

3.3. Режим обратного питания четырехполюсников
П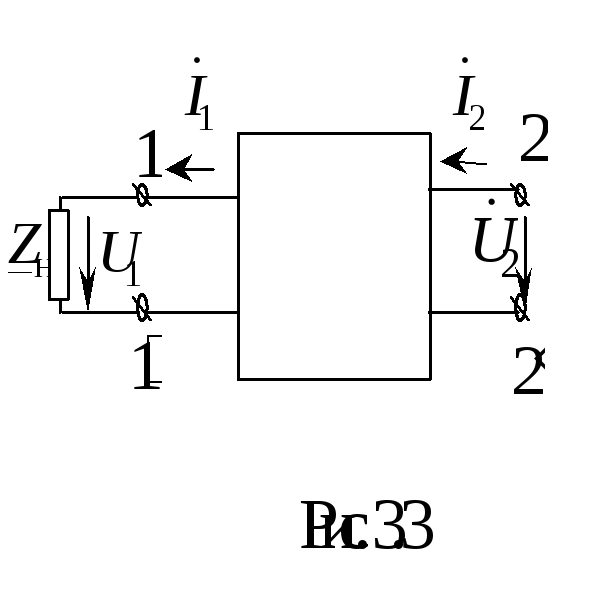 ри
выводе уравнений четырехполюсника в
предыдущем разделе мы предполагали,
что источник энергии был подключен к
выводам 1–1. Поменяем
местами полюса четырехполюсника.
Подсоединим источник к выводам 2–2,
а к выводам 1–1–
сопротивление нагрузки
ри
выводе уравнений четырехполюсника в
предыдущем разделе мы предполагали,
что источник энергии был подключен к
выводам 1–1. Поменяем
местами полюса четырехполюсника.
Подсоединим источник к выводам 2–2,
а к выводам 1–1–
сопротивление нагрузки![]() (рис. 3.3). Такое включение называютобратным.
(рис. 3.3). Такое включение называютобратным.
Запишем уравнения четырехполюсника в А – параметрах с учетом того, что направления токов в нем относительно принятого на рис. 3.2 изменится на противоположное:
![]()
Решим эту систему
относительно
![]() и
и![]() :
:
![]() ,
,
где
![]() – определительА–матрицы,
– определительА–матрицы,![]() .
.
Тогда
![]() (3.11)
(3.11)
где
![]() и
и![]() – определители, для которых в
– определители, для которых в![]() заменены соответственно первый и второй
столбец на
заменены соответственно первый и второй
столбец на![]() и
и![]() .
Уравнения (3.11) называют уравнениями
четырехполюсника при обратном питании,
а (3.9) – соответственно при прямом
питании.
.
Уравнения (3.11) называют уравнениями
четырехполюсника при обратном питании,
а (3.9) – соответственно при прямом
питании.
Замечаем, что уравнения четырехполюсника при обратном питании отличаются от уравнений прямого питания местоположением коэффициентов А11иА22. Отсюда условие симметричности четырехполюсников:А11=А22.
3.4. Определение а–параметров с помощью режимов короткого замыкания и холостого хода
Режимам холостого хода (ХХ) и короткого замыкания (КЗ) при прямом и обратном питании четырехполюсника соответствуют схемы рис. 3.4 (а, б – режимы ХХ и КЗ при прямом питании; в, г – при обратном питании).
Прямое питание
Режим холостого
хода.Принимая во внимание, что![]() ,
,![]() ,
формула (3.9) принимает вид
,
формула (3.9) принимает вид
Со стороны выводов 1–1в режиме холостого хода входное сопротивление четырехполюсника
![]() . (3.12)
. (3.12)
Режим короткого
замыкания. Учитывая, что в этом случае![]() (рис. 3.4, б), соотношение (3.9) будет иметь
вид
(рис. 3.4, б), соотношение (3.9) будет иметь
вид

В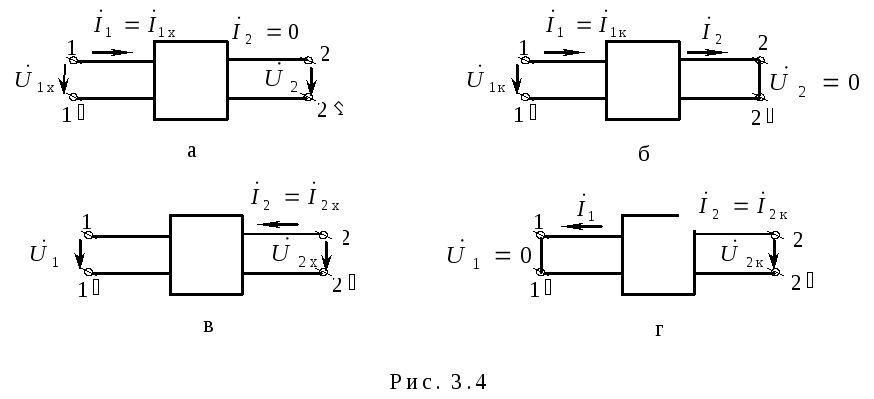 ходное
сопротивление четырехполюсника со
стороны выводов 1–1
ходное
сопротивление четырехполюсника со
стороны выводов 1–1
![]() . (3.13)
. (3.13)
Обратное питание
Учитывая, что при обратном питании А11иА22меняются местами, можно получить еще два уравнения (рис. 3.4, в, г).
Входное сопротивление со стороны выводов 2–2в режиме холостого хода
![]() . (3.14)
. (3.14)
Входное сопротивление четырехполюсника со стороны выводов 2–2в режиме короткого замыкания
![]() . (3.15)
. (3.15)
Сопротивления
![]() ,
,![]() ,
,![]() ,
,![]() называютпараметрами короткого
замыкания и холостого хода. ВыразимА–параметры через эти сопротивления.
С этой целью из (3.14) вычтем (3.13)
называютпараметрами короткого
замыкания и холостого хода. ВыразимА–параметры через эти сопротивления.
С этой целью из (3.14) вычтем (3.13)
![]() .
.
После деления
![]() ,
,
получим
![]() . (3.16)
. (3.16)
Учитывая (3.14), (3.12), (3.13), получим
![]() . (3.17)
. (3.17)
Уравнение
![]() – проверочное.
– проверочное.
3.5. Нагрузочный режим четырехполюсника как результат наложения режимов холостого хода и короткого замыкания
Пусть к выводам
2–2четырехполюсника
подключено сопротивление нагрузки![]() .
При этом
.
При этом![]() ,
,![]() и
и![]() ,
,![]() связаны соотношениями (3.9). Отсоединим
сопротивление
связаны соотношениями (3.9). Отсоединим
сопротивление![]() (режим холостого хода). Отрегулируем
входное напряжение
(режим холостого хода). Отрегулируем
входное напряжение![]() так, чтобы напряжение на выходных
разомкнутых зажимах
так, чтобы напряжение на выходных
разомкнутых зажимах![]() стало равным напряжению
стало равным напряжению![]() в нагрузочном режиме:
в нагрузочном режиме:
![]()
Замкнем выводы
2–2(![]() ,
режим короткого замыкания). Отрегулируем
входное напряжение
,
режим короткого замыкания). Отрегулируем
входное напряжение![]() так, чтобы ток на выходных зажимах
так, чтобы ток на выходных зажимах![]() стал равным току
стал равным току![]() в нагрузочном режиме. Тогда
в нагрузочном режиме. Тогда
![]()
При сложении получим
![]() .
.
Полученные
соотношения показывают, что рабочий
режим четырехполюсника (нагрузка
![]() подключена к выводам 2–2)
можно воспроизвести путем наложения
режимов холостого хода и короткого
замыкания, т.е. можно смоделировать
нагрузочный режим, в некоторых случаях
требующий источников большой мощности,
наложением крайних нагрузочных режимов
(холостого хода и короткого замыкания),
когда такие источники не нужны (нагрузка
не потребляет мощности!).
подключена к выводам 2–2)
можно воспроизвести путем наложения
режимов холостого хода и короткого
замыкания, т.е. можно смоделировать
нагрузочный режим, в некоторых случаях
требующий источников большой мощности,
наложением крайних нагрузочных режимов
(холостого хода и короткого замыкания),
когда такие источники не нужны (нагрузка
не потребляет мощности!).