

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ИНСТИТУТ МЕТАЛЛУРГИИ, МАШИНОСТРОЕНИЯ И ТРАНСПОРТА
КАФЕДРА ТЕОРИИ МЕХАНИЗМОВ И МАШИН
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОМУ ПРОЕКТУ
Студент гр.23304/2 _____________ ( )
Преподаватель _____________ (.)
Санкт-Петербург
2016
Механизм 2
1.1 Геометрический анализ
Задачи геометрического анализа
Целью геометрического анализа механизма является составление групповых уравнений геометрического анализа, решение их, выделение побочных и основных решений, определяющих положения звеньев, а также исследование функций положения выходных звеньев структурных групп.
Схема механизма
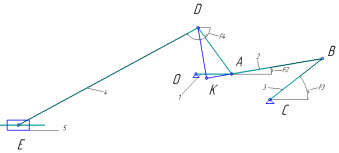
Рис.1.1. Схема механизма.
Исходные данные (м)
OA=0.14
AB=0.36
BC=0.26
XC=0.29
YC=-0.1
M1=-1
X2D=-0.1
Y2D=0.2
DE=0.8
YE=-0.2
M2=-1
Исходные данные в стандартной программе
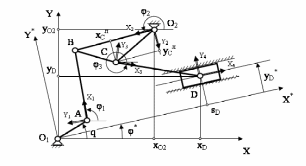
Рис.1.2.Схема механизма из стандартной программы.
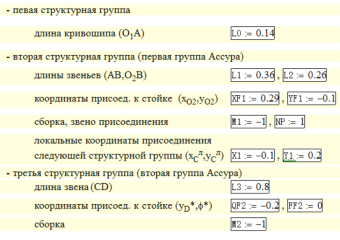
Рис.1.3.Исходные данные в стандартной программе.
Структурный анализ механизма
Структурный анализ механизма называется разделение механизма на отдельные структурные группы. Благодаря чему упрощается геометрическое, кинематическое и динамическое исследование механизма.
Целью структурного анализа механизма является определение количества звеньев и кинематических пар, определение подвижности пар и степени подвижности механизма, а также выделение в нем структурных групп – кинематических цепей, у которых число входов совпадает с числом степеней подвижности.
Граф механизма

Рис.1.4.Структурный граф механизма.
Число подвижных звеньев механизма N=5.
Число низших кинематических пар pн = 7;
Число высших кинематических пар pв = 0;
Степень подвижности механизма:
Механизм нормальный, т.к. q = W
Составление уравнений геометрического анализа
Геометрический анализ включает построение плана механизма в зависимости от входной координаты (q), составление групповых уравнений и их решения в общем виде. С целью проверки правильности расчетов проведено численное решение этих уравнений для одного значения (q = 0 градусов).
Групповыми уравнениями определяются координаты характеристических точек при различных положениях частей механизма в зависимости от входной координаты. Для расчетного механизма групповые уравнения имеют вид
Первая система
Вторая система
Третья система
Четвертая система
Пятая система
Решение уравнений геометрического анализа
Первая система
Перенесем неизвестные в левую часть уравнения, а известные в правую и возведем все в квадрат и сложим.
(AB∙cosF2(q)-CB∙cosF3(q))2+(AB∙sinF2(q)-CB∙sinF3(q))2=(XC-Xa(q))2+(YC-Ya(q))2
Выполним замену переменной
F23(q)=F2(q)-F3(q)
F2(q)=F23(q)+F3(q)
cosF23(q)=
sinF23=
Теперь подставим значение F2(q) в систему
Выполним замену переменных для решения системы по формуле Крамера
A1(q)=ABcosF23(q)-BC
B1(q)=-ABsinF23(q)
C1(q)=XC-Xa(q)
A2(q)=ABsinF23(q)
B2(q)=ABcosF23(q)-BC
C2(q)=YC-Ya(q)
Решая систему, получим
cosF3(q)= sinF3(q)=
Найдем cosF2(q) и sinF2(q)
cosF2(q)=cosF23(q)∙cosF3(q)-sinF23(q)∙sinF3(q)
sinF2(q)=cosF23(q)∙sinF3(q)+sinF23(q)∙cosF3(q)
Особое положение группы ВВВ
Запишем координаты точек Xa и Ya в виде:
Перепишем первую систему
Для составления матрицы Якоби возьмем частные производные по F2(q) и F3(q)
Определитель Якоби
AB∙sinF2(q)∙BC∙cosF3(q)-AB∙cosF2(q)∙BC∙cosF3(q)=0
F3(q)=F2(q) – особое положение группы ВВВ (Три шарнира находятся на одной прямой).