

1.11 Построение лчх
Если ПФ ИС задана в D-форме, то для построения ЛЧХ нужно выполнить две операции:
Перейти от трансцендентной формы к дробно-рациональной, то есть произвести замену eq = z и W*(q) = W*(z).
Однако, при этом особый отрезок L на q-плоскости переходит в окружность единичного радиуса на плоскости z.
Для построения ЛЧХ необходимо эту окружность преобразовать в мнимую ось и при этом частота будет изменяться от -∞ до +∞. Для этих целей используется так называемое билинейное или W-преобразование.
![]()
Для практики удобнее использовать модифицированное w-преобразование:


Методика построения ЛЧХ:
1. ПФ непрерывной части представляют в виде суммы простых слагаемых.
2. Для каждого слагаемого по таблицам операционных соответствий находят z-изображение.
3. Путем суммирования всех слагаемых находят z-передаточную функцию импульсной системы.
W*(z) = TZ{W(s)}
4. Путем подстановки (1.11.1) переходят к ПФ в форме W*(w).
5.
Заменяя w=![]() ,
строят ЛЧХ по выражениям 1.11.3 и 1.11.4.
,
строят ЛЧХ по выражениям 1.11.3 и 1.11.4.
Пример: ПФ приведенной НЧ имеет вид:
![]()
Необходимо построить ЛЧХ импульсной системы с периодом квантования Т.
1) Разложим W(S) на простые слагаемые (1.11.1):
 (1.11.1)
(1.11.1)
2) С помощью таблиц Z - преобразований находим операционные соответствия

3)
Найдем ПФ
![]()
4)
Найдем ПФ

5) ЛЧХ ИС описывается следующими выражениями (1.11.2) и (1.11.3)
![]() (1.11.2)
(1.11.2)
![]() (1.11.3)
(1.11.3)
где
![]() – эквивалентная постоянная времени.
– эквивалентная постоянная времени.

Рисунок 1.11.1
Kак видно из ЛАХ (рисунок 1.11.1) в облаcти частот ω*<<2/Т ЛАХ непрерывной части L(ω) и импульсной системы L*(ω*) практически совпадают.
Аналогичный
вывод можно сделать из теоремы
Котельникова-Шеннона.
Теорема: чтобы регенерировать
(восстановить) непрерывный сигнал из
входного дискретного частота квантования
ω0
должна быть больше удвоенного значения
максимальной частоты ωm
или равна ему.
![]() .
Для систем автоматического управления
с единичной ОС величину ωm
ограничивают полосой пропускания, при
этом
.
Для систем автоматического управления
с единичной ОС величину ωm
ограничивают полосой пропускания, при
этом
![]() .
.
Таким образом
 (1.11.4)
(1.11.4)
При
выполнении последнего условия, то есть
когда частота среза меньше 2/Т импульсную
систему можно считать непрерывной.
Поскольку в рассмотренном примере
частоты сопряжения множителей
![]() лежат далеко за частотой среза, то они
практически на свойства системы влияние
не оказывают. В сложных случаях для
построения ЛЧХ используют приближенный
метод.
лежат далеко за частотой среза, то они
практически на свойства системы влияние
не оказывают. В сложных случаях для
построения ЛЧХ используют приближенный
метод.
1.12 Приближенный метод
Приближенный метод построения ЛЧХ основан на следующих допущениях:
Частота среза системы принадлежит НЧ области, т.е. ωс<2/Т, где Т – период следования импульса.
2.) ПФ приведенной непрерывной части описывается только звеньями первого порядка
 (1.12.1)
(1.12.1)
Кν – добротность, ν – порядок астатизма.
3.) Звенья знаменателя с постоянными времени Т1…Тn можно разделить на две группы:
Ti > Т/2, i=1,q
Тi < Т/2, i= q+1, n
Звенья передаточной функции непрерывной части разделяются на низкочастотные и высокочастотные, в зависимости от того где находятся частоты сопряжения . При ωi<2/T – низкочастотная (НЧ) область, при ωi >2/Т – высокочастотная (ВЧ) область.
Звенья числителя формируют НЧ область

Пересечение асимптот ЛАХ с вертикальной прямой
 возможно при наклонах «-20дБ/дек» и
«-40дб/дек».
возможно при наклонах «-20дБ/дек» и
«-40дб/дек».
Рассмотрим эти случаи отдельно.
Случай 1. Пересечение вертикальной прямой с первой асимптотой ВЧ области ЛАХ при наклоне «-20дБ/дек» .
ПФ ВЧ области запишем в виде:
![]() , (1.12.2)
, (1.12.2)
где ωов – базовая частота. Определяется как частота пересечения первой асимптоты ВЧ области с осью частот (рисунок 1.12.1).

Рисунок 1.12.1
Рассмотрим
вначале простой случай: (1.12.3)
(1.12.3)
ЛАХ ВЧ области имеет вид (рисунок 1.12.2)

Рисунок 1.12.2
Построим ЛАХ импульсной системы, соответствующей выражению (1.12.3). Разложим выражение (1.12.3) на простые слагаемые:
 (1.12.4)
(1.12.4)
Затем используя таблицу Z-преобразований, запишем
![]() (1.12.5)
(1.12.5)
![]()
Используя
W-преобразование
 ,
получим:
,
получим:
 (1.12.6)
(1.12.6)
 -
эквивалентная постоянная времени,
гиперболический котангенс определяется
выражением:
-
эквивалентная постоянная времени,
гиперболический котангенс определяется
выражением:
 ,
при
,
при
![]() ,
,
 ,
,
![]() .
.
ПФ импульсной системы в ВЧ области принимает вид:
 .
(1.12.7)
.
(1.12.7)
Тогда
импульсной системе соответствует ЛАХ
![]() ,
а непрерывной -
,
а непрерывной -
![]() (рисунок 1.12.3).
(рисунок 1.12.3).
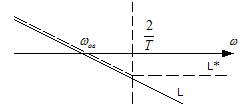
Рисунок 1.12.3
Для ПФ (1.12.6) выражения ЛЧХ имеют вид:
![]() (1.12.8)
(1.12.8)
![]() (1.12.9)
(1.12.9)

Рисунок 1.12.4
В более сложном случае (1.12.2), ПФ ВЧ области представляют в приближенном виде:
![]() ,
(1.12.10)
,
(1.12.10)
![]() наибольшая
постоянная времени,
наибольшая
постоянная времени,
![]()
![]()
 (1.12.11)
(1.12.11)
Если
![]() ,
то можно ограничиться первым членом
разложения ПФ звена запаздывания в ряд
Тейлора:
,
то можно ограничиться первым членом
разложения ПФ звена запаздывания в ряд
Тейлора:
![]() .
.
ПФ дополнительного множителя имеет вид
![]() (1.12.12)
(1.12.12)
При
τ0=0,
![]() ,
при τ0=Т,
,
при τ0=Т,
![]()
Применим w-преобразование к выражению (1.12.12).
 (1.2.13)
(1.2.13)
ПФ ВЧ области импульсной системы в этом случае имеет вид:
 (1.12.14)
(1.12.14)
Для ПФ (1.12.14) выражения ЛЧХ имеют вид:
 (1.12.15)
(1.12.15)
![]() (1.12.16)
(1.12.16)
Стыковку
ЛАХ НЧ и ВЧ областей проводят на
вертикальной прямой
 (рис.1.12.5).
(рис.1.12.5).

Рисунок 1.12.5
Случай 2. Пересечение с вертикальной прямой первой асимптоты ВЧ области ЛАХ при наклоне «-40дБ/дек».
ПФ ВЧ области запишем в виде:
 , (1.12.17)
, (1.12.17)
Рассмотрим
вначале простой случай:
![]() (1.12.18)
(1.12.18)
![]() (1.12.19)
(1.12.19)
 (1.12.20)
(1.12.20)
ЛАХ ВЧ области импульсной системы:
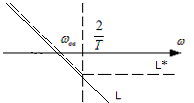
Рисунок 1.12.6
Для ПФ (1.12.20) выражения ЛЧХ имеют вид:
![]() (1.12.21)
(1.12.21)
![]() (1.12.22)
(1.12.22)
В более сложном случае, ПФ ВЧ области представляют в виде:
![]() (1.12.23)
(1.12.23)
 (1.12.24)
(1.12.24)
Для ПФ (1.12.24) выражения ЛЧХ имеют вид:
![]() (1.12.25)
(1.12.25)
![]() (1.12.26)
(1.12.26)
ЛАХ ВЧ области импульсной системы:
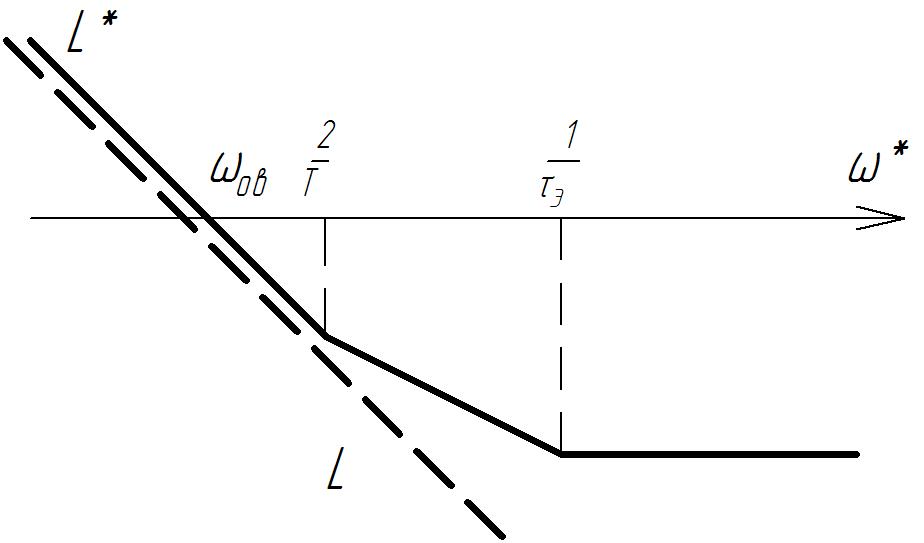
Рисунок 1.12.7