

5.6. Регулирование скорости вращения асинхронного двигателя изменением частоты питающей сети
Этот способ часто называют частотным регулированием. Он получил большое распространение, т.к. позволяет получить высокое качество регулирования, жесткие механические характеристики в широком диапазоне регулирования скорости вращения. Суть метода очевидна из уравнения скорости идеального холостого хода:
![]() .
.
Для реализации
этого метода необходим полупроводниковый
преобразователь, позволяющий плавно и
в широком диапазоне изменять частоту
питающей сети. В настоящее время в
качестве преобразователей применяются
чаще всего тиристорные или транзисторные
преобразователи частоты (использование
синхронных или коллекторных генераторов
в данном случае нецелесообразно -
сложность регулирования, проблемы с
коммутацией). Вместе с тем задача
регулирования частоты
![]() не так проста [9].
не так проста [9].
Оказалось, что
одновременно с изменением частоты
питающей сети
возникает необходимость изменять и
напряжение на статоре двигателя
![]() .
Как известно, приложенное напряжение
уравновешивается ЭДС двигателя и
падением напряжения на активном
сопротивлении статора. Пренебрегая
активным сопротивлением статора можно
записать, что
.
Как известно, приложенное напряжение
уравновешивается ЭДС двигателя и
падением напряжения на активном
сопротивлении статора. Пренебрегая
активным сопротивлением статора можно
записать, что
![]() ,
но ЭДС:
,
но ЭДС:
![]() ,
,
Очевидно, что
![]() ,
(5.14)
,
(5.14)
где:
![]() - постоянный коэффициент;
- постоянный коэффициент;
f1 – частота питающей сети;
Ф – магнитный поток;
![]() - число витков
обмотки.
- число витков
обмотки.
Из последнего выражения мы видим, что изменение частоты f1 нарушает баланс между приложенным напряжением и ЭДС двигателя. Для того чтобы его сохранить, необходимо изменять магнитный поток. Учитывая нелинейность магнитной цепи, изменение магнитного потока приведет к нелинейному изменению тока статора. В итоге работа АД при изменении частоты питающей сети при неизменном напряжении питания окажется невозможной При уменьшении частоты питающей сети для сохранения постоянным магнитного потока необходимо одновременно снижать и приложенное к статору напряжение, то есть возникает необходимость двухканального управления АД. Таким образом, задача регулирования частоты вращения АД является задачей регулирования двух параметров: частоты питающей сети f1 и приложенного напряжения U1 (рис. 5.9).
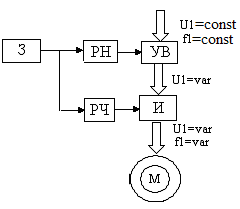
Рис. 5.9. Функциональная схема преобразователя частоты со звеном постоянного тока: УВ- управляемый выпрямитель; И– инвертор; РН- регулятор напряжения; РЧ- регулятор частоты; З- задатчик
С помощью регулятора напряжения, воздействуя на управляемый выпрямитель, изменяем напряжение на статоре Д, а с помощью регулятора частоты, воздействуя на инвертор, изменяем частоту питающей сети.
Закон изменения напряжения привода при изменении частоты питающей сети вывел академик М.Н. Костенко, полагая, что перегрузочная способность Д во всем диапазоне изменения скоростей должна оставаться неизменной, то есть:
![]() .
.
Пренебрегая активным сопротивлением фазы статора, уравнение максимального момента можно записать так:
![]() .
(5.15)
.
(5.15)
Учитывая, что
реактивное сопротивление
![]() линейно зависит от частоты, можно
записать:
линейно зависит от частоты, можно
записать:
 .
(5.16)
.
(5.16)
Учитывая, что при неизменной перегрузочной способности отношение моментов при различных скоростях должно соответствовать отношению максимальных моментов:
 ,
,
![]() .
.
В этом выражении:
![]() и
и
![]() - статические моменты при работе механизма
на скоростях соответствующих
- статические моменты при работе механизма
на скоростях соответствующих
![]() и
и
![]() ;
;
![]() и
и
![]() - напряжения, подводимые к двигателю на
тех же частотах.
- напряжения, подводимые к двигателю на
тех же частотах.
Из этого выражения видно, что закон изменения напряжения при частотном управлении определяется характером изменения статического момента нагрузки в зависимости от скорости. Рассмотрим наиболее часто встречающиеся случаи.
Нагрузка с постоянным статическим моментом
 .
Очевидно, что в этом случае:
.
Очевидно, что в этом случае:
![]() =>
=>
![]() .
(5.17)
.
(5.17)
2) Момент нагрузки растет пропорционально скорости. При этом:
 =>
=>
![]() .
(5.18)
.
(5.18)
3) Статический момент нагрузки пропорционален квадрату скорости. В этом случае:
 =>
=>
![]() .
(5.19)
.
(5.19)
Наибольшее распространение получил первый случай, как самый простой. Преобразователи с функциональным блоком изменения напряжения, реализующим второй и третий закон, используются реже, как правило, в тех случаях, когда требования нагрузки к приводу высоки.
Достоинством частотного метода является широкий диапазон регулирования и высокое качество характеристик. Механические характеристики Д будут выглядеть следующим образом (рис. 5.10).
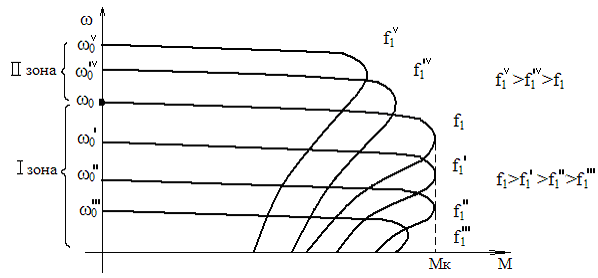
Рис. 5.10. Механические характеристики АД при
частотном методе регулирования скорости
При уменьшении частоты питающей сети реактивное сопротивление уменьшается и увеличивается влияние активного сопротивления, которым мы пренебрегаем. Это обуславливает некоторое уменьшение перегрузочной способности при низких частотах.
В частотных преобразованиях часто используют двухзонное регулирование. Вторая зона получается за счет увеличения частоты питающей сети. В этом случае имеем уменьшение критического момента, так как увеличить напряжение, пропорционально частоте, мы не можем, и перегрузочная способность снижается.
В рассмотренной системе мы изменяем напряжение для сохранения постоянным магнитного потока, т.е. задача стоит в поддержании постоянным магнитного потока (Ф = const). Если бы нам это удалось сделать непосредственно, мы бы получили лучшие характеристики, но решение задачи затрудняется сложностью измерения магнитного потока. Для его измерения необходимо расположить в воздушном зазоре двигателя несколько датчиков Холла, что довольно сложно и дорого. Либо можно измерить магнитный поток косвенно по изменению ЭДС, которая наводится в витках дополнительной обмотки статора. Но этот метод также неудобен.
На практике система стабилизации магнитного потока не нашла применения.
Для поддержания примерно постоянным магнитного потока целесообразно учесть падение напряжения в первичной цепи. Основную роль играет падение напряжения на активном сопротивлении статора. Для того чтобы учесть падение напряжения, вводят положительную обратную связь по току, которая позволяет скомпенсировать падение напряжения на активном сопротивлении статора R1 и тем самым обеспечивает более строгий закон изменения напряжения при регулировании скорости двигателя. Соответствующая схема управления называется схемой с IR – компенсацией.