

38. Методы синтеза цифровых су им. Метод дискретизации аналоговых регуляторов класса «вход/выход» (метод аналогий). Цифровой пид- регулятор.
Методы синтеза цифровых СУ ИМ. Под синтезом СУ ИМ понимают нахождение ее структуры и параметров, обеспечивающих заданное качество управления при известных входных воздействиях.
На практике задачу синтеза начинают с того, что задают структуру и параметры неизменяемой части СУ ЭП. К неизменяемой части СУ ЭП относят ОУ, включающий все тех. средства, преобразующие управляющее воздействие в выходную координату (приводы, передат. механизмы), а также датчики измеряемых координат, устройства преобразования и передачи информации от объекта к устройству управления.
На предварительном этапе синтеза выбирают элементы ОУ из числа типовых изделий, основываясь на основных условиях его функционирования. Далее составляется мат. модель ОУ. После определения неизменяемой части ОУ переходят к синтезу структуры и параметров устройства управления. При этом используют несколько подходов.
Первый подход базируется на задании конкретной структуры устройства управления. Как правило, задаются типовыми регуляторами класса “вход-выход” или простейшими корректирующими звеньями. Корректирующие звенья размещают последовательно с ОУ, в ряде случаев хор. эффект дает установка их в канале обратной связи или на входе системы. Далее решается задача параметрического синтеза, удовлетворяющего требованиям к статике и динамике замкнутой СУ ЭП.
Второй подход основывается на составлении структурной схемы системы управления без задания собственно структуры регуляторов: выбирается число контуров регулирования, их соподчиненность, расположение регуляторов в структуре устройства управления и др. В основе подхода - избранные принципы управления и требования к статическим и динамическим показателям системы. Т.о, при таком подходе посл-но решаются задачи структурного и параметрического синтеза регуляторов.
Третий подход основан на синтезе оптимальных СУ ЭП в смысле заданного критерия качества управления при заданных ограничениях на ресурсы управления. При таком подходе задается формальный критерий качества. Результат синтеза – структура и параметры устройства управления, удовлетворяющих требуемому качеству управления. Системы управления, синтезированные на основе двух первых подходов, часто называют системами со стабилизируемыми показателями качества управления. Системы управления, синтезированные на основе третьего подхода, называют системами с оптимизируемым показателем качества управления.
Метод дискретизации аналоговых регуляторов класса “вход - выход”. Данный метод основан на применении процедур синтеза линейных аналоговых САУ. В качестве критериев оптимальности принимают общепринятые при синтезе таких систем интегральные квадратичные функционалы, а, след-но, динамические процессы в оптимизированных контурах регулирования соот-ют реакциям оптимальных фильтров, напр. фильтров Баттерворта n-го порядка. Синтезированное аналоговое устройство управления содержит один или несколько последовательно включенных регуляторов (корректирующих устройств) класса “вход/выход”.
Суть метода заключается в замене передаточных функций синтезированных непрерывных регуляторов их дискретными аналогами. Отсюда и второе название данного метода синтеза – метод аналогий. Для преобразования аналоговых передаточных функций регуляторов в дискретные применяют замену непрерывных операторов p Лапласа их дискретным аналогом z = f(p). В качестве примера рассмотрим дискретизацию непрерывного ПИД-закона регулирования. Процедура преобразования иллюстрируется рис.1. Входным воздействием регулятора является ошибка регулирования (e(t) для непрерывного и e(kT) для дискретного), выходным – сигнал управления (u (t) для непрерывного и u (kT) для дискретного).
Приведенное преобразование основано на замене:
![]() - при формировании интегральной
составляющей ПИД–закона регулирования;
- при формировании интегральной
составляющей ПИД–закона регулирования;
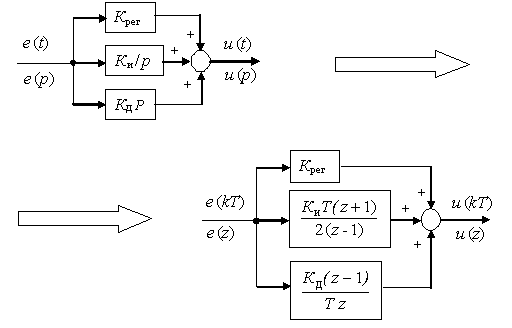
Рис. 1. Преобразование непрерывного ПИД- регулятора в его
дискретный аналог
![]() - при формировании дифференциальной
составляющей ПИД–закона регулирования.
- при формировании дифференциальной
составляющей ПИД–закона регулирования.
Параметры Крег , Ки , КД получены в результате синтеза аналогового ПИД- регулятора, Т – временной интервал между двумя соседними значениями управляющего воздействия (такт управления).
Применение этого метода синтеза предполагает, что дискретизацией аналоговых сигналов по уровню можно пренебречь, такт управления достаточно мал (как правило, на порядок меньше минимальной постоянной времени объекта управления), а также предполагатся что периоды прерывания Т импульсного элемента датчиков обратной связи и регуляторов одинаковы и неизменны, причем синхронизированы во времени.
Применительно к цифровым электромеханическим САУ такт прерывания не должен превышать 0,005 с. Обеспечение этих условий позволяет получить динамические характеристики цифровой САУ практически такие же, что и в непрерывной системе.