

11.2. Механизмы передач с подвижными осями
Механизмы передач с подвижными осями называются планетарными или зубчато-рычажными.
Одноступенчатый планетарный редуктор, как правило, состоит из одного центрального подвижного колеса; одного центрального неподвижного колеса, называемого опорным; одного или нескольких сателлитов на оси, установленной на водиле (рычаге).
На рис. 11.3 показана схема одноступенчатого планетарного механизма, который состоит из центрального подвижного колеса 1, вращающегося с угловой скоростью ω1 вокруг оси ОО; водила Н, вращающегося с угловой скоростью ωН вокруг оси ОО; сдвоенного сателлита 2 2', установленного на водиле Н и вращающегося вместе с ним со скоростью ωН, а также с угловой скоростью ω2 вокруг собственной оси; центрального неподвижного (опорного) колеса 3 и неподвижной стойки 4.
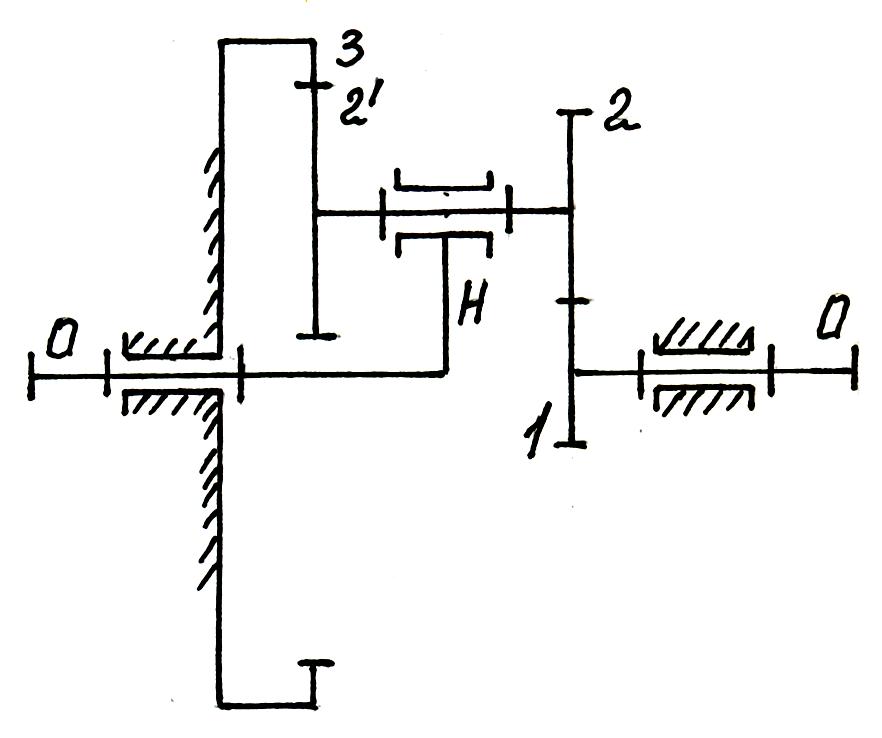
Рис. 11. 3
Определим степень подвижности планетарного механизма (рис.11.3), имеющего три подвижных звена, три низших кинематических пар и две высших кинематических пар, т.е. n=3, p2=3, p1=2:
![]() .
.
Аналитически передаточное отношение планетарного механизма опре-деляется методом обращенного движения, при котором всему механизму условно сообщается угловая скорость, равная по модулю, но противоположная по направлению угловой скорости ωН водила.
В этом случае водило становится как бы неподвижным и планетарный механизм превращается в обычный механизм с неподвижными осями вращения колес 1,2,2' и 3. Такой механизм называется обращенным. Его передаточное отношение равно:
![]() .
.
Индекс в скобках (Н) указывает неподвижное звено.
С другой стороны передаточное отношение обращенного механизма равно отношению угловых скоростей звеньев в обращенном движении:
![]() .
.
Учитывая, что фактически угловая скорость ω3=0, получим:
![]() ,
,
откуда
![]() .
.
Если ведущим в планетарном механизме является водило Н, то передаточное отношение механизма равно:
![]() .
.
Если планетарный механизм имеет две ступени, то сначала определяется передаточное отношение каждой ступени и1 и и2, а затем определяется общее передаточное отношение как их произведение
и= и1·и2 .
Пример.
Для заданной на рис.
3.19
кинематической схемы планетарного
редуктора определить число оборотов
nвых
выходного вала, если известны число
оборотов n1
входного вала и количество зубьев
зубчатых колес
![]() .
.
Решение. Из схемы планетарного редуктора видно, что он является двухступенчатым. Каждая ступень редуктора представляет собой планетарный механизм.
Первая ступень редуктора включает центральное подвижное колесо 1, сателлит 2, неподвижное (опорное) колесо 3 и водило Н1.
Вторая ступень редуктора включает центральное подвижное колесо 5, сателлит 4, неподвижное (опорное) центральное колесо 3' и водило Н2.
В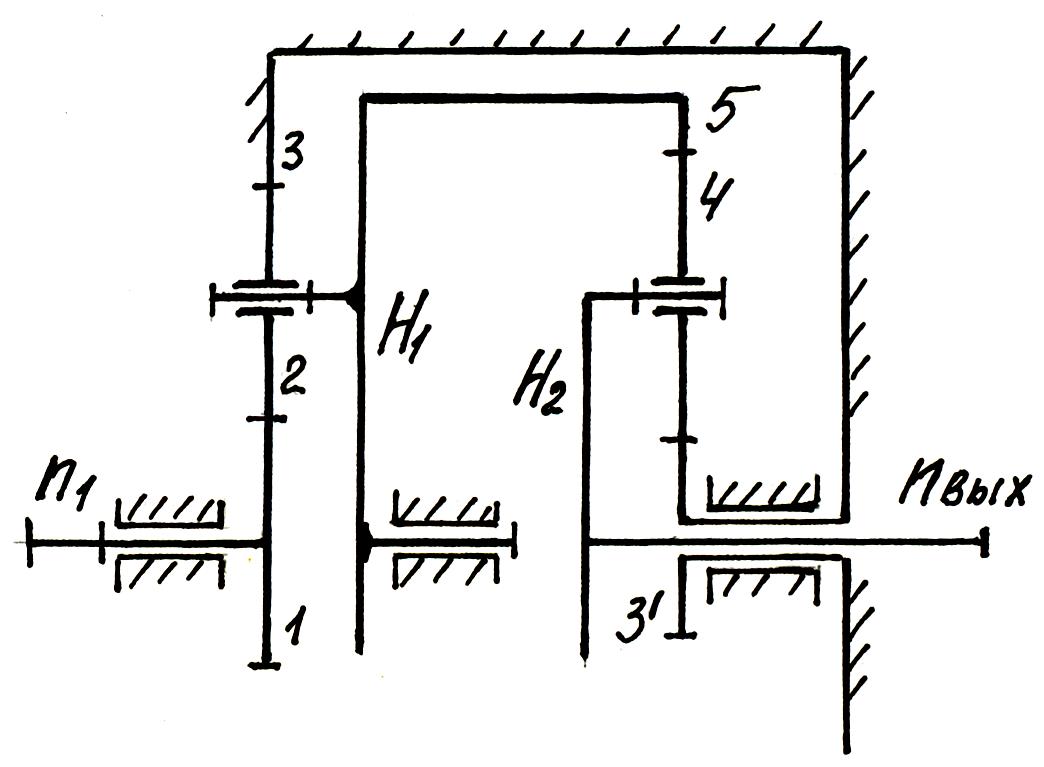 ращаясь,
колесо 1 вращает сателлит 2, который
перекатываясь по неподвижному колесу
3, заставляет вращаться водило Н, а
следовательно, и связанное с ним колесо
5. Колесо 5 вращает сателлит 4, который,
перекатываясь по неподвижному колесу
3', заставляет вращаться водило Н2
и, следовательно, выходной вал.
ращаясь,
колесо 1 вращает сателлит 2, который
перекатываясь по неподвижному колесу
3, заставляет вращаться водило Н, а
следовательно, и связанное с ним колесо
5. Колесо 5 вращает сателлит 4, который,
перекатываясь по неподвижному колесу
3', заставляет вращаться водило Н2
и, следовательно, выходной вал.
Рис. 11.4
Общее передаточное число заданного редуктора равно: и= и1 ·и2 ,
где:
![]() - передаточное отношение первой ступени;
- передаточное отношение первой ступени;
![]() -
передаточное отношение второй ступени.
-
передаточное отношение второй ступени.
Поэтому запишем:
![]() ;
;
 .
.
Теперь общее передаточное отношение планетарного редуктора равно:
 .
.
Число оборотов выходного вала равно
![]() .
.
Раздел детали машин
Лекция 12
Механические передачи. Прямозубая
цилиндрическая передача