

2.4.Силовой анализ механизма
Определение исходных данных силового расчета
Исходные данные :
µ=30кг/м-погонная масса , g=9.81(кг*м)/с^2-ускорение свободного падения


Рис.2.18.Исходные данные силового расчета из стандартной программы.
Массы звеньев (кг)

Силы тяжести (Н)

Моменты инерции (кг∙м2)

Координаты центров масс, их скорости и ускорения


Звено 5

Звено 4

Звено 3

Звено 2

Звено 1

Силы инерции (Н)

Ход поршня (м)
D поршня
Давление на рабочем ходу

Давление на холостом ходу

Атмосферное давление

Сила сопротивления на рабочем ходу

Сила сопротивления на холостом ходу

Сила сопротивления

График зависимости силы сопротивления от обобщенной координаты

Рис.2.19. График зависимости силы от q.
Схема механизма

Рис.2.20.Схема механизма.
Составление уравнений кинетостатики
Для каждой структурной группы механизма, начиная с последней, записываем уравнения кинетостатики, приложив необходимые реакции.
Определим реакции в кинематических парах для звена 4 и 5

Рис2.21.Звенья 3 и 5.
Звено 5

Звено 4

Определим реакции в кинематических парах в для звена 3 и 2.

Рис.2.21.Звено 2 и Звено 3(кулиса).
Звено 2

Звено 3

Определим реакции в кривошипе и движущий момент q
Рис.2.22.Звено 1.
Звено 1

Нахождение движущего момента из общего уравнения динамики
A(q)=Vxs1(q)∙Ф1x(q)+Vxs2(q)∙Ф2x(q)+Vxs3(q)∙Ф3x(q)+Vxs4(q)∙Ф4x(q)+ Vxs5(q)∙Ф5x(q)
B(q)=Vys1(q)∙(Ф1y(q)-G1)+Vys2(q)∙(Ф2y(q)-G2)+Vys3(q)∙(Ф3y(q)-G3)+Vys4(q)∙(Ф4x(q)-G4)+Vys5(q)∙(Ф5y(q)-G5)
C(q)=M1Ф(q)∙F1′(q)+M2Ф(q)∙F2′(q)+M3Ф(q)∙F3′(q)+M4Ф(q)∙F4′(q)+ M5Ф(q)∙F5′(q)
Q1(q)=-(A(q)+B(q)+C(q)+F(q)∙Ye′(q)
График зависимости Q и Q1 от q в Mathcad

Рис.2.23.График зависимости Q и Q1 от q.
Движущий момент из стандартной программы
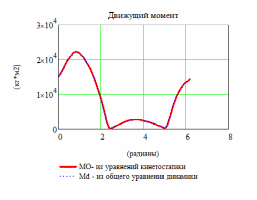
Рис.2.24.Движущий момент из стандартной программы.
Сравнение результатов расчетов
|
|
Стандарт.прог |
Mathcad |
|
Стандарт.прог. |
Mathcad |
|
RX0 |
-1.72591*10^4 |
-1.726*10^4 |
RY0 |
6.277634*10^4 |
6.378*10^4 |
|
RX1 |
-1.724528*10^4 |
-1.725*10^4 |
RY1 |
6.270571*10^4 |
6.271*10^4 |
|
RX2 |
-9.433701*10^3 |
-9.434*10^4 |
RY2 |
2.396934*10^4 |
2.397*10^4 |
|
RX3 |
-2.655646*10^4 |
-2.656*10^4 |
RY3 |
8.644371*10^4 |
8.644*10^4 |
|
RX4 |
2.647076*10^4 |
2.647*10^4 |
RY4 |
0 |
0 |
|
RX12 |
9.433701*10^3 |
9.434*10^3 |
RY12 |
-2.389871*10^4 |
-2.39*10^4 |
|
RX34 |
-2.647076*10^4 |
-2.647*10^4 |
RY34 |
8.613593*10^4 |
8.614*10^4 |
Результаты силового расчета из стандартной программы

Рис.2.25.Реакции в КП из стандартной программы
Моменты в КП
|
|
Стандартная прог. |
Mathcad |
|
Md |
1.505785*10^4 |
1.506*10^4 |
|
MO |
1.505785*10^4 |
1.506*10^4 |
|
MB |
0 |
0 |
|
MD |
1.152856*10^-11 |
0 |
|
Pc |
-8.58*10^4 |
-8.58*10^4 |
Моменты в КП из стандартной программы

Рис.2.27.Моменты в КП из стандартной программы.
Выводы
При выполнении курсовой работы, я подробно изучил методику геометрического, кинематического, силового анализа механизма. Мною были освоены принципы нахождения скоростей и ускорений механизма при помощи построения плана скоростей и ускорений для произвольного и крайнего положения. Я научился искать особые положения для структурных групп, искать движущие моменты разными способами.
Список литературы
1.Евграфов А.Н. Теория механизмов и машин.