

Лекция №4 Теория инвариантности автоматических систем управления и комбинированные аср
Вопросы, рассматриваемые в лекции:
Типовые компенсаторы.
Расчет компенсатора.
Условие приближенной инвариантности, принцип инвариантности.
Условие физической реализуемости инвариантных САР.
Абсолютной инвариантностью называют независимость координат объекта от возмущающих воздействий при любом значении времени течения процесса. Инвариантностью до называется приближенное выполнение условий независимости координат объекта от возмущений (мера близости может быть различной).
Одним из основных в теории инвариантности является вопрос о физической реализуемости условий инвариантности, который рассматривается в трех аспектах:
принципиальной возможности достижения независимости регулируемой координаты от возмущения в системе с конкретной структурной схемой;
отсутствия противоречий между условиями инвариантности и устойчивости;
возможности аппаратурной реализации условий инвариантности (физически не реализуемы звенья с порядком полинома в числителе передаточной функции более высоким, чем порядок полинома в знаменателе)
Необходимый признак осуществимости условий абсолютной инвариантности сформулирован в форме принципа двухканальности, в соответствии с которым для реализуемости абсолютно инвариантной системы в ней необходимо наличие по меньшей мере двух каналов передачи возмущающего воздействия f(t) между точкой его приложения и точкой измерения координаты, для которой достигается инвариантность. Принцип двухканальности является идейной основой при конструировании и практической реализации совершенных автоматических управляемых систем.
Основным и наиболее эффективным при применении и реализации принципа инвариантности является класс комбинированных систем автоматического управления, в которых выполняется условие двухканальности.
Комбинированные АСР
Комбинированные системы представляют собой одну из самых значительных областей применения принципа инвариантности в автоматике и управлении. В настоящее время по комбинированной схеме управления, представляющей собой сочетание систем с замкнутой и разомкнутой цепями управления, строятся почти все следящие приводы динамических платформ, многие артиллерийские следящие приводы, некоторые маломощные следящие системы, применяемые в электромеханических интеграторах, и т. п.
Комбинированные системы регулирования применяются при автоматизации объектов, подверженных действию существенных контролируемых возмущений.
Имеется два способа построения комбинированной системы.
Сигнал от компенсатора -подается на вход объекта либо на вход регулятора. Ниже приведена одна из структур комбинированной АСР.
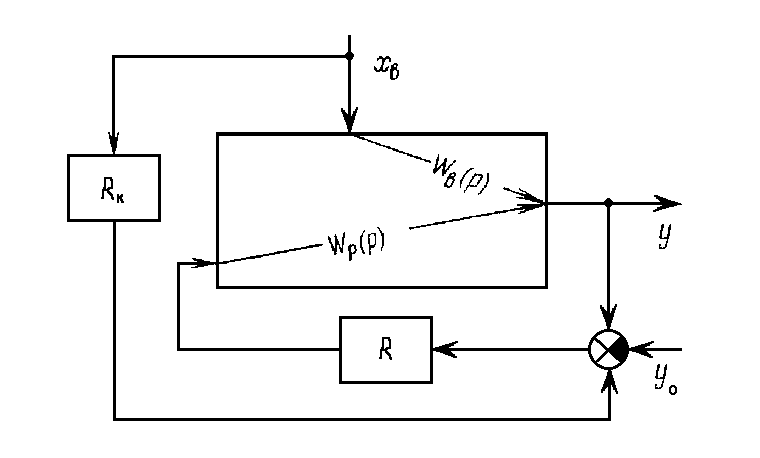
Рисунок 1 - Структурная схема комбинированной АСР при подключении выхода компенсатора на вход регулятора
Основой расчета подобных систем является принцип инвариантности: отклонение выходной координаты системы от заданного значения должно быть равным нулю при любых задающих или возмущающих воздействиях.
Рассмотрим условие инвариантности по отношению к одному возмущающему воздействию.
Y(p) = X в (p) [W в (p) + R к (p) W р (p)] . (1)
Отсюда, при наличии возмущения получим
R к (p) = - W в (p) / W р (p) . (2)
Для структурной схемы показанной на рисунке 1 уравнение примет вид:
R к (p) = - W в (p) / R (p) W р (p) . (3)
Идеальная компенсация физически нереализуема в двух случаях:
Если время чистого запаздывания по каналу регулирования больше, чем по каналу возмущения.
Если в передаточной функции компенсатора степень полинома в числители больше, чем степень полинома знаменателя.
При практической реализации разомкнутых и комбинированных АСР обычно добиваются приближенной инвариантности системы по отношению к рассматриваемому возмущению в наиболее опасном диапазоне частот. При этом реальный компенсатор выбирают из числа наиболее легко реализуемых динамических звеньев, параметры которых рассчитывают из условия близости частотных характеристик идеального и реального компенсатора в этом диапазоне частот.
[R и (i)] [R р (i)] при н в. (4)
Обычно основная мощность сигналов сосредоточена в низких частотах от 0 до в, поэтому условие приближенной инвариантности чаще всего записывают для двух частот = 0 и = р .
Расчет комбинированной АСР производят следующим образом:
1. расчет настроек регулятора и определение рабочей частоты в одноконтурной системе регулирования
2. вывод передаточной функции идеального компенсатора на условиях инвариантности и анализ его реализуемости
3. выбор реального компенсатора и определение его параметров из условий приближенной инвариантности в наиболее существенном для системы диапазоне частот
Типовые компенсаторы:
Апериодическое звено 1-го порядка - W(p) = k / (Tp+1).
Реальное дифференцирующее звено - W(p) = T1 p / (T2 p+1).
Интегро – дифференцирующее звено - W(p) = k * (T1 p+1) / (T2p+1).
Неминимально – фазовое звено - W(p) = k * (1 – T p) / (1+Tp).