

4.7.2. Система «тиристорный преобразователь – двигатель (тп-д)»
Основным типом преобразователей, применяемых в настоящее время для управления ДПТ, является тиристорный преобразователь, то есть статический полупроводниковый преобразователь. Эти преобразователи представляют управляемые реверсивные или нереверсивные, однофазные или трёхфазные выпрямители, собранные по мостовой или нулевой схеме [2; 5; 14]. Определённые перспективы развития тиристорных преобразователей связаны с использованием в них транзисторов, которые в настоящее время применяются в основном для импульсного регулирования напряжения.
Рассмотрим характеристики привода на примере использования в нем простейшего нереверсивного статического преобразователя.
Рис. 4.16. Механические
характеристики двигателя в схеме
«нереверсивный преобразователь –
двигатель»
Рис. 4.16.Схема
нереверсивного тиристорного
преобразователя
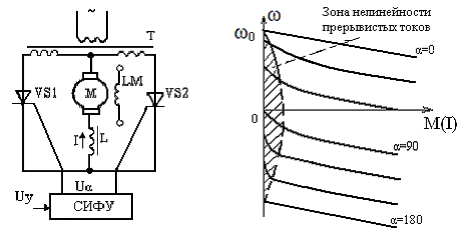
Преобразователь
включает в себя в общем случае согласующий
трансформатор Т, два тиристора VS1
и VS2,
сглаживающий дроссель L
и систему импульсно-фазового управления
(СИФУ). Преобразователь обеспечивает
регулирование напряжения на Д за счёт
изменения среднего значения ЭДС
преобразователя. Это достигается
регулированием с помощью СИФУ угла
управления
![]() тиристорами (угол
представляет собой угол задержки
открытия тиристоров относительно
момента, когда напряжение на анодах
становится положительным). Зависимость
среднего значения ЭДС от угла
для многофазного преобразователя:
тиристорами (угол
представляет собой угол задержки
открытия тиристоров относительно
момента, когда напряжение на анодах
становится положительным). Зависимость
среднего значения ЭДС от угла
для многофазного преобразователя:
![]() ,
(4.17)
,
(4.17)
где
![]() - число фаз преобразователя;
- число фаз преобразователя;
![]() - амплитудное значение ЭДС преобразователя;
- амплитудное значение ЭДС преобразователя;
![]() - ЭДС преобразователя при
- ЭДС преобразователя при
![]() .
.
В связи с пульсирующим характером ЭДС на выходе преобразователя ток в цепи Д также пульсирует. Такой характер тока оказывает вредное влияние на работу Д: ухудшаются условия коммутации, возникают дополнительные потери на нагрев. Для уменьшения пульсаций тока в цепь якоря Д включают сглаживающий дроссель. Габариты преобразователя и его вес определяются размерами дросселя и трансформатора. Уравнения электромеханической и механической характеристик имеют вид:
![]() ,
(4.18)
,
(4.18)
![]() .
(4.19)
.
(4.19)
Здесь:
![]() - эквивалентное
сопротивление преобразователя;
- эквивалентное
сопротивление преобразователя;
- число фаз преобразователя;
![]() и
и
![]() - приведённые ко вторичной обмотке
трансформатора индуктивное сопротивление
рассеянья и активное сопротивление
обмотки трансформатора;
- приведённые ко вторичной обмотке
трансформатора индуктивное сопротивление
рассеянья и активное сопротивление
обмотки трансформатора;
![]() - активное
сопротивление обмотки дросселя L.
- активное
сопротивление обмотки дросселя L.
Особенностью
характеристик Д при питании его от
управляемого выпрямителя является
наличие зоны прерывистых токов, в
пределах которой характеристики
нелинейны. Жесткость характеристик в
этой зоне резко изменяется. Вследствие
односторонней проводимости преобразователя
характеристики располагаются в первом
и четвёртом квадранте. Меньшим углам
соответствует большая ЭДС и большая
частота вращения. При
![]() ЭДС преобразователя равна нулю и мы
имеем режим динамического торможения.
ЭДС преобразователя равна нулю и мы
имеем режим динамического торможения.
Для получения характеристик Д во всех четырёх квадрантах используются реверсивные управляемые выпрямители, которые обычно составляют из двух нереверсивных. Работу во всех четырёх квадрантах можно также обеспечить и при использовании нереверсивных преобразователей, за счет изменения направления тока в обмотке возбуждения Д. В реверсивных преобразователях используют два основных принципа управления: совместное и раздельное.
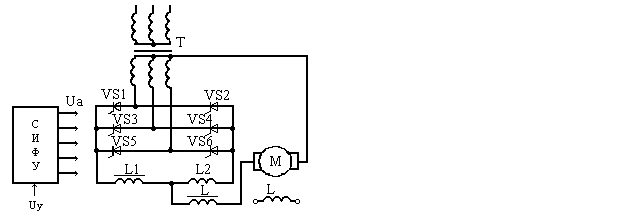
Рис. 4.17, а. Система
ТП-Д с реверсивным управляемым
выпрямителем
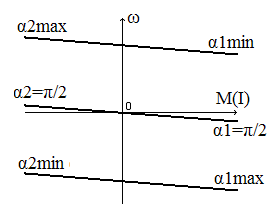
Рис. 4.17, б. Механические характеристики двигателя в системе ТП-Д с реверсивным управляемым выпрямителем
При совместном
управлении в работе участвуют все
вентили (тиристоры). При этом от СИФУ
импульсы управления, подаваемые на
катодный комплект (VS1,VS3,VS5),
и импульсы, подаваемые на анодный
комплект (VS2,VS4,VS6),
сдвинуты на угол, близкий к
![]() .
Один комплект работает в выпрямительном
режиме и проводит ток, а другой в
инверторном режиме и ток не проводит.
При этом между средними значениями ЭДС
выпрямителя и инвертора устанавливается
соотношение:
.
Один комплект работает в выпрямительном
режиме и проводит ток, а другой в
инверторном режиме и ток не проводит.
При этом между средними значениями ЭДС
выпрямителя и инвертора устанавливается
соотношение:
![]() ,
,
но
за счёт разности мгновенных значений
ЭДС между комплектами вентилей протекают
токи, называемые уравнительными. Для
их ограничения в схеме предусмотрены
реакторы
![]() и
и
![]() .
Вид механических характеристик Д зависит
от способа согласования углов управления
двумя комплектами вентилей. При линейном
согласовании сумма углов выпрямителя
.
Вид механических характеристик Д зависит
от способа согласования углов управления
двумя комплектами вентилей. При линейном
согласовании сумма углов выпрямителя
![]() и инвертора
и инвертора
![]() поддерживается равной
(то есть
поддерживается равной
(то есть
![]() ).
При этом механические характеристики
линейны во всех четырёх квадрантах и
практически соответствуют характеристикам
в системе Г-Д.
).
При этом механические характеристики
линейны во всех четырёх квадрантах и
практически соответствуют характеристикам
в системе Г-Д.
В ряде случаев для уменьшения уравнительных токов используют нелинейное согласование, при котором сумма углов управления и несколько отличается от . В этом случае уравнительные токи уменьшаются, но при переходе Д из двигательного в генераторный режим имеет место заметное увеличение скорости, то есть характеристики двигателя становятся нелинейными, поэтому этот способ согласования применяется редко.
Раздельное управление используется для полного исключения уравнительных токов. Сущность его состоит в том, что импульсы управления подаются только на один комплект вентилей, который в данный момент времени проводит ток. На второй комплект импульсы не подаются, и он закрыт. Управление преобразователем в этом случае осуществляется с помощью специального логического устройства. Это устройство осуществляет контроль за током преобразователя, обеспечивает в функции входного сигнала включение и выключение комплектов вентилей с небольшой паузой в 5-10 мс. В результате при переходе из одного режима работы в другой вблизи оси скорости наблюдается режим прерывистых токов, что приводит к нелинейности характеристик.
На сегодняшний день система ТП-Д получила наибольшее распространение из-за следующих достоинств:
Плавность и значительный диапазон регулирования скорости.
Высокая жесткость механических характеристик.
Высокий КПД электропривода (КПД преобразователя определяют КПД трансформатора 0,93-0,98 и КПД выпрямителя 0,9-0,92).
Малая инерционность, высокое быстродействие.
Бесшумность в работе, простота в обслуживании и эксплуатации.
Но наряду с этим существуют и следующие недостатки:
Односторонняя проводимость преобразователя.
Для получения характеристик во всех четырёх квадрантах необходимость использования двухкомплектного реверсивного преобразователя.
Напряжение на якоре двигателя имеет пульсирующий характер, что ухудшает его работу.
Необходимость сглаживания пульсаций приводит к применению сложных многофазных систем выпрямления и достаточно дорогих и тяжелых дросселей.
Работа управляемого выпрямителя характеризуется режимом прерывистых токов, что приводит к нелинейности характеристик.
С ростом диапазона регулирования скорости снижается коэффициент мощности (cosφ ≈ cosα; cosφ = cos(α + γ/2), где γ – угол коммутации).
Вентильный преобразователь вносит искажение в форму тока и напряжения источника питания.
Тиристорные преобразователи имеют невысокую помехозащищенность и малую перегрузочную способность.