

1. Энергитические показатели
трансформатора. Какие потери покрываются
мощностью ХХ
![]() и мощностью КЗ
и мощностью КЗ
![]() .
Для чего производят опыт ХХ и КЗ трансф-ра?
Что такое КПД трансф-ра и как его
определить, используя данные опыта ХХ
и КЗ?
.
Для чего производят опыт ХХ и КЗ трансф-ра?
Что такое КПД трансф-ра и как его
определить, используя данные опыта ХХ
и КЗ?
Мощность, потребляемая
трансф-ром при ХХ идет на покрытие потерь
в обмотках и стали (магнитные потери):
P0 = p
эл1 + Pмагн ;
![]() ,
pэл1 = 1
2% от P0
,
pэл1 = 1
2% от P0
→м-ть при ХХ трансф-ра идет на покрытие потерь в стали (гистерезис и вихревые токи).
p r
= r(f/100)B2
r
зависит от величины листа
r
= r(f/100)B2
r
зависит от величины листа
Pосн мг
p вх
= вх(f/100)2B2
вх
зависит от процентного сод-ия кремния
в стали
вх
= вх(f/100)2B2
вх
зависит от процентного сод-ия кремния
в стали
pдоб = 15 20% Pосн мг Итак P0 = (1,15 1,2) Pмго
При КЗ трансф-р
потребляет из сети активную мощность.
Эта мощность в основном идет на покрытие
потерь в обмотках:
![]() .
.
Т.к. при КЗ текут номинальные токи I1 и I2, а вся м-ть трансф-ра идет на нагрев обмоток, так как I0=0, Ф0=0, то есть потери в стали равны нулю.Т.к. потери в стали pмг = B2 ; B U
При КЗ напряжение ↓в 1520 раз, потери в стали ничтожно малы и ими пренебрегаем.
Опыт ХХ.
Для определения к-та трансформации,
потерь в стали и параметров цепи
намагничивания. По данным опыта можно
рассчитать (z0=![]() ;
r0=
;
r0=![]() ;
x0=
;
x0=![]() ;
r1<<rm;
x1<<xm):
1.
;
r1<<rm;
x1<<xm):
1.![]() ;2.
;2.![]() ;3.акт.сопр.
цепи намагн-ия: rm
r0
=
;4.
zm
z0 =
;5.
xm
x0 =
.
;3.акт.сопр.
цепи намагн-ия: rm
r0
=
;4.
zm
z0 =
;5.
xm
x0 =
.
Опыт КЗ. Для определения напряжения
КЗ, потерь в меди обмоток и сопротивлений
КЗ. Определяют: 1.![]() ;2.
;2.![]() ;
;
![]() ;
3.
;
3.![]() ;
4.полное сопр. КЗ:
;
4.полное сопр. КЗ:
![]() ;
5.индукт.сопротивление КЗ:
;
5.индукт.сопротивление КЗ:
![]() .
.
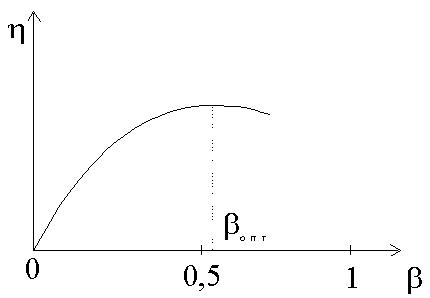
Используя опыты ХХ и КЗ получают все нагруз.хар-ки, задаваясь β.
КПД трансформатора– это отношение мощности, отдаваемой трансформатором в нагрузку, к мощности потребляемой им из сети, то есть n = Р2/Р1, n (%) =( Р2/Р1) 100.
Через
опыты ХХ и КЗ:
![]() ;
; При ХХ P0 = PМГ.
При КЗ PК= PЭЛ1,2
= I2rк,
При ХХ P0 = PМГ.
При КЗ PК= PЭЛ1,2
= I2rк,
![]() - коэффициент нагрузки.
- коэффициент нагрузки.
Тогда
![]() ;
PКH
– мощность КЗ при номинальном токе IH,
;
PКH
– мощность КЗ при номинальном токе IH,
![]() ,
тогда
,
тогда

Задаваясь = 0,25; 0,5; 0.75; 1.0; 1.25 при cos2 = const построим зависимость = f().
Максимум наступает тогда, когда потери в стали равны потерям в меди.
p0
= 2РКН
, откуда
![]()
2. Параллельная работа трансформаторов.
Какие условия необходимо выполнить
для нормальной параллельной работы
трансформаторов? К чему приведет, если
трансформатор 1 и трансформатор 2 имеют
различные коэффициенты трансформации
![]() ?
?
Условия:
1.Напряжения первичных и вторичных обм-к трансф-ров одинаковы, т.е. KI = KII = KIII = …, причем обмотки трансф-ров д. б. включены одноименными зажимами (а1 с а2 и т.д. ) на одну шину, чтобы индуктированные во вторичных обмотках ЭДС были равны и направлены встречно, и их геометрическая сумма равнялась нулю, тогда между трансф-ми не возникнет никаких токов. Если это условие не выпол-няется, то появляется составляющая ΔЕ2, которая создает между трансф-ми уравнительные токи Iур, а т. к. сопротивления КЗ обмоток малы, то Iур может быть очень велик.
2.Напряжения КЗ одинаковы, т.е. UKI = UKII = UKIII. Если эти напряжения не равны, то нагрузка между трансф-ми распределяется неравномерно у трансф-ра с меньшим Uкз нагрузка будет выше.
3.Группы соединения одинаковы. Если группы одинаковы, то и вектора линейных ЭДС вторичных обмоток совпадают, и уравнительных токов нет. Если группы трансф-ров неодинаковы, то эти вектора не совпадают по фазе, и их геометрическая сумма не равна нулю, значит появляются большие уравнит. токи. Кроме того, мощн-ть параллельно работ-х трансф-ров не должна отличаться более чем в 3 раза.
Параллельная работа трансф-ров при неравенстве коэффициентов трансформации
Начнем с того, что KI = KII
При равенстве KI
= KII вторичные ЭДС Е2I
и Е2II равны и
по контуру направлены встречно и их
сумма равна 0 т.е. при этом не будет
никаких уравнит. токов. Теперь пусть KI
< KII
т.е. E2I
> E2II
(U2I
> U2II).
В этом случае при ХХ сумма напряжений
по контуру не равна нулю, а значит будет
уравнительный ток. Появится
![]() ,
,
![]() .
.
Учтем для простоты только индукт. сопротивления, т.к. акт. сопротивления малы, тогда
![]() ,
,
![]()
создает в обмотках потоки, которые
создают ЭДС
создает в обмотках потоки, которые
создают ЭДС
![]() и
и
![]() которые выравнивают напряжение до U2
на шинах.
которые выравнивают напряжение до U2
на шинах.
У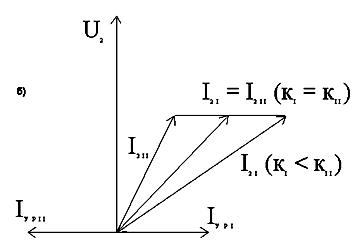 равнительный
ток будет существовать и при нагрузке.
Он будет для каждого трансформатора
складываться с нагрузочным током
геометрически. Из диаграммы (б) видно,
что в том трансф-ре, где кI
меньше (напряжение больше) трансф-р
перегружен. Т.е. получается, что первый
трансформатор перегружен, а второй
недогружен. Разница в коэффициентах
трансформации должна быть не более 0,5%
от их среднего значения.
равнительный
ток будет существовать и при нагрузке.
Он будет для каждого трансформатора
складываться с нагрузочным током
геометрически. Из диаграммы (б) видно,
что в том трансф-ре, где кI
меньше (напряжение больше) трансф-р
перегружен. Т.е. получается, что первый
трансформатор перегружен, а второй
недогружен. Разница в коэффициентах
трансформации должна быть не более 0,5%
от их среднего значения.
![]() ,
где
,
где
![]()
среднее геометрическое.
среднее геометрическое.
Если тр-р меньшей мощности включается в параллельную работу, то он должен иметь больший к-т трансформации.
3. Группы соединения трансформаторов. Что такое группа соединения трансф-ров и от чего она зависит? Покажите 12 и 11 группу трансф-ров. Возможна ли параллельная работа трансф-ров с различными группами соединения?
Группой соединения трансф-ра называется угол сдвига между линейными ЭДС первичной и вторичной обмоток трансф-ра. За первичную обмотку принимают обмотку высокого напряжения. При обозначении группы соединений пользуются аналогией с часовым циферблатом. При этом вектор линейной ЭДС первичной обмотки мысленно совмещают с минутной стрелкой часов, расположенной на цифре 12, а с направлением вектора вторичной линейной ЭДС совмещают часовую стрелку. Цифра, на которой она расположена, определяет группу соединения трансф-ра. Угловое расстояние между двумя соседними цифрами циферблата составляет 30°. Поэтому для определения угла сдвига линейных ЭДС обмоток следует умножить номер группы на 30°.
Группа соединения зависит от:
от направления намотки;
маркировки концов обмотки;
схемы соединения обмоток.
Стандартными являются две группы соединений — 12 и 11:
1)
соединение
![]() /;
2)
соединение
/
.
/;
2)
соединение
/
.
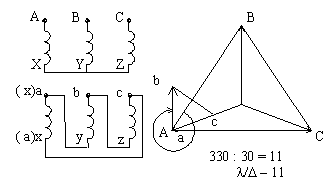
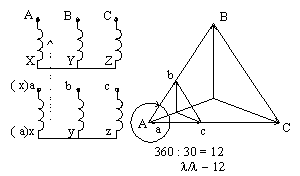
Группы соединения необходимо знать для включения трансформаторов на параллельную работу. При различных группах соединений параллельно работающих трансформаторов между векторами их вторичных напряжений будет сдвиг фаз, вызывающий уравнительные токи между обмотками трансформаторов. При разных группах соединений, при самом малом сдвиге фаз, равном 30°, уравнительный ток превышает номинальный ток трансформатора в 5 раз, при самом большом сдвиге 180° — в 20 раз.
Возьмем для примера 12 и 11 группу
 E
= 2E2Isin15
= 0,52E2I,
тогда
E
= 2E2Isin15
= 0,52E2I,
тогда
![]() ,
что составляет 26% от установившегося
тока короткого замыкания, что примерно
в 3-5 раз превысит номинальный ток.
Поэтому параллельная работа трансформаторов
с различными группами соединения
недопустима.
,
что составляет 26% от установившегося
тока короткого замыкания, что примерно
в 3-5 раз превысит номинальный ток.
Поэтому параллельная работа трансформаторов
с различными группами соединения
недопустима.
4. Моменты асинхронного двигателя.
Чем создается
электромагнитный (вращающий) момент
асинхронного двигателя? Запишите
выражение зависимости
![]() и поясните физическую сущность. Запишите
выражение зависимости
при
и поясните физическую сущность. Запишите
выражение зависимости
при
![]() (акт. R вторичн. обмотки +
R реостата). Запишите
выражение расчетной формулы момента и
поясните физическую сущность.
(акт. R вторичн. обмотки +
R реостата). Запишите
выражение расчетной формулы момента и
поясните физическую сущность.
М - электромагнитный момент, создаваемый в резе взаимодействия вращающего магнитного поля с током в роторе. Электромагнитный момент двигателя должен уравновесить момент на валу – М2 и момент холостого хода М = М2 + М0.
П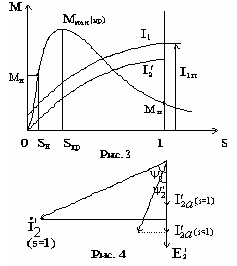 ояснение
зависимости M = f(S):
ояснение
зависимости M = f(S):
1.Область от S = 0 Sкр
При малом скольжении X2S=Х2S
0, тогда ток в роторе
![]() активному току, с увеличением МВ
S Ф=const
активному току, с увеличением МВ
S Ф=const
![]()
![]() M
M
В области Mmax начинает проявляться
индуктивное сопротивление X2S. При
Mmax самая большая
![]() .
.
2.Область скольжений S = Sкр 1
S
![]() X2S
X2S
![]() (угол
сдвига)
(угол
сдвига)
![]() M
M
3.Ток, при S = 1 равен пусковому, который в 57 раз больше номинального. И момент равен начальному пусковому моменту.
4.При S = 0 ток I1 0, т.к. при S = 0 двигателем потребляется реакт. мощность для создания вращающего поля, кроме того, двигателем потребляется активная мощность на покрытие потерь в статоре.
При S = 0 ток ротора
![]() ,
т.к.
,
т.к.
![]()
Кривая зависимости M = f(S) характеризуется тремя моментами: 1) пусковой момент Мп при S = 1; 2) максимальный момент Мmax Sкр; 3) номинальный момент МН SН.
Отношение макс. (критического) момента
к номинальному, называется перегрузочной
способностью.
![]() Максимальный (критический)
момент АМ
Максимальный (критический)
момент АМ
 соотв. макс. моменту.
соотв. макс. моменту.

Зависимость электромагнитного момента от скольжения называется механической характеристикой. Из выражения видно, что электромагнитный момент асинхронного двигателя зависит от квадрата подведенного напряжения, т.е. если U уменьшить на 10%, то момент уменьшится на 19%.
Знак ‘+’ соотв-т двигат. режиму, ‘-‘ генерат. режиму.
При генераторном режиме
![]() .
.
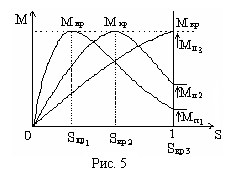
Из выражения Мкр опр-тся квадратом
напряж., не зависит от акт. сопр. роторной
цепи, но влияет на его расположение.
Если сопротивление рот. цепи ,
то Sкри кривая
момента смещается вправо
![]() ,
,
![]()
Ч ем
больше акт. сопр. в роторной цепи, тем
больше пуск. момент и меньше пуск. ток.
Это ценное свойство используется в
двигателях с фазным ротором.
ем
больше акт. сопр. в роторной цепи, тем
больше пуск. момент и меньше пуск. ток.
Это ценное свойство используется в
двигателях с фазным ротором.
Расчетная формула момента:
![]() ,
показывает, что момент асинхронного
двигателя пропорционален потоку и
активной составляющей тока ротора.
,
показывает, что момент асинхронного
двигателя пропорционален потоку и
активной составляющей тока ротора.
5. Поясните устройство и принцип действия генератора и дв-ля постоянного тока. Назначение и устройство коллектора в машинах постоянного тока (покажите принцип выпрямления эдс).
Устройство и принцип действия машин постоянного тока
Э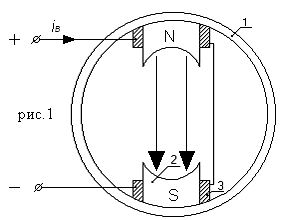 ДС,
наводимая в проводнике, получается за
счет того, что проводник пересекает
магнитное поле со скоростью
ДС,
наводимая в проводнике, получается за
счет того, что проводник пересекает
магнитное поле со скоростью
![]() .
.
1.Неподвижная часть – индуктор создает магн.поток. К станине (1) крепятся шматованные полюса (2) на которых располагается обмотка возбуждения (3) (рис. 1).
ОВ создает магн. поток при протекании по ней постоянного тока.
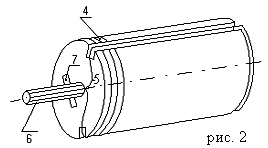 2.Якорь
(индуцируется ЭДС). Якорь вращается.
Представляет собой цилиндр, набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).
2.Якорь
(индуцируется ЭДС). Якорь вращается.
Представляет собой цилиндр, набранный
из листов электротехнической стали
(4).В наружной части якоря расположены
пазы, где укладываются секции обмотки
(5). Каждая секция соединяется с пластинами
коллектора (6).
К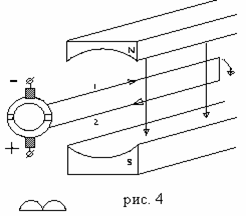 служит для выпрямления переем. ЭДС в
постоянную величину (режим генератора).
Эта ЭДС снимается с помощью щеток (7),
рис. 2. Рассмотрим принцип
выпрямления:
(рис.4). Виток подсоединен к двум кольцам
и вращается в магнитном поле. При вращении
витка в проводниках (1,2) будет наводиться
переменная ЭДС (под северным полюсом
одно направление, а под южным другое).
Снятое со щеток напряжение будет иметь
sin
хар-р.
служит для выпрямления переем. ЭДС в
постоянную величину (режим генератора).
Эта ЭДС снимается с помощью щеток (7),
рис. 2. Рассмотрим принцип
выпрямления:
(рис.4). Виток подсоединен к двум кольцам
и вращается в магнитном поле. При вращении
витка в проводниках (1,2) будет наводиться
переменная ЭДС (под северным полюсом
одно направление, а под южным другое).
Снятое со щеток напряжение будет иметь
sin
хар-р.
К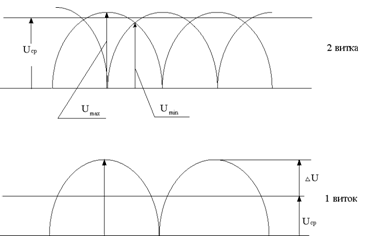 состоит из двух изолир-х между собой
медных пластин, выполненных в форме
полуколец, к которым присоединены концы
витка обмотки якоря. Пластины коллектора
соприкасаются с неподвижными контактными
щетками, которые связаны с внешней
электрической цепью. При работе К
вращается вместе с витками обмотки
якоря. Щетки устан-тся таким образом,
что в то время, когда ЭДС витка меняет
свой знак на обратный, коллект. пластина
перемещается от одной полярности к
другой, приходя в соприкосновение со
щеткой другой полярности. В результате
этого на щетках возникает пульсирующее
напряжение, постоянное по направлению.
Для внешней цепи «+» будет на нижней
щетке, а «-» на верхней. При одном витке
выпрямленная ЭДС будет иметь большую
пульсацию.
состоит из двух изолир-х между собой
медных пластин, выполненных в форме
полуколец, к которым присоединены концы
витка обмотки якоря. Пластины коллектора
соприкасаются с неподвижными контактными
щетками, которые связаны с внешней
электрической цепью. При работе К
вращается вместе с витками обмотки
якоря. Щетки устан-тся таким образом,
что в то время, когда ЭДС витка меняет
свой знак на обратный, коллект. пластина
перемещается от одной полярности к
другой, приходя в соприкосновение со
щеткой другой полярности. В результате
этого на щетках возникает пульсирующее
напряжение, постоянное по направлению.
Для внешней цепи «+» будет на нижней
щетке, а «-» на верхней. При одном витке
выпрямленная ЭДС будет иметь большую
пульсацию.
При
одном витке
![]()
![]() с ↑числа коллект-х пластин на полюс
пульсация ЭДС↓: если
с ↑числа коллект-х пластин на полюс
пульсация ЭДС↓: если
![]() ,
то
.
При
,
то
.
При
![]() ,
,
![]() ,
то
,
то
![]()
![]() ,
то
,
то
![]() .
.
4-6-4. Регулирование частоты вращения двигателей постоянного тока
Можно регулировать
скорость за счет изменения сопротивления
в цепи якоря, потока и подводимого
напряжения. Это видно из формулы:
![]()
4-6-5. Регулирование частоты вращения сопротивлением в цепи якоря.
У равнения
токов до и после введения сопротивления
равнения
токов до и после введения сопротивления
![]() ,
,
![]() ,
откуда
,
откуда
![]() ,
т. е. ток
,
т. е. ток
![]() и момент уменьшается (
и момент уменьшается (![]() )
.
)
.
При
этом
![]() и
скорость
и
скорость
![]() уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
уменьшается. С уменьшением скорости
ток якоря возрастает, и он достигнет
исходного тока якоря, но при меньшей
скорости
.
Переходный процесс показан на рис. 230.
Р егулирование
частоты вращения сопротивлением в цепи
якоря осуществляется в сторону уменьшения
скорости, рис. 231.
егулирование
частоты вращения сопротивлением в цепи
якоря осуществляется в сторону уменьшения
скорости, рис. 231.
Но так
как ток якоря протекает по Rр,
то увеличиваются общие потери, и снижается
кпд. При постоянном токе, за счет
увеличения падения напряжения
![]() ,
скорость двигателя уменьшается.
,
скорость двигателя уменьшается.
4-6-5-2. Регулирование частоты вращения за счет изменения потока.
Т ок
якоря до и после изменения потока
ок
якоря до и после изменения потока
![]() ,
,
![]() ,
их отношение
,
их отношение
![]() .
Уравнение моментов
.
Уменьшим поток на
.
Уравнение моментов
.
Уменьшим поток на
![]() ,
т. е.
,
т. е.
![]() ,
,
![]() .
Напряжение примем за единицу, тогда
.
Напряжение примем за единицу, тогда
![]() .
.
Ток
якоря возрос в 3,3 раза, тогда
![]() ,
то
,
то
![]() и
и
![]() (возрастает).
Переходный процесс представлен на рис.
232.
(возрастает).
Переходный процесс представлен на рис.
232.
С увеличением скорости вращения, ток
якоря будет уменьшаться, но он будет
больше исходного![]() ,
т. к. уменьшен поток.
,
т. к. уменьшен поток.

При уменьшении потока частота вращения возрастает, рис 233.
Как правило, регулирование частоты вращения изменением потока производят в сторону увеличения. В сторону уменьшения регулирования малоэффективно из-за насыщения магнитной цепи.
4-6-5-3. Регулирование частоты вращения изменением подводимого напряжения.
Регулирование частоты вращения изменением подводимого напряжения производится следующими способами:
А) Система генератор-двигатель (Г-Д).
Б) Тиристорный преобразователь-двигатель (ТП-Д).
В) Широтно-импульсное регулирование.
А) Система Г-Д, рис.234.
![]()
Увеличивая ток возбуждения генератора iвг, возрастает поток Фг и Ег, а следовательно увеличивается напряжение на якоре двигателя и скорость возрастает. Регулирование происходит плавно при малых потерях энергии, рис. 234.
Эта система используется при большой мощности двигателя (подъёмники, прокатные станы, экскаваторы и т.д).
Б) Тиристорный преобразователь-двигатель.
В системе Г-Д используется большое число машин, что увеличивает стоимость установки и снижает надежность.
П оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.235.
оэтому
в последнее время для регулируемого
напряжения все чаще используются
статические преобразователи, рис.235.
![]()
Увеличивая угол управления
![]() - площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
- площадь полупериода уменьшается,
уменьшается среднее значение напряжения
- Uср, а следовательно
уменьшается скорость вращения.
В) Широтно-импульсное регулирование.
И ельность
подключения двигателя ключом (К) к сети,
изменяется среднее значение напряжения,
рис. 236. В качестве ключа используются
схемы на базе тиристоров или транзисторов.
ельность
подключения двигателя ключом (К) к сети,
изменяется среднее значение напряжения,
рис. 236. В качестве ключа используются
схемы на базе тиристоров или транзисторов.
Изменяя
время импульса tи
изменяется скважность
![]() ,
,
где tи - время импульса;
tп - время паузы.
С
Рис. 236
![]() .
.
Как видим, изменяя среднее значение напряжения, можно регулировать частоту вращения двигателя. Эта система широко используется вместо контактарно-резисторных систем.
6. Синхронный двигатель. Пояснить устройство синхронного двигателя и принцип его работы. Поясните работу СД при недовозбужденнии и перевозбужденнии (ib=var), используя векторную диаграмму.
С
 инхронной
машиной переменного тока называется
такая машина, скорость которой находится
в строгой зависимости от частоты. Ротор
вращается с такой же скоростью, что и
поле статора.
инхронной
машиной переменного тока называется
такая машина, скорость которой находится
в строгой зависимости от частоты. Ротор
вращается с такой же скоростью, что и
поле статора.
![]() .
.
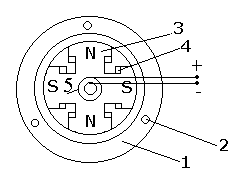
Статор (якорь) синхронной машины аналогичен асинхронной машине. Он набирается из листов электротехнической стали (1). В пазах статора расположены три фазы, сдвинутые относительно друг друга на 120 электрических градусов (2), (3) индуктор явнополюсной машины, (4) обмотка возбуждения, (5) контактные кольца. На роторе расположена обмотка возбуждения (2), которая питается от источника постоянного тока. Обмотку возбуждения в такой машине размещают в пазах сердечника ротора, выполненного из массивной стальной поковки высококачественной стали, и укрепляют немагнитными клиньями.
При мощности выше 300 КВт, синхронные двигатели имеют по сравнению с асинхронными большое преимущество, заключающееся в том, что благодаря возбуждению постоянным током они могут работать с cosφ = 1 и не потребляют при этом реактивной мощности из сети, а при работе с перевозбуждением даже отдавать реактивную мощность в сеть. В результате улучшается коэффициент мощности сети и уменьшается падение напряжения и потери в ней.


Из рис. 35-15 следует, что при непрерывном
изменении тока возбуждения -
![]() ток
ток
![]() и
и
![]() также беспрерывно изменяются, причем
при некотором значении
величина
минимальна и
= 1, а при увеличении
(режим перевозбуждения) и уменьшении
(режим недовозбуждения) против указанного
значения
величина тока
возрастает,
так как растет его реактивная составляющая.
также беспрерывно изменяются, причем
при некотором значении
величина
минимальна и
= 1, а при увеличении
(режим перевозбуждения) и уменьшении
(режим недовозбуждения) против указанного
значения
величина тока
возрастает,
так как растет его реактивная составляющая.
На рис.
35-16 представлен характер зависимостей
![]() при
разных значениях
при
разных значениях
![]() .
.
Минимальное значение
для
каждой кривой определяет активную
составляющую тока якоря
![]() и
величину мощности
и
величину мощности
![]() для которой построена данная кривая.
Нижняя кривая соответствует Р = 0,
причем
для которой построена данная кривая.
Нижняя кривая соответствует Р = 0,
причем
![]() —
значение тока возбуждения при Е = U.
—
значение тока возбуждения при Е = U.
![]() ,
E0sinθ=const,
P=mUcIcosφ=const, Icosφ=Ia=const.
,
E0sinθ=const,
P=mUcIcosφ=const, Icosφ=Ia=const.
Правые части кривых соответствуют перевозбужденной машине и отдаче в сеть индуктивного тока и реактивной мощности, а левые части — недовозбужденной машине, отдаче в сеть емкостного тока и потреблению реактивной мощности. Точка А на рис. 35-16 соответствует холостому ходу невозбужденной машины. Если изменять iB, то величина тока статора I будет измен. по величине и по фазе, т.е. можно рег-ть cosφ. Это св-во и определяет использование СД. Выпускаются СД обычно с опережающим cosφ=0.8. При Ia=I1 и будет минимальным. При этом режиме СД будет работать с cosφ=1 и реактивная мощность, не будет ни потребляться, ни отдаваться в сеть.
Асинхронный пуск двигателя. СД на время пуска превращается в асинхр. В пазах полюсных наконечников явнополюсного дв-ля помещается пуск. КЗ обмотка.
Ротор разгоняется до скольжения близкого к нулю (S=0,05), до подсинхр. скорости. На этом заканчивается первый этап.
Чтобы ротор дв-ля втянулся в синхронизм, необходимо создать в нем магнитное поле. Так как ротор разогнан до скорости близкой к синхронной, то относительная скорость поля статора и ротора небольшая. Полюса плавно притянутся, и ротор втянется в синхронизм. После чего ротор будет вращаться с синхронной скоростью, и частота вращения его будет постоянной (второй этап).

7. Потери в установившихся и переходных режимах электроприводов. Потери электроэнергии в установившемся режиме нерегулируемого и регулируемого электропривода. Потери энергии при переходных режимах нерегулируемого и регулируемого электропривода. Способы уменьшения потерь энергии в переходных режимах.
Мощность потерь в нерегулируемом электроприводе при работе его в установившемся режиме на естественной механической характеристике складывается из мощности потерь в двигателе и в механических передачах от двигателя к рабочему органу, т.е.
![]() ,
гдеK и V
– постоянные и переменные потери в
двигателе.
,
гдеK и V
– постоянные и переменные потери в
двигателе.
К постоянным потерям относятся
потери в стали, механические, а для
двигателей постоянного тока независимого
возбуждения и синхронных двигателей –
еще и потери на возбуждение. Постоянные
потери в действительности не являются
постоянными, а изменяются при изменении
скорости, напряжения и частоты сети.
Переменные потери – это потери в
обмотках, зависящие от тока нагрузки.
Для двигателей постоянного тока
 ,
для АД
,
для АД
![]() ,
здесь x – кратность
тока нагрузки. Переменные потери для
различных двигателей
,
здесь x – кратность
тока нагрузки. Переменные потери для
различных двигателей
![]() ,
а суммарные потери в двигателе
,
а суммарные потери в двигателе
![]() ,
где
,
где
![]() - коэффициент потерь. Потери мощности
и энергии в установившемся режиме
регулируемого электропривода.
- коэффициент потерь. Потери мощности
и энергии в установившемся режиме
регулируемого электропривода.
У ДПТ с независимым возбуждением без большой ошибки можно принять, что механические потери Км и потери в стали Кс равны
![]() ,
где (Км+Кс)н
– механические потери и потери в стали
при номинальной скорости. Переменные
потери в якорной цепи
,
где (Км+Кс)н
– механические потери и потери в стали
при номинальной скорости. Переменные
потери в якорной цепи
![]() ,
где 0р
- скорость идеального холостого хода
двигателя, соответствующая его
регулировочной характеристике.
,
где 0р
- скорость идеального холостого хода
двигателя, соответствующая его
регулировочной характеристике.
Суммарные
потери в регулируемом приводе с двигателем
независимого возбуждения с учетом
потерь на возбуждение Кв
![]() .
В АД к постоянным потерям относят
механические потери Км,
потери в стали статора Кс1
и ротора Кс2, в меди статора
от намагничивающего тока I,
т.е.
.
В АД к постоянным потерям относят
механические потери Км,
потери в стали статора Кс1
и ротора Кс2, в меди статора
от намагничивающего тока I,
т.е.
![]() .
.
Переменные потери в роторной цепи Vрот определяются моментом и скольжением, а в статорной цепи Vстат они зависят только от момента. Если регулирование осуществляется при Мс=const, то потери в статоре постоянны, а в роторной цепи ≡ S.
Потери энергии при переходных процессах в нерегулируемом электроприводе.
В общем случае суммарные потери энергии в переходном процессе определяются выражением
![]() ,
здесь ∆Р – суммарные потери
мощности, зависящие от нагрузки на валу,
механической и электромагнитной инерции
и ряда других факторов.
,
здесь ∆Р – суммарные потери
мощности, зависящие от нагрузки на валу,
механической и электромагнитной инерции
и ряда других факторов.
Мощность переменных потерь в
якорной цепи ДПТ и роторе АД можно
представить одним и тем же выражением
и выражение потерь энергии записать в
виде![]()
С точки зрения уменьшения пусковых потерь в статоре целесообразно применять АД с повышенным скольжением, имеющее большее r2, а также к.з. АД с глубоким пазом, т.к. последние имеют повышенное сопротивление ротора.
При торможении под нагрузкой потери энергии меньше, чем при торможении вхолостую.