

5.7. Регулирование скорости вращения асинхронного двигателя изменением числа пар полюсов
Так как
![]() ,
(5.20)
,
(5.20)
то изменяя - число пар полюсов, можно регулировать частоту вращения. Число пар полюсов может быть только целым, поэтому регулирование ступенчатое. Изменение не приводит к изменению параметров Д, следовательно, характеристики естественные. Сложность состоит в создании многосекционной обмотки на статоре, переключением которой можно было бы изменять число полюсов.
Для регулирования этим способом используются только Д с короткозамкнутым ротором, обмотка ротора которых приспосабливается к переключаемой обмотке статора. У Д с фазным ротором пришлось бы делать такую же многосекционную обмотку на роторе, как и на статоре [1; 9].
Рассмотрим схемы включения секций обмотки статора.
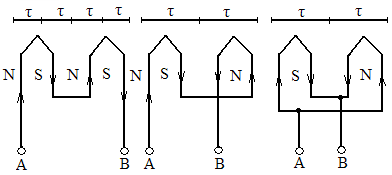
Рис. 5.11. Схемы включения секций фазовой обмотки статора АД
Если секционировать статорную обмотку и по-разному включать секции обмотки, то получим разное число пар полюсов на статоре, при этом схемы включения секций могут быть различными. (рис. 5.11) От схемы соединения секций обмоток будет зависеть магнитная индукция в воздушном зазоре Д и развиваемый на валу двигателя момент. Рассмотрим три примера соединения обмоток.
1 . Схема соединения секций обмоток y-δ
2. Схема соединения секций обмоток y-yy
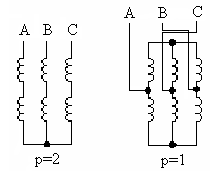
3 . Схема соединения секций обмоток δ-yy
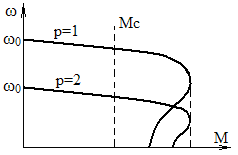
Рис. 5.12. Схемы соединения обмоток и соответствующие
им механические характеристики
Моменты, развиваемые Д при различных схемах соединения обмоток, относятся как соответствующие магнитные индукции:
![]() .
.
Данный способ прост, позволяет получить жёсткие механические характеристики, экономичен (машина работает в номинальном режиме).
Недостатком является ступенчатость регулирования.
Как видно из рис. 5.12 и таблицы 5.1, в зависимости от характера нагрузки (вентиляторная, с постоянным моментом, с постоянной мощностью) можно выбрать соответствующую схему соединения обмоток.
Промышленность выпускает 2-х, 3-х и 4-х скоростные двигатели. В 2-х скоростных двигателях на статоре только одна переключаемая обмотка и число полюсов изменяется в два раза.
Таблица 5.1.
Соотношение магнитных индукций при разных схемах
№ |
|
|
|
||
схе-мы |
соединение полуобмоток |
соединение фаз |
соединение полуобмоток |
соединение фаз |
|
1 |
последователь-ное |
звезда Y |
параллельное |
треугольник ∆ |
|
2 |
последователь-ное |
звезда Y |
параллельное |
двойная звезда YY |
|
3 |
последователь-ное |
треугольник ∆ |
параллельное |
двойная звезда YY |
|