

2. Рксу ад с фазным ротором
РКСУ – это простейшие системы разомкнутого управления с приводами пост. и перем. тока, реализующие пуско-тормозные режимы ЭП.
Различают режимы пуска до номинальной ск-ти в несколько ступеней или до промежуточных скоростей, торможения и реверса (изменения направления вращения).
АД с фазным ротором позволяет осущ-ть не только пуско-тормозные режимы, но и реализовать эффективное параметрич. рег-ие ск-ти дв-ля по цепи ротора. Применение РКСУ в этом случае позволяет достаточно просто осущ-ть многоступенчатые пуск, торможение и реверс и, тем самым, эффективнее использовать возм-ти разомкнутого упр-ия производств. установками. Многоступенчатые пуско-тормозные режимы АД с фазным ротором реализуют, как правило, в ф-ции времени, иногда – в ф-ции электромагнитного момента, тока статора или ротора.
Параметрич. рег-ие ск-ти АД с фазным ротором основано на введении добавочных сопр-ний в фазы ротора. Такой способ рег-ия имеет существ. недостаток – большие потери энергии, выделяемой в виде тепла при протекании тока в роторной цепи.
Для реализации пуско-тормозных режимов исп-тся пром. панели упр-ия: ПУ-6520.
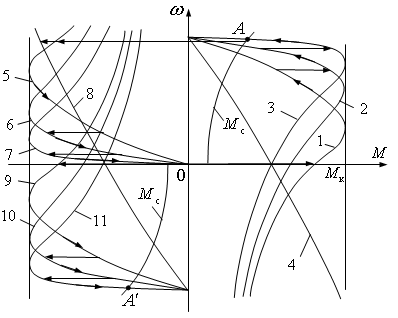
Пуск АД производится в 3 ступени: вначале контактором KM6 отключается ступень противовключения (закорачиваются резисторы R1) и пуск происходит по искусственной хар-ке 1. Затем с выдержками времени T1 и T2 происходит последовательное срабатывание контакторов KM7, KM8. Пуск происходит по искусственной хар-ке 2, затем по естественной хар-ке 3 до точки А установившегося состояния. Выдержки времени формируются с помощью реле ускорения и могут вручную подстраиваться на стадии наладки СУ ЭП. Применение семипозиционного командоконтроллера позволяет осуществлять разгон не только до номинальной скорости АД, но и до 2-х промежуточных скоростей.
Динамическое торможение реализуется также в функции времени в 3 ступени (см. хар-ки 5, 6 и 7) при подключении контактором KM4 2-х фаз статора к цепи пост. тока.
Реверс АД производится торможением двигателя в режиме противовключения (см. хар-ку 9) при полностью введенных сопротивлениях в цепи ротора. При скорости АД, близкой к нулевому значению ступень противовключения отключается (закорачиваются резисторы R1) и происходит пуск Д в обратном направлении (см. хар-ки 9, 10 и 11).
В крановых электроприводах подъема применяют более сложные принципы и панели РКСУ, такие как ТСД-60. При этом для получения жестких механических характеристик АД в зоне малых скоростей подъема реализуют тиристорное широтно-импульсное регулирование.
3. Рксу двигателем постоянного тока
Пуско-тормозные режимы РКСУ ДПТ реализуют с применение параметрического рег-ия скорости в функции ЭДС, тока якоря или времени. Прямой пуск ДПТ применяют только для машин малой мощности (десятки-сотни ватт).
П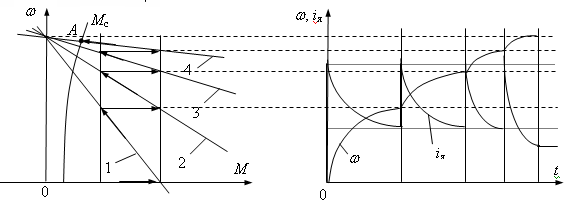 уск
двигателя осущ-тся по самой мягкой
искусственной хар-ке 1 (рис.). Процесс
пуска ДПТ происходит в 4 ступени до точки
А установившегося режима.
уск
двигателя осущ-тся по самой мягкой
искусственной хар-ке 1 (рис.). Процесс
пуска ДПТ происходит в 4 ступени до точки
А установившегося режима.
Упр-ие тормозными режимами ДПТ осуществляется по принципу ЭДС (в функции ЭДС двигателя).
35. С-мы стабилизации. Типовые методы улучшения динам. показателей СУИМ: форсирование управляющего воздействия, компенсация БПВ объекта упр-ия.
К таким САУ относятся СУ с непрерывным технологическим процессом (непрерывные прокатные станы, бумагоделательные машины, установки для производства полимерных материалов и др.).
Требования к системам стабилизации в статике:
1.обеспечение
статической точности рег-ия выходной
координаты
![]() ;
;
2.обеспечение диапазона рег-ия выходной к-ты с заданной статической точностью
![]() ,
где
,
где
![]()
Требования к системам стабилизации в динамике:
а) в частотной области:
- обеспечение требуемой полосы пропускания замкнутого контура или частоты среза разомкнутого контура регулирования (Гц);
- обеспечение требуемых запасов по амплитуде и фазе логарифмической частотной характеристики (L, );
б) во временной области:
- обеспечение динамической точности стабилизации выходной координаты xвых(t);
- обеспечение быстродействия отработки ошибок регулирования при изменениях задающих и возмущающих воздействий (с);
- обеспечение требования к допустимому перерегулированию (%), колебательности выходной координаты xвых(t) (число колебаний) и т.п.