

Лекция 11
Кинематическое исследование механизмов передач. Передаточные отношения одноступенчатых и многоступенчатых механизмов. Механизмы передач с подвижными осями.
11.1. Механизмы передач с неподвижными осями.
Простейшим является трехзвенный зубчатый механизм, состоящий из стойки и двух зубчатых колес, меньшее из которых называется шестерней. В зацеплении находится высшая кинематическая пара ВКП, а в осях – две низшие вращательные кинематические пары НКП.
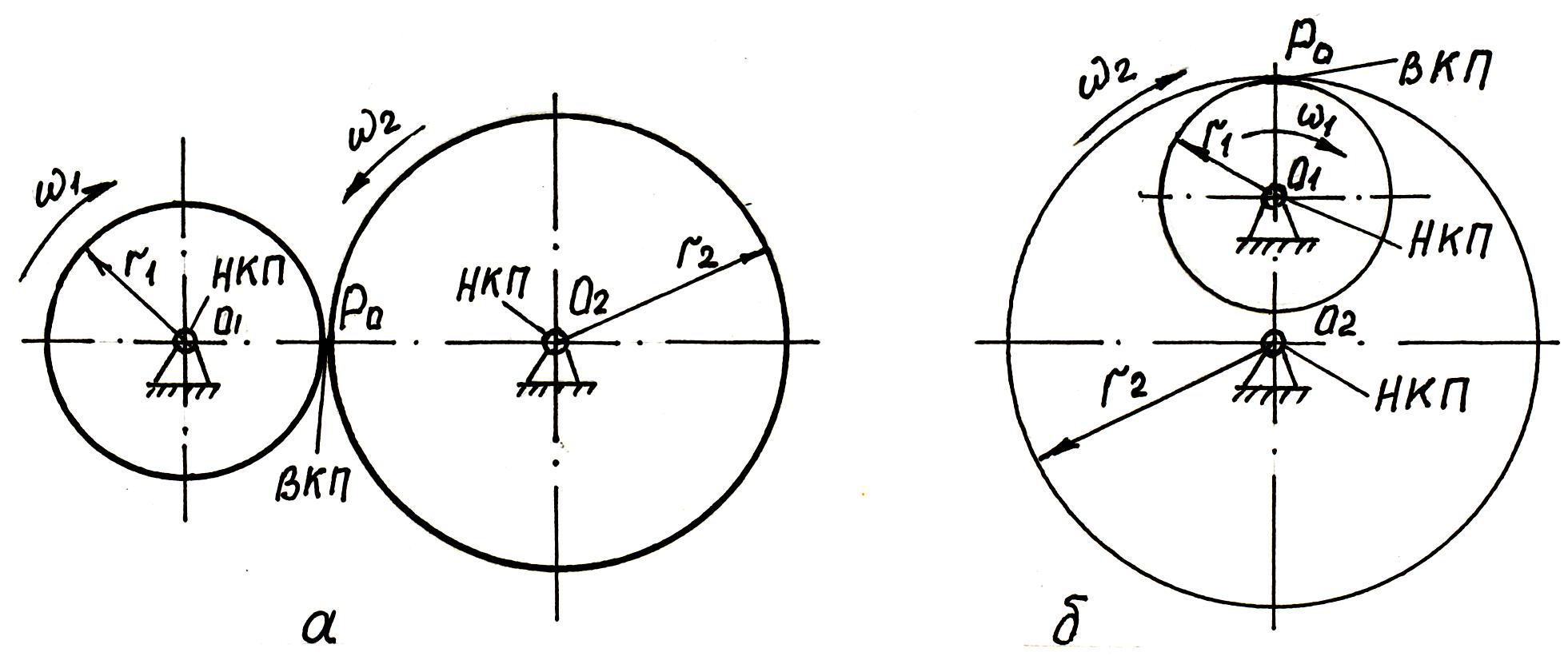
Рис. 11.1
Зубчатый механизм может быть с внешним (рис. 11. 1. а) и внутренним (рис. 11. 1. б) зацеплением. Точка Р0 представляет собой мгновенный центр вращения в относительном движении зубчатых колес. Радиусы r1 и r2 являются радиусами окружностей, перекатывающихся друг по другу без скольжения и называющихся центроидами или начальными окружностями. Как видно из рис. 11.1, при внешнем зацеплении колеса вращаются в противоположные стороны, а при внутреннем зацеплении – в одну сторону.
Отношение угловых скоростей ω1 и ω2 двух взаимосвязанных звеньев механизма называется передаточным отношением:
![]() ;
;
![]() .
.
Для зубчатого механизма, у которого угловые скорости всегда обратно пропорциональны количеству зубьев, можно записать:
![]() ;
;
![]() .
.
Знак «плюс» относится к внутреннему зацеплению, при котором угловые скорости ω1 и ω2 одного направления; знак «минус» относится к внешнему зацеплению, при котором угловые скорости ω1 и ω2 противоположно направлены.
Отношение угловых скоростей ведущего звена ω1 к ведомому звену ω2 по модулю называется передаточным отношением:
![]() .
.
При
![]() передача является понижающей и называется
редуктором;
при
передача является понижающей и называется
редуктором;
при
![]() передача является повышающей и называется
мультипликатором.
передача является повышающей и называется
мультипликатором.
Для исследования закона распределения скоростей точек зубчатых колес применяется метод Смирнова, с помощью которого можно графически определить скорость любой точки зубчатого колеса по картине скоростей.
Пусть окружности с радиусами r1 и r2 , соприкасаясь в точке Р, перека-тываются без скольжения друг по другу с угловыми скоростями ω1 и ω2 (рис. 11.1).
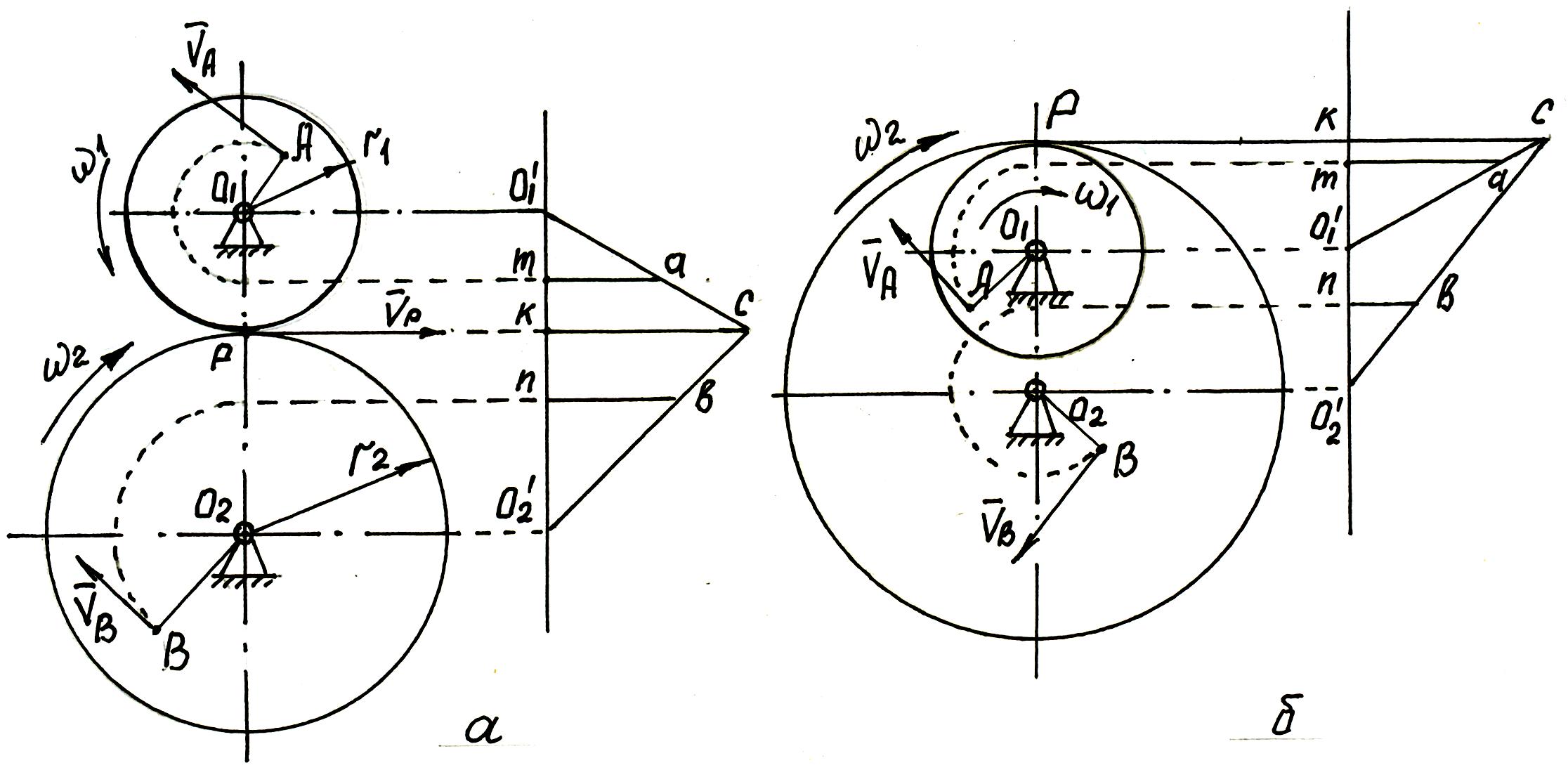
Рис. 11. 2
Проводим
прямую параллельно межцентровой линии
О1О2
и проектируем на нее точки О1,
Р
и О2,
в результате получим точки
![]() ,
К
и
,
К
и
![]() .
.
Скорости
точки Р,
принадлежащей обеим окружностям, равны
![]() и направлены перпендикулярно межцентровой
линии О1О2,
причем ,
и направлены перпендикулярно межцентровой
линии О1О2,
причем ,
![]() и
и
![]() .
Из точки К
откладываем вектор
.
Из точки К
откладываем вектор
![]() в масштабе
в масштабе
 в виде отрезка
в виде отрезка
 .
Так как скорости точек О1
и
О2
равны нулю, соединяем точки
.
Так как скорости точек О1
и
О2
равны нулю, соединяем точки
![]() и
и
![]() с точкой С,
в результате чего получаем два треугольника
с точкой С,
в результате чего получаем два треугольника
![]() и
и
![]() ,
которые являются картинами распределения
скоростей точек зубчатых колес 1
и 2.
,
которые являются картинами распределения
скоростей точек зубчатых колес 1
и 2.
При
необходимости определения скорости
точки А,
принадлежащей зубчатому колесу 1,
или скорости точки В,
принадлежащей колесу 2,
необходимо их перенести по направлению
угловых скоростей ω1
и ω2
на прямую
О1О2,
а затем спроектировать на прямую
![]() .
Отрезки ma
и nb
в масштабе
.
Отрезки ma
и nb
в масштабе
![]() определяют скорости точек А
и В:
определяют скорости точек А
и В:
![]()
![]() ;
;
![]() .
.
При
этом векторы этих скоростей перпендикулярны
их радиусам, т.е.
![]() ,
,
![]() .
.
Аналогично построена картина распределения скоростей зубчатых колес при внутреннем зацеплении (рис. 11.2.б), по которой точно также определяются скорости точек VA и VB.
При наличии в механизме нескольких ступеней зубчатых передач, имеющих передаточные числа и1, и2, и3 и т.д., общее передаточное число и определяется как их произведение: и= и1·и2 · и3 .
Если несколько зубчатых колес непосредственно связаны друг с другом, то все зубчатые колеса, кроме первого и последнего, не оказывают влияние на общее передаточное число и называются паразитками. Они только увели-чивают межцентровое расстояние и изменяют направление вращения.