

Экзамен / TMM_otvety_1
.pdfБилет № 19. Коробка передач. Коробка скоростей. Коробка подач. Пример: четырёхскоростная коробка передач.
1. Коробки передач.
Рис. 3.30
а) два фиксированных значения передаточного отношения:
(iI-II)1 = z2 / z1, (iI-II)2 = z4 / z3.
б) пять значений передаточного отношения:
i |
|
|
|
z13 |
|
z6 |
, |
i |
|
|
|
z13 |
|
z4 |
, |
i |
|
|
|
z12 |
|
z6 |
, i |
|
|
|
z12 |
|
z4 |
, |
|||||
|
2 |
|
|
3 |
|
|
4 |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
1 |
|
z1 |
|
z10 |
|
|
|
|
z1 |
|
z11 |
|
|
|
z3 |
|
z10 |
|
|
|
z3 |
|
z11 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
i |
|
|
|
z13 |
|
z8 |
|
z7 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
ð |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
z1 z9 |
|
z8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Билет № 20. Вариаторы цепные и ременные. Вариаторы торовые.
1.Вариаторы. Плавное изменение передаточного отношения. осуществляют с помощью передачи, называемой вариатором.
Для примера рассмотрим вариаторы CVT (Continuously Variable Transmission), применяемые в автомобилестроении.
Б и в
Рис. 3.32
Рис. 3.31
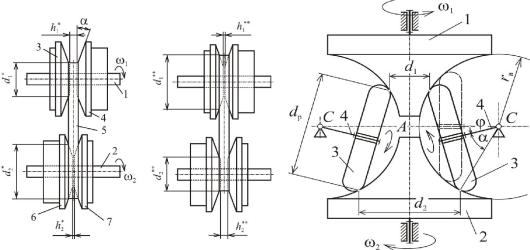
В торовом вариаторе Toroidal CVT вместо гибкого звена используются ролики.
Передаточное отношение вариатора i12:
i |
ω1 |
|
d2 |
( ) |
|
AC rв cos(α ) |
i |
( ) |
12 |
ω2 |
|
d1 |
( ) |
AC rв cos(α ) |
12 |
|
|
|
|
|
|
|||||
где rв – радиус огибающей профилей звеньев 1 и 2; φ – угол отклонения звена 4 от нейтрального положения; α – параметр вариатора: sin α = rр / rв ; rр = dр / 2 – радиус ролика 3.
В нейтральном положении φ = 0, d1 = d2, i12 = 1, ω1 = ω2.
При φ > 0 (как на рис. 3.32) d1 < d2, i12 > 1, ω1 > ω2 (понижающая передача).
При φ < 0 d1 > d2, i12 < 1, ω1 < ω2 (повышающая передача).
К недостаткам вариаторов относят ограничение по передаваемой мощности, из-за чего их не используют в грузовых автомобилях.

Билет № 21. Кинематика планетарных механизмов. Примеры.
Планетарными механизмами называют зубчатые механизмы с подвижными осями колес.
z1, z3 – центральные или солнечные колеса,
z2 – сателлит (или планетное колесо),
H – водило.
Число степеней подвижности механизма (формулу Чебышева):
Wï ë 3 4 2 4 1 2 2 ,
N=4 – число подвижных звеньев,
рн=4 – число низших кинематических пар,
рв=2 – число высших кинематических пар.
Планетарные механизмы с неподвижным зубчатым колесом называют
эпициклическими.
В планетарных механизмах уже нельзя использовать формулы, полученные для определения передаточного отношения ряда зубчатых колес, т.е.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
ω1 |
|
|
z2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
ω2 |
|
|
z1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Определение передаточного отношения. |
|||||||
|
z3 |
|
|
|
|
|
|
|
|
H |
Методом обращения |
движения: |
всем |
||||||||||
|
z2 |
|
|
|
|
|
|
|
|
|
звеньям |
|
механизма, |
включая |
стойку, |
||||||||
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сообщается |
угловая скорость, равная угловой |
||||||
|
z1 |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
скорости водила н и направленная в |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
противоположную сторону. |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В таком обращенном механизме водило |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
оказывается неподвижным. |
|
|
|||||
Рис. 3.33 |
i(H ) |
1 |
H |
|
|
||
|
13 |
3 |
H |
|
|
|
|
z2 |
|
z3 |
|
||
|
|
|
|
|
|
|
. |
z |
z |
|
|||||
|
1 |
|
|
2 |
|
||
(3.59)

z |
z3 |
2 |
|
z1 |
|
|
z4 |
|
H |
|
Рис. 3.34 |
Здесь i13(H ) – передаточное отношение от первого колеса к третьему при неподвижном водиле Н, т.е. в системе координат, связанной с водилом.
z2 – знак «минус» при внешнем зацеплении, z1
z3 – знак «плюс» при внутреннем зацеплении z2
Пример. Редуктор Давида.
Колесо с числом зубьев z4 неподвижное.
Числа зубьев: z1=z3=100, z2=101, z4=99.
Передаточное отношение от водила Н к колесу:
|
|
|
|
i(H ) |
|
|
|
|
|
H |
|
|
|
|
|
|
z |
2 |
|
|
|
|
z |
4 |
|
|
9999 |
|
|||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
||||||||||
|
|
|
|
|
|
|
|
|
|
z |
z |
|
1000 |
||||||||||||||||||||||||
|
|
|
|
14 |
|
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
||||
Учитывая, |
что 4 = 0, |
|
найдем отношение |
i |
(4) |
(т.е. при неподвижном |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H1 |
|
|
|
|
|
||
четвертом колесе): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
i(H ) |
1 |
1 |
|
|
z2 |
|
|
|
z4 |
|
9999 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
z |
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
14 |
|
H |
|
|
|
|
|
|
|
|
|
1000 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
1 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
i(4) |
|
H |
|
|
|
|
|
|
z1z3 |
|
|
|
|
|
|
|
|
10000 |
|
|
|
10000 , |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
H1 |
|
|
1 |
|
|
|
z1z3 z2 z4 |
|
|
|
10000 9999 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
т.е. для того, чтобы первое колесо сделало один оборот, надо повернуть водило 10 000 раз. Обычно передаточное отношение в планетарных механизмах не превышает 150.
Хотя на кинематических схемах обычно изображают один сателлит, в реальных конструкциях их устанавливают несколько. Это делается для уменьшения нагрузки на колеса и для уравновешивания центробежных сил инерции. При этом следует следить за тем, чтобы один сателлит не накладывался на другой, т.е. чтобы выполнялось условие соседства: расстояние между осями двух соседних сателлитов (рис.3.32) должно быть больше диаметра окружности их вершин:

A1 A2 2 ra2 ,
где ra2 – радиус окружности вершин сателлита. Пусть k – число сателлитов.
В равнобедренном треугольнике 0А1А2 :
A1 A2 2 (rw1 rw2 )sin ,
k
где rw1,rw2 – радиусы начальных окружности соответственно центрального колеса и сателлита. Тогда условие соседства можно записать в виде:
|
|
|
ra2 |
|
|
sin |
|
|
|
|
. |
|
rw1 rw2 |
||||
k |
|
|
|||
В частном случае при использовании несмещенных колес (о них пойдет
речь ниже) |
ra2 |
|
z2 2 |
, где |
z , z |
2 |
– числа зубьев центрального |
|
|
||||||
|
rw1 rw2 |
|
z1 z2 |
1 |
|
||
|
|
|
|
|
|||
колеса и сателлита. Для несмещенных колес условие соседства записывают в виде:
|
|
|
z |
2 |
2 |
|
|
sin |
|
|
|
|
|
. |
|
|
z1 z2 |
||||||
k |
|
|
|||||
Сателлиты размещают равномерно, т.е. соблюдением углового шага
2 . Поскольку каждое вновь устанавливаемое колесо должно входить в k
зацепление с уже установленными колесами, то должно выполняться еще одно соотношение между числами зубьев колес и числом сателлитов, так называемое условие сборки (условие монтажа). Приведем его без вывода для несмещенных колес:
|
z z |
3 |
|
2 /k |
k |
1 |
, |
|
|
|
|
|
n
где k – число сателлитов, z1 – число |
A1 |
B |
A2 |
|
||||
зубьев |
центрального |
колеса |
с |
rW2 |
||||
|
|
|
||||||
внешним зубчатым венцом, z3 – |
|
|
|
|
||||
число зубьев колеса с внутренним |
|
|
|
|
||||
зубчатым венцом, n – целое число. |
rW3 |
|
rW1 |
|
||||
|
|
|
|
|
|
|||
Пример. Коробока передач.
Рис.3.32

1-я передача. М1 и Т1 выключены,
М2 и Т2 – включены: ω1 = ω3, ωH2 = 0.
i |
|
I |
|
3 |
1 |
z8 |
|
z6 |
|
z8 |
. |
||
|
|
z |
|
|
|||||||||
I-II 1 |
|
|
II |
|
|
|
z |
7 |
|
z |
|||
|
|
|
6 |
3 |
|
|
3 |
|
|||||
2-я передача. М1 и Т2 выключены,
М2 и Т1 – включены: ω1 = ω3, ω2 = ω7 = ω8.
i |
2 |
|
I |
|
3 |
1 |
z8 |
< (iI-II)1. |
|
|
|
||||||
I-II |
|
II |
|
H1 |
|
z3 |
||
|
|
|
|
|
||||
3-я передача (прямая). М1 и М2 включены, Т1 и Т2 – выключены: ω1 = ω3 = ω2. Тогда ω1 = ωH1 = ωH2,
i |
3 |
|
I |
|
3 |
1. |
|
|
|||||
I-II |
|
II |
|
H1 |
|
|
|
|
|
|
|
4-я передача (задний ход). М1 и Т2 включены, М2 и Т1 – выключены:ω1= ω2,ωH2 = 0.
i |
р |
|
I |
|
7 |
|
z6 |
< – 1. |
|
|
|
||||||
I-II |
|
II |
|
6 |
|
z7 |
|
|
|
|
|
|
|
|
В нейтральной передаче муфты М1 и М2 выключены.

Билет №22. Кинематика планетарной коробки передач.
Пример. Коробока передач.
1-я передача. М1 и Т1 выключены,
М2 и Т2 – включены: ω1 = ω3, ωH2 = 0.
i |
|
I |
|
3 |
1 |
z8 |
|
z6 |
|
z8 |
. |
||
|
|
z |
|
|
|||||||||
I-II 1 |
|
|
II |
|
|
|
z |
7 |
|
z |
|||
|
|
|
6 |
3 |
|
|
3 |
|
|||||
2-я передача. М1 и Т2 выключены,
М2 и Т1 – включены: ω1 = ω3, ω2 = ω7 =
ω8.
i |
2 |
|
I |
|
3 |
1 |
z8 |
< (iI-II)1. |
|
|
|
||||||
I-II |
|
II |
|
H1 |
|
z3 |
||
|
|
|
|
|
||||
3-я передача (прямая). М1 и М2 включены, Т1 и Т2 – выключены: ω1 = ω3 = ω2. Тогда ω1 = ωH1 = ωH2,
i |
3 |
|
I |
|
3 |
1. |
|
|
|||||
I-II |
|
II |
|
H1 |
|
|
|
|
|
|
|
4-я передача (задний ход). М1 и Т2 включены, М2 и Т1 – выключены:ω1= ω2,ωH2 = 0.
i |
р |
|
I |
|
7 |
|
z6 |
< – 1. |
|
|
|
||||||
I-II |
|
II |
|
6 |
|
z7 |
|
|
|
|
|
|
|
|
В нейтральной передаче муфты М1 и М2 выключены.

Билет №23. Кинематика волновой передачи.
В последние годы появились механизмы, действие которых основано на деформации одного или нескольких звеньев. К таким механизмам относится волновая передача, предназначенная для передачи вращения через герметичную стенку, разделяющую пространства А и В (рис.3.35, а). Такая передача была придумана для космических спутников («космические технологии»). Все звенья передачи – жесткие, кроме колеса с числом зубьев z1, которое называется гибким колесом. Конструктивно гибкое колесо выполнено в виде тонкостенного стакана, герметично соединенного со стенкой, разделяющей пространства А и В. Звено Н называется генератором волн. На генераторе Н закреплены ролики, которые прижимают гибкое колесо к жесткому колесу с числом зубьев z2. При вращении генератора Н гибкое колесо, деформируясь под действием роликов, принимает форму овала и вызывает перемещение зубьев как гибкого колеса, так и жесткого колеса.
Таким образом, жесткое колесо, находясь в пространстве А, получает вращение от зубьев гибкого колеса, расположенных на внешней стенке стакана, в то время как генератор Н, вызывающий это движение зубьев, вращается внутри стакана. Передача называется волновой потому, что гибкое звено в целом остается неподвижным, но при вращении генератора по нему перемещается волна деформации, вызывающая небольшие перемещения зубьев.
Термины «гибкое звено», «тонкостенный стакан» не должны вводить в
заблуждение: необязательно гибкое звено представляет собой нечто хлипкое и пластмассовое. Так, например, в волновом редукторе, выпускаемом
новокраматорским |
машиностроительным |
заводом, гибкое |
колесо |
а) |
б) |
изготавливается из |
стали и |
|
|
имеет толщину 15 35 мм. |
|
В |
А |
1 |
H
q |
|
|
||
|
|
|||
z2 |
|
z1 |
||
|
||||
|
||||
|
|
|
|
|
|
|
|
|
|
Рис.3.35
2 |
Иногда |
удобнее |
|
оказывается |
делать |
|
неподвижным |
жесткое |
|
колесо, а гибкое колесо – |
|
|
подвижным |
выходным |
|
звеном (рис.3.35, б). |
|
|
Рассмотрим |
кинематику |
|
волновой передачи. |
|
Воспользуемся формулой Виллиса (3.61), учитывая, что у цилиндрических колес внутреннего зацепления направление вращения ведущего и ведомого колес совпадает:
i(H ) |
1 H |
|
z2 |
. |
|
|
|
||||
12 |
2 |
H |
|
z1 |
|
|
|
||||
При неподвижном гибком колесе z1 ( 1 = 0) получим:
|
|
|
|
|
z2 |
|||
H |
i(1) |
|
|
|
z1 |
|
. |
|
|
H 2 |
|
|
z2 |
1 |
|||
|
|
|
||||||
2 |
|
|
|
|
|
|||
|
|
|
z1 |
|||||
|
|
|
|
|
|
|
||
Пусть z1 = 200, z2 = 202; подставляя в (3.67), получим:
|
|
|
|
202 |
|
|
|
202 200 |
|
|
i(1) |
|
|
200 |
|
|
|
101. |
|||
|
|
|
|
|
||||||
H 2 |
|
|
202 |
1 |
|
200(202 200) |
|
|||
|
|
|
|
|
||||||
|
|
|
200 |
|
|
|||||
|
|
|
|
|
|
|
|
|
||
(3.66)
(3.67)
Таким образом, с помощью компактной волновой одноступенчатой передачи, имеющей всего два зубчатых колеса, можно получить такое же передаточное отношение, как и в трехступенчатом цилиндрическом редукторе, имеющем 6 зубчатых колес.

Билет № 24. Конические передачи. Автомобильный дифференциал. |
|||||||||||||||
Если rw2 , то начальная окружность превращается в начальную |
|||||||||||||||
прямую, а зубчатое колесо – в зубчатую рейку. В этом случае получают |
|||||||||||||||
зубчато-реечную передачу (рис.3.23, в). Поскольку в полюсе зацепления |
|||||||||||||||
относительная скорость равна 0, то VP1=VP2, |
и |
|
|
|
|
||||||||||
|
|
|
|
|
|
i |
|
|
1 . |
|
|
|
|
(3.49) |
|
|
|
|
|
|
|
q |
|
|
|
|
|||||
|
|
|
|
|
|
12 |
|
V |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Зубчатые колеса используют также и для передачи вращения между |
|||||||||||||||
валами с пересекающимися осями (I и II на рис.3.24) – это конические колеса. |
|||||||||||||||
Чаще всего угол между осями = 900 (такие |
|
q |
|
|
|
||||||||||
передачи |
называют |
ортогональными), |
но |
|
|
|
|||||||||
|
|
|
O |
|
|||||||||||
возможны |
и |
другие |
углы. |
В передачах |
с |
|
|
|
|
||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
коническими |
колесами |
|
существует |
I |
rW1 |
|
|
|
|||||||
мгновенная ось вращения в относительном |
|
|
rW2 |
|
|
||||||||||
|
P |
|
|
||||||||||||
движении (OP) – геометрическое место |
|
|
II |
||||||||||||
|
|
|
|||||||||||||
точек |
тел, |
имеющих |
в |
данный |
момент |
|
|
|
Рис.3.24 |
|
|||||
нулевую относительную скорость. Если |
|
|
|
|
|||||||||||
|
|
|
|
|
|||||||||||
мгновенную ось ОР, наклоненную к оси вращения I под углом 1, вращать |
|||||||||||||||
вокруг |
оси |
I, получится |
коническая |
поверхность |
– подвижная |
аксоида |
|||||||||
(поверхность, образованная мгновенной осью в локальной системе |
|||||||||||||||
координат, связанной со звеном 1 или 2, называют подвижной аксоидой). |
|||||||||||||||
Аналогично при вращении мгновенной оси ОР вокруг оси II получим |
|||||||||||||||
коническую поверхность с половиной угла при вершине, равной 2 (вторая |
|||||||||||||||
подвижная аксоида). Подвижные аксоиды в теории зубчатых зацеплений |
|||||||||||||||
называются начальными конусами. Зубья колес располагают вблизи |
|||||||||||||||
начальных конусов, а поверхности вершин и впадин имеют коническую |
|||||||||||||||
форму. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Поскольку подвижные аксоиды катятся друг по другу без скольжения, то |
|||||||||||||||
|
|
(3.50) |
rw1 q rw2 |
. |
Отсюда передаточное отношение i12:
i |
|
q |
|
rw2 |
|
z2 |
. |
(3.51) |
|
|
|
||||||
12 |
|
|
rw1 |
|
z1 |
|
||
|
|
|
|
|
|
|||
Поскольку rw1 = OPsin 1, rw2 = OPsin 2 , то