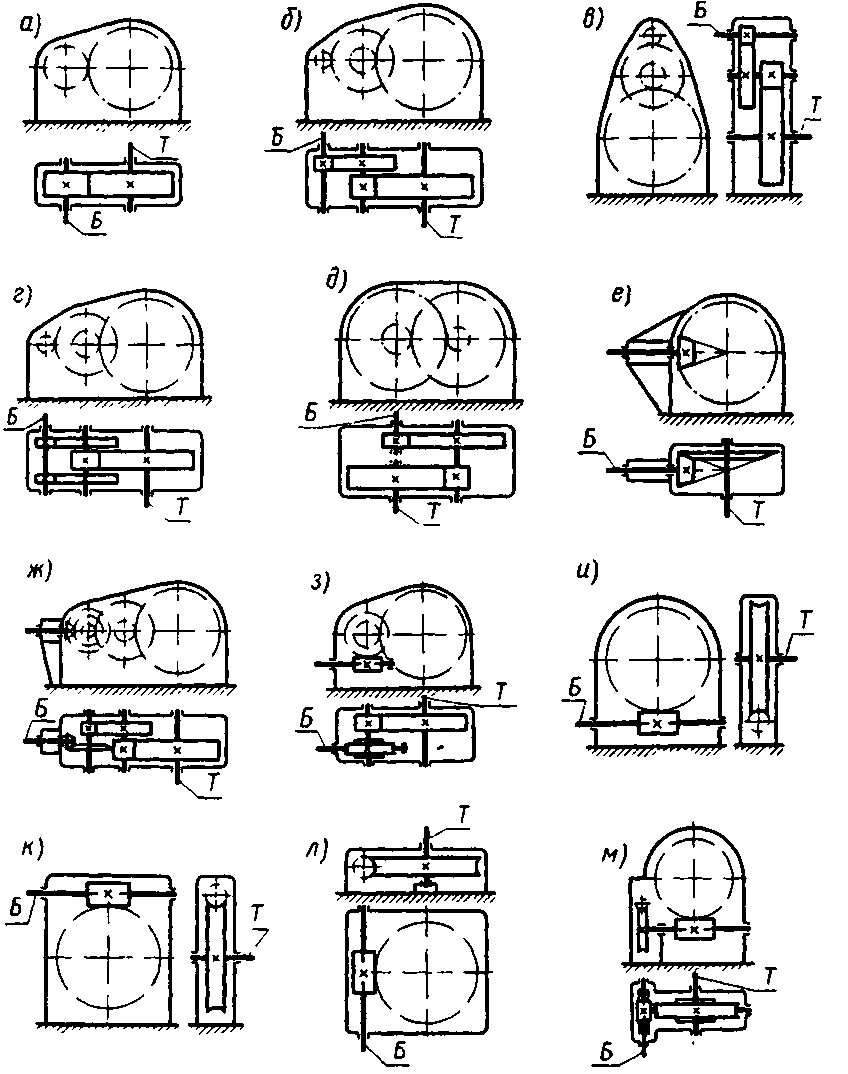
Рис. 16.1. Кинематические схемы редукторов
Б – быстроходный вал; Т – тихоходный вал.
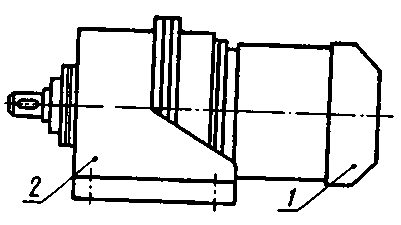
Рис. 16. 2
Например, на рис 16.1, в приведена схема редуктора типа Ц2в — цилиндрического двухступенчатого редуктора, все валы которого расположены в вертикальной плоскости, а на рис. 16.1, л показана схема редуктора типа Чт — червячного одноступенчатого с вертикальной осью тихоходного вала.
Типоразмер редуктора определяется типом и главным параметром тихоходной ступени.
Для цилиндрической, червячной и глобоидной передач главным параметром является межосевое расстояние aw, конической — внешний делительный диаметр колеса de2, планетарной — радиус водила Rw, волновой — внутренний диаметр гибкого колеса d в недеформированном состоянии.
Исполнение редуктора определяется передаточным числом, вариантом сборки и формой концевых участков валов.
Так, например, типоразмер приведенного выше мотор-редуктора с межосевым расстоянием тихоходной ступени aw= 180 мм и передаточным числом u = 56 будет обозначаться МКЦ2-180—56.
Основная энергетическая характеристик а редуктора — номинальный вращающий момент Т на его тихоходном валу при постоянной нагрузке.