

Экзамен / тмм - экзамен(и задачи) / ТММ Экзамен! / Лекции / шпоры динамика / 12
.doc7.3. Внешняя виброактивность механизма и машины
При
движении механизмов возникают переменные
силы, действующие на корпус машины.
Такие силы возникают прежде всего в
кинематических парах, соединяющих
подвижные звенья механизма с корпусом.
Так, например, механизм, показанный на
рис.7.1, воздействует на корпус силами
![]() ,
возникающими в шарнирах 0, 01,
02, 03. Равные и
противоположно направленные силы
,
возникающими в шарнирах 0, 01,
02, 03. Равные и
противоположно направленные силы
![]() приложены к звеньям механизма со стороны
корпуса; в дальнейшем мы будем их называть
внешними реакциями и обозначать
через
приложены к звеньям механизма со стороны
корпуса; в дальнейшем мы будем их называть
внешними реакциями и обозначать
через
![]() ,
где k – номер звена,
к которому приложена соответствующая
сила.
,
где k – номер звена,
к которому приложена соответствующая
сила.
Переменные силы, действующие на корпус машины, могут вызывать ряд явлений вибрационного характера (колебания корпуса как твердого тела относительно фундамента вследствие упругости опор, упругие колебания корпуса, вибрация здания, в котором установлена машина, и т.п.); в связи с этим способность механизма возбуждать переменные силы, действующие на корпус, называется его внешней виброактивностью. Снижение внешней виброактивности отдельных механизмов и машин в целом является одной из наиболее актуальных задач современного машиностроения, поскольку вибрации приводят зачастую к резкому снижению качества работы машин, их прочности, надежности и долговечности. Снижение внешней виброактивности машин стало в последнее время и важнейшей социальной задачей. Вибрации машин, воздействуя на людей, работающих на этих машинах, приводят к нарушению их трудоспособности, а при длительном воздействии оказываются опасными для здоровья человека.
Уравновешивание механизмов и машины. Одним из методов уменьшения виброактивности машин является уравновешивание механизмов. Механизм называется уравновешенным, если его переменные во времени внешние реакции при любом законе движения образуют в каждый момент времени уравновешенную систему сил1 . Рассмотрим некоторый механизм, имеющий N подвижных звеньев, законы движения которых являются заданными. Составим для каждого из этих звеньев уравнения кинетостатики
 (7.10)
(7.10)
Здесь
![]() –
сумма внешних активных сил, приложенных
к k-му звену;
–
сумма внешних активных сил, приложенных
к k-му звену;
![]() –
сумма внутренних активных сил, т.е. сил
взаимодействия между звеньями;
–
сумма внутренних активных сил, т.е. сил
взаимодействия между звеньями;
![]() – главный вектор сил инерции звена;
– главный вектор сил инерции звена;
![]() – сумма сил, воздействующих на звено
со стороны стойки;
– сумма сил, воздействующих на звено
со стороны стойки;
![]() – сумма внутренних реакций связи, т.е.
сумма сил, действующих на k-е
звено со стороны других подвижных
звеньев;
– сумма внутренних реакций связи, т.е.
сумма сил, действующих на k-е
звено со стороны других подвижных
звеньев;
![]() – главные моменты соответствующих сил
относительно некоторого центра 0.
Сложим уравнения (7.10), соответствующие
всем k от 1 до
N. В соответствии с
третьим законом Ньютона
– главные моменты соответствующих сил
относительно некоторого центра 0.
Сложим уравнения (7.10), соответствующие
всем k от 1 до
N. В соответствии с
третьим законом Ньютона
 (7.11)
(7.11)
поскольку силы взаимодействия каждой пары подвижных звеньев равны по величине и противоположны по направлению. Таким образом получаем
![]() (7.12)
(7.12)
где
![]() – главные векторы, а
– главные векторы, а
![]() – главные моменты. Для уравновешенности
механизма в соответствии с принятым
определением необходимо и достаточно
выполнение условий
– главные моменты. Для уравновешенности
механизма в соответствии с принятым
определением необходимо и достаточно
выполнение условий
![]() (7.13)
(7.13)
Из (7.12) следует, что для этого должны выполняться условия
![]() (7.14)
(7.14)
т.е. внешние активные силы и силы инерции звеньев механизма должны в совокупности составлять уравновешенную систему сил.
Внешние
реакции механизмов, действующие на
корпус машины, передаются и на основание,
на котором эта машина установлена.
Поэтому внешняя виброактивность машины
обусловливается внешней виброактивностью
ее механизмов. Однако, формулируя условия
уравновешенности машины, следует иметь
в виду, что во многих случаях активные
силы, приложенные к звеньям механизма,
оказываются по отношению к машине в
целом силами внутренними. Так, например,
к входному звену механизма, показанного
на рис.7.1, приложена обобщенная движущая
сила Q; равная и
противоположная ей сила –Q
действует, в соответствии с третьим
законом Ньютона, на статор двигателя
и, если двигатель установлен на корпусе
машины, – на этот корпус. На корпус будет
действовать момент –MС,
равный и противоположный моменту сил
сопротивления, если источник этих сил
связан с корпусом машины. Внутренней
по отношению к машине в целом окажется
и упругая сила пружины
![]() ,
показанная на рис.7.2, поскольку
противоположная ей сила
,
показанная на рис.7.2, поскольку
противоположная ей сила
![]() приложена к корпусу. Внутренними являются
силы давления газов, возникающие в
компрессоре или в двигателе внутреннего
сгорания (рис.7.4): сила
приложена к корпусу. Внутренними являются
силы давления газов, возникающие в
компрессоре или в двигателе внутреннего
сгорания (рис.7.4): сила
![]() приложена к поршню, а сила
приложена к поршню, а сила
![]() передается на корпус через цилиндр, к
стенке которого она приложена.
передается на корпус через цилиндр, к
стенке которого она приложена.
Е сли
все внешние активные силы, приложенные
к звеньям механизма, являются внутренними
для машины в целом, уравновешенность
машины будет обеспечиваться при
выполнении условий
сли
все внешние активные силы, приложенные
к звеньям механизма, являются внутренними
для машины в целом, уравновешенность
машины будет обеспечиваться при
выполнении условий
![]() (7.15)
(7.15)
т.е. при уравновешенности сил инерции.
За меру
неуравновешенности механизма, его
внешней виброактивности естественно
принять величины главного вектора
![]() и главного момента
и главного момента
![]() его внешних реакций. Следует, однако,
иметь в виду, что при
его внешних реакций. Следует, однако,
иметь в виду, что при
![]() величина
величина
![]() зависит от выбора центра приведения 0.
Поэтому
зависит от выбора центра приведения 0.
Поэтому
![]() может рассматриваться как мера
неуравновешенности только при
фиксированном положении точки 0.
Вообще же не зависящим от центра
приведения является, как известно,
скалярное произведение
может рассматриваться как мера
неуравновешенности только при
фиксированном положении точки 0.
Вообще же не зависящим от центра
приведения является, как известно,
скалярное произведение
![]() .
.
В
современных быстроходных машинах
уравновешивание механизмов и машины в
целом не решает полностью задачу
устранения внешней виброактивности.
Уравновешенные силы, приложенные к
корпусу в различных точках, могут
вызывать его деформации и приводить к
интенсивным колебаниям. Не следует
также думать, что внутренние активные
силы, не входящие в условие (7.15), вообще
не влияют на уровень внешней виброактивности.
Следует помнить, что эти силы влияют на
закон движения механизма, а следовательно,
и на величины сил инерции. Так, например,
внутренние силы
![]() и
и
![]() ,
показанные на рис.7.4, могут вызвать
неравномерность вращения кривошипа
ОА, что, вообще говоря, приведет к
изменению воздействия машины на
основание.
,
показанные на рис.7.4, могут вызвать
неравномерность вращения кривошипа
ОА, что, вообще говоря, приведет к
изменению воздействия машины на
основание.
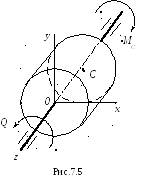
7.4. Внешняя виброактивность вращающегося ротора
и роторной машины
Существует множество машин, в которых единственным подвижным звеном является ротор, совершающий вращательное движение. К ним относятся роторные электродвигатели, насосы, центробежные компрессоры, турбины, центрифуги. Исследуем внешнюю виброактивность ротора (рис.7.5), рассматриваемого как абсолютно твердое тело. Пусть к ротору приложены движущий момент Q и момент сил сопротивления МС; ротор вращается с угловой скоростью и угловым ускорением . Введем систему координат 0хyz, связанную с
ротором.
Проецируя уравнения (7.12) на эти оси,
учитывая, что в рассматриваемом случае
![]() = 0,
= 0,
![]()
![]()
![]() и используя выражения (4.20) и (4.21), находим
и используя выражения (4.20) и (4.21), находим
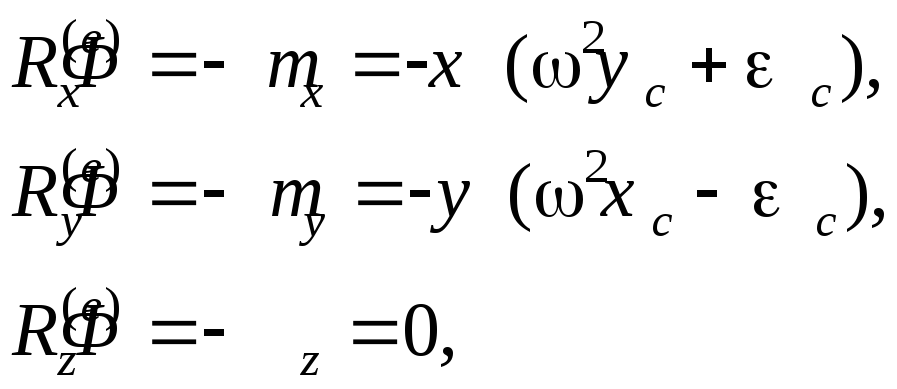 (7.16)
(7.16)
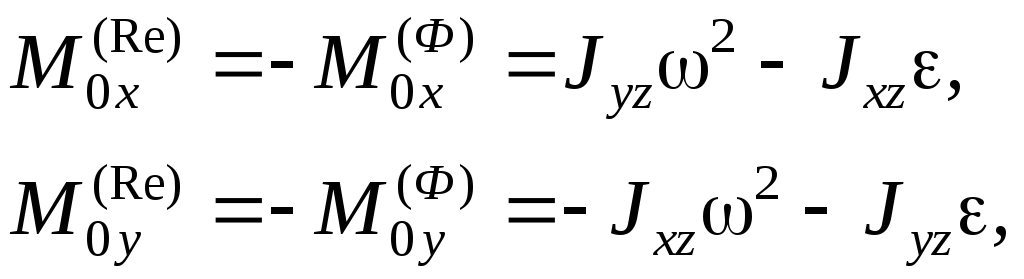 (7.17)
(7.17)
![]() (7.18)
(7.18)
Здесь
хс и yc
– координаты центра масс ротора с.
В выражения 7.16 не вошла сила тяжести
ротора: она создает постоянные по
величине реакции в опорах, которые могут
быть определены из уравнений статики
и добавлены к динамическим реакциям1
. Из соотношений (7.16) следует, что первое
условие уравновешенности
![]() =
0 будет выполнено при любых
и в том и только
том случае, если
=
0 будет выполнено при любых
и в том и только
том случае, если
xc = yc = 0 , (7.19)
т.е. если центр масс ротора лежит на оси вращения. При выполнении этого условия ротор называется статически уравновешенным. Из выражений (7.17) вытекает, что жесткий ротор не создает динамических моментов относительно осей 0х и 0y при любых и в том и только том случае, если
Jxz = Jyz = 0, (7.20)
т.е. если ось z является главной осью инерции ротора. При выполнении условий (7.19) и (7.20), т.е. если ось вращения является главной центральной осью инерции, ротор называется динамически уравновешенным.
Сравнивая
(7.18) с уравнением движения вращающегося
ротора
![]() легко заметить, что при любом законе
движения
легко заметить, что при любом законе
движения
![]() :
реакции в опорах вращающегося ротора
не могут создавать момент относительно
оси вращения. Этот вывод получен в
предположении, что силы трения, возникающие
в опорах ротора, отнесены к активным
силам.
:
реакции в опорах вращающегося ротора
не могут создавать момент относительно
оси вращения. Этот вывод получен в
предположении, что силы трения, возникающие
в опорах ротора, отнесены к активным
силам.
Предположим теперь, что как движущий момент, так и силы сопротивления, создающие момент МC, являются для машины в целом внутренними силами. (К внутренним силам относятся, в частности, и силы трения в опорах.) В таком случае, рассматривая виброактивность роторной машины, нужно исключить из выражения (7.18) активные силы; в результате получаем:
![]()
![]() (7.21)
(7.21)
Таким образом, воздействие на основание роторной машины с динамически уравновешенным ротором и внутренними активными силами сводится к моменту (7.21). При равномерном вращении ротора воздействие равно нулю; момент относительно оси вращения возникает при разбеге и выбеге машины, а также при неравномерном вращении ротора. Ниже будет показано, что неравномерное вращение ротора двигателя возникает, в частности, при установившемся движении цикловой машины: оно вызывается внутренней виброактивностью механической системы. При этом воздействие машины на основание носит колебательный характер и может вызывать весьма существенные вибрации фундамента машины издания, в котором она установлена.
Р ассмотрим
характерный пример, иллюстрирующий
сказанное выше. На рис.7.6 приведена схема
вырубного пресса. Пуансон 1 приводится
в движение от двигателя 2, установленного
на корпусе, через двухступенчатую
зубчатую передачу и рычажный механизм.
В момент вырубки детали из заготовки 3
происходит удар, возникают весьма
большие силы
ассмотрим
характерный пример, иллюстрирующий
сказанное выше. На рис.7.6 приведена схема
вырубного пресса. Пуансон 1 приводится
в движение от двигателя 2, установленного
на корпусе, через двухступенчатую
зубчатую передачу и рычажный механизм.
В момент вырубки детали из заготовки 3
происходит удар, возникают весьма
большие силы
![]() и
и
![]() ,
действующие на пуансон и на матрицу 4.
Эти силы являются для машины в целом
внутренними силами, поэтому на основание
они не действуют. Однако в момент удара
происходит резкое уменьшение скорости
пуансона, а вследствие этого и всех
звеньев жесткого механизма, включая
ротор двигателя, обычно обладающий
большим моментом инерции J.
Возникает переменный инерционный момент
J,
воздействующий на основание пресса.
Частота этого воздействия определяется
числом циклов машины в единицу времени.
,
действующие на пуансон и на матрицу 4.
Эти силы являются для машины в целом
внутренними силами, поэтому на основание
они не действуют. Однако в момент удара
происходит резкое уменьшение скорости
пуансона, а вследствие этого и всех
звеньев жесткого механизма, включая
ротор двигателя, обычно обладающий
большим моментом инерции J.
Возникает переменный инерционный момент
J,
воздействующий на основание пресса.
Частота этого воздействия определяется
числом циклов машины в единицу времени.
На рис.
7.7, а показана схема двухроторной
машины. Если оба ротора динамически
уравновешены, а моменты Q
и MС являются внутренними
для машины обобщенными силами, то
воздействие машины на основание (внешняя
виброактивность) сводится к моменту
![]() где i – передаточное
отношение передачи, связывающей оба
ротора. При
где i – передаточное
отношение передачи, связывающей оба
ротора. При
![]() машина
является полностью уравновешенной. Еще
раз подчеркнем, что уравновешенность
нарушается, если хотя бы одна из активных
обобщенных сил становится внешней. Так,
например, если ротор 2 на рис.7.7, а
является ротором вентилятора, а момент
MС создается
аэродинамическими силами, на корпус
машины б
машина
является полностью уравновешенной. Еще
раз подчеркнем, что уравновешенность
нарушается, если хотя бы одна из активных
обобщенных сил становится внешней. Так,
например, если ротор 2 на рис.7.7, а
является ротором вентилятора, а момент
MС создается
аэродинамическими силами, на корпус
машины б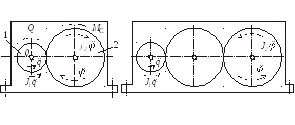 удет
действовать момент МС. В
двухроторной машине, схема которой
показана на рис.7.7, б, оба ротора
вращаются в одном направлении; поэтому
инерционные моменты
удет
действовать момент МС. В
двухроторной машине, схема которой
показана на рис.7.7, б, оба ротора
вращаются в одном направлении; поэтому
инерционные моменты
![]() и
и
![]() в
этом случае складываются, и при ускоренном
движении уравновешенность не может
быть достигнута.
в
этом случае складываются, и при ускоренном
движении уравновешенность не может
быть достигнута.
1 Уравновешенный механизм может воздействовать на стойку постоянными силами. Такие постоянные во времени реакции могут вызываться, например, силами тяжести звеньев.
1 Момент силы тяжести относительно оси х является постоянным; момент относительно оси z может считаться включенным в момент сил сопротивления МC, входящий в уравнение (7.18).