

Билет № 6 Вопрос №2 стр.1 Принципы выбора приводных электродвигателей для насосов
Для правильного выбора приводящего двигателя для насосов гидроприводов необходимо из всего многообразия режимов, выражаемых механической характеристикой двигателя, установить нормальный рабочий режим, исходя из характера нагрузки гидропривода. С этой точки зрения можно выделить три режима работы гидроприводов:
продолжительный – работа с постоянной нагрузкой в течение длительного времени, соизмеримого с постоянной времени нагрева двигателя или нагрузки, повторяется часто;
кратковременный – работа с кратковременным действием пиковой нагрузки; время работы вхолостую или со значительно меньшей нагрузкой или время стоянки несоизмеримо больше времени работы и постоянной времени нагрузки;
повторно-кратковременный – работа с повторно-кратко-временной нагрузкой — чередование соизмеримых по времени периодов нагрузки и работы вхолостую.
Двигатель привода для продолжительного режима работы следует выбирать по номинальному режиму, определяемому максимально необходимой подачей насоса при максимальном давлении нагнетания насоса. Мощность двигателя (кВт) определяют по формуле
 , (7.22)
, (7.22)
где М – момент на валу двигателя, Н·м; п – частота вращения вала двигателя, с-1; k – коэффициент запаса, обычно k = 1,0÷1,1;
Q – подача насоса, м3/с; р – давление нагнетания, Па; η – КПД насоса.
При кратковременном действии нагрузки двигатель можно выбирать по перегрузочному режиму (момент больше номинального). В этом случае момент определяют по формуле
 , (7.23)
, (7.23)
где V0 – рабочий объем насоса в перегрузочном режиме, м3;
pmax – давление нагнетания перегрузочного режима, Па;
ηmax – КПД насоса при рmax и V0 ; k = 1,01,05.
Номинальный момент на валу двигателя
 , (7.24)
, (7.24)
где ηном. – КПД насоса при номинальном давлении рном и V0.
Двигатель выбирают по перегрузочному моменту Мmax с проверкой по номинальному Мном. Если номинальный момент насоса превышает номинальный момент двигателя, следует двигатель выбрать по номинальному моменту на валу насоса.
Для повторно-кратковременных режимов работы гидроприводов мощность двигателя определяют по средней мощности насоса:
 , (7.25)
, (7.25)
где k – допустимая перегрузка двигателя; ηi – КПД насоса для i-того участка нагрузочной диаграммы; Ni – полезная мощность насоса на i-том участке нагрузочной диаграммы; ti – время, в те-чение которого действует Ni; tц – время цикла.
По мощности Nср выбирают двигатель соответствующей мощности. Номинальный момент Мдв.ном выбранного двигателя сравнивают с эквивалентным моментом, определяемым по формуле
Билет № 6 Вопрос №2 стр.2
 (7.26)
(7.26)
 , (7.27)
, (7.27)
где Мi —момент на валу двигателя на i-том участке нагрузочной диаграммы.
Если неравенство (7.27) не выполняется, то двигатель непригоден, так как при работе в этом режиме может произойти перегрев. В этом случае следует выбрать двигатель большей мощности по моменту Мэкв с соблюдением неравенства (7.27).
В качестве приводящих двигателей могут быть использованы дизели, двигатели внутреннего сгорания, газовые турбины, электрические двигатели.
Электродвигатели, широко применяемые в гидроприводах, имеют механические характеристики, разнообразие которых определяется типом электродвигателя. Механической характеристикой электродвигателя называют зависимость крутящего момента двигателя от частоты вращения М = f (n) при постоянном напряжении питания и возбуждения. Характерными точками механической характеристики являются точки, отображающие режим холостого хода (Мх.х; пх.х), номинальный (Мном; пном) и пусковой (Мпуск) режимы. Форма механической характеристики определяется ее жесткостью. Жесткость – отношение приращения момента к приращению частоты вращения. Двигатели с жесткой механической характеристикой мало изменяют частоту вращения вала при изменении нагрузочного момента в широких пределах. Это означает стабильную работу насоса в условиях интенсивного изменения давления. Механические характеристики трехфазного электродвигателя переменного тока и двигателя постоянного тока показаны на рис. 7.14. Аппроксимация рабочей части нелинейной механической характеристики позволяет записать следующую зависимость крутящего момента от скорости вращения вала:
 , (7.28)
, (7.28)
где Мmax – максимальный крутящий момент; пх.х – частота вращения вала при холостом ходе электродвигателя; nmax – частота вращения вала, соответствующая максимальному крутящему моменту.
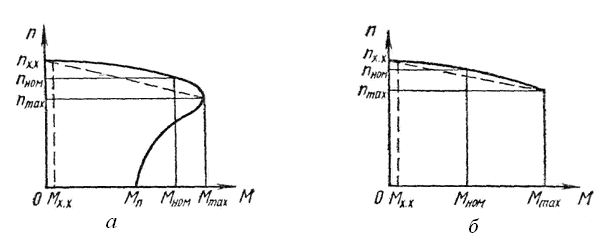
Рис. 7.14. Механические характеристики трехфазного электродвигателя переменного тока (а) и электродвигателя постоянного тока (б)
Приводящий двигатель и насос образуют насосный агрегат. В зависимости от типа применяемого приводящего двигателя различают электронасосный (электродвигатель), дизель-насосный и другие агрегаты. Насосный агрегат с комплектующим оборудованием, смонтированным по определенной схеме, обеспечивающей работу насоса, называют насосной установкой.