

Экзамен / TMM_otvety_1
.pdfБилет№6. Плоские механизмы и плоские группы Ассура. Формула Чебышева. Класс и порядок группы.
4. Плоские механизмы и плоские группы Ассура
Плоский механизм – такой, в котором звенья перемещаются в параллельных плоскостях. Эта модель используется достаточно часто. Для таких моделей для определения числа степеней подвижности удобно пользоваться формулой Чебышева:
Wп = 3(N – 1) – 2pн – рв . |
(1.3) |
Здесь N – число звеньев механизма; рн – число низших кинематических пар; рв – число высших кинематических пар. Вывод этой формулы достаточно очевиден: в плоскости движения звенья обладают тремя степенями подвижности; каждая низшая пара отнимает у звеньев по две степени подвижности, оставляя по одной; каждая высшая пара отнимает, соответственно, по одной степени подвижности.
В соответствии с формулой Чебышева число степеней подвижности шарнирного четырехзвенника (см. рис. 1.15, а) составляет: Wп = 3(4 – 1) – 2 4 = 1.
Рассмотрим кулачковый механизм, представленный на |
рис.1.17. |
Здесь |
|
а) |
б) |
в) |
|
2 |
|
|
|
4 |
|
|
|
3 |
|
|
|
1 |
|
1,1 |
1,0 |
Рис.1.17 |
Рис.1.18 |
звено 1 – кулак, звено 2 – толкатель, звено 3 – ролик, 4 – стойка. Ролик в кулачковых механизмах ставится для уменьшения потерь на трение (замена трения скольжения на трение качения). В механизме три низших кинематических пары (две вращательных и одна поступательная) и одна высшая (соединение кулака и ролика). По формуле Чебышева Wп=3(4 – 1) – 2 3 – 1 1 = 2. Вторая степень подвижности (вращение ролика вокруг своей оси) – «лишняя».

В плоских механизмах, так же как и в пространственных, можно выделить структурные группы; число степеней подвижности плоских структурных групп Wпг находится по формуле:
Wпг=3N – 2 pн – pв . |
(1.4) |
Если Wпг = 0, то такая структурная группа называется плоской группой Ассура. Рассмотрим возможные плоские группы Ассура.
N = 1, тогда рн=1 и рв=1 (в группе Ассура с одним звеном должна быть одна низшая и одна высшая КП – рис.1.18, а). Присоединив однозвенную группу Ассура к одноподвижной группе и к стойке, получим механизм с коромысловым толкателем (рис.1.18, б). Структуру механизма можно представить в виде схемы, называемой графом: вершины графа, обозначаемые кружками, представляют собой структурные группы, внутри которых цифрами проставляют число звеньев группы и число степеней подвижности группы; ребра графа, связывающие вершины, обозначают КП, с помощью которых группы соединяются между собой. Вершина графа с нанесенной косой штриховкой обозначает стойку. Таким образом, граф структуры, изображенный на рис.1.18, в показывает, что структура механизма представляет собой однозвенную одноподвижную группу, которая связана с однозвенной группой Ассура и со стойкой.
|
а) |
б) |
|
|
а) |
|
б) |
1 |
B |
|
B |
1 |
B |
А |
|
|
2 |
А |
|
|
|
B C |
|
|
|
|
|
2 |
|||
|
А |
|
|
C |
А |
|
|
|
C |
|
|
C |
|
|
|
|
|
|
|
|
|
||
|
|
Рис.1.1 |
|
|
|
Рис.1.2 |
|

Если N = 2 (такую группу Ассура называют диадой), тогда рн = 3, рв = 0, то есть в двухзвенной группе Ассура должны быть три низшие кинематические пары. Это могут быть вращательные или поступательные КП в различных сочетаниях. На рис.1.19,а показана диада с тремя вращательными парами (она обозначается буквами ВВВ), а на рис.1.19,б – схема механизма, образованного с этой диадой (это уже упоминавшийся шарнирный четырехзвенник). На рис.1.20,а представлена диада ВВП (две вращательных и одна поступательная КП), а на рис.1.20,б – схема механизма с диадой ВВП (кривошипно-ползунный механизм). Шарнирный четырехзвенник и кривошипно-ползунный механизм имеют одинаковую структуру: к стойке присоединена однозвенная одноподвижная группа, включающая в себя кривошип и вращательную КП, а к ней – диада ВВВ или ВВП На рис.1.21 показан граф структуры этих двух механизмов.
Если N = 3, то в группе Ассура |
|
|
|
|
|
|
|||||
могут быть четыре низшие КП и одна |
|
|
|
|
|
|
|||||
высшая, как на рис.1.22 |
(рн=4, рв=1, |
|
|
|
|
|
|
||||
Wпг=3 3–2 4–1=0), либо три низших и |
|
|
1,1 |
|
2,0 |
||||||
|
|||||||||||
три высших КП (Wпг=3 3–2 3–3=0), |
|
|
|
|
|
|
|||||
либо |
две низших и |
пять высших |
|
Рис.1.21 |
|
||||||
(Wпг=3 3–2 2–5=0); такие группы уже не |
|
|
|
|
|
|
|||||
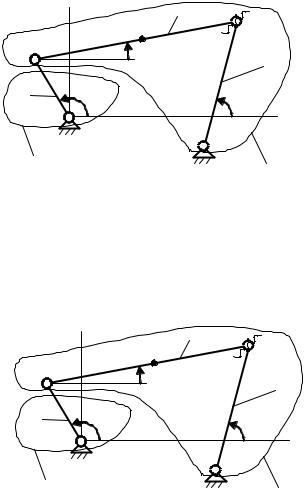
реализуют.Четырехзвенная |
группа |
|
|
|
|
|
|
||||
Ассура (N = 4) должна содержать 6 |
|
|
|
|
|
|
|||||
низших КП, как, например, на рис.1.23, |
1 |
|
|
|
|
3 |
|||||
а. |
(рн=6, |
рв=0, |
Wпг=3 4–2 6=0). |
|
|
|
|
||||
2 |
|
||||||||||
Присоединив |
такую |
|
группу |
к |
|
|
|
|
|
|
|
однозвенной одноподвижной группе и к |
|
|
|
|
|
|
|||||
стойке, получим механизм, показанный |
|
|
Рис.1.22 |
|
|||||||
на рис.1.23, б. Граф структуры такого |
|
|
|
|
|
|
|||||
механизма представлен на рис. 1.23, в. |
|
|
|
|
|
|
|
||||
|
а) |
|
|
б) |
|
|
|
|
в) |
|
|
2 |
3 |
E |
|
C |
|
E |
|
||||
1 B |
C |
|
|
B |
|
F |
|
||||
|
F |
|
А |
D |
|
||||||
|
D |
|
O |
|
|
1,1 |
4,0 |
||||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||
А |
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.1.23

Билет№7. Механизмы переменной структуры. Структурное преобразование. Структурная инверсия.
3. Структурные преобразования механизмов
Представление механизма в виде структурных групп зависит от расположения входа (входного звена). Если перенести вход в механизме, то изменится его структура. Структурное преобразование состоит в условном перенесении входов, целью которого является упрощение структуры механизма.
Рассмотрим механизм, представленный на рис.1.24, а. Если в качестве
а) б)
ВВВ |
C |
|
|
|
|
|
ВВВ |
|
E |
|
|
|
|
|
B |
q |
F |
1,1 |
2,0 |
2,0 |
|
А |
|
||||
|
D |
|
|
|
||
|
|
|
ВВВ |
ВВВ |
||
|
|
|
|
|||
|
|
|
|
|
O 
Рис.1.24
входного звена выбрать звено DF, то весь механизм разобьется на три структурные группы: однозвенную одноподвижную (звено DF со вращательной КП), диаду ВВВ (звенья CD и CE с тремя вращательными КП) и еще одну диаду ВВВ (звенья ОА и АВ с тремя вращательными парами). Граф структуры преобразованного механизма представлен на рис. 1.24, б. В результате структурного преобразования мы условно избавились от громоздкой четырехзвенной группы, заменив ее на две диады.
При исследовании механизмов с несколькими степенями подвижности часто используется структурное преобразование, называемое, по предложению проф. М.З. Коловского, структурной инверсией. При структурной инверсии выходные координаты механизма (координаты рабочих органов) рассматриваются как входные, а обобщенные координаты входных звеньев и пар – как выходные.
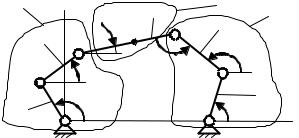
Рассмотрим пример. На рис.1.25, а представлена схема плоской
платформы. Число степеней подвижности по формуле Чебышева Wп=3 (6–1) –2 6=3. Следовательно, в механизме надо задать три входа: q1, q2, q3. В случае, если эти входы заданы так, как показано на рисунке, механизм распадается на следующие структурные группы: две однозвенные

|
|
а) |
|
|
б) |
|
в) |
2 |
3 |
M |
C |
4 |
1,1 |
|
2,0 |
B |
|
|
D |
|
|||
|
|
|
|
|
|
||
|
А |
|
q3 |
1,1 |
3,1 |
1,3 |
|
|
|
|
|||||
|
|
|
5 |
|
|
||
1 |
|
q1 |
|
|
|
2,0 |
|
|
E |
q2 |
|
|
|||
|
|
|
|
|
|
O 
Рис.1.25
одноподвижные (звенья ОА и DE с вращательными КП) и одну трехзвенную одноподвижную (звенья АВ, ВС, CD с четырьмя вращательными КП). Граф структуры такого механизма показан на рис.1.25, б. Выходными координатами в этом случае являются координаты некоторой точки М звена
ВС и угол наклона этого звена . Выполним структурную инверсию механизма. Примем координаты хм, ум, за входные, а обобщенные координаты q1, q2, q3 – за выходные. Тогда структура механизма изменится, а граф структуры будет таким, как показано на рис. 1.25, в: к стойке присоединена однозвенная трехподвижная группа (звено ВС: W=3 1–0=3), которая связана с двумя группами Ассура типа ВВВ (диады, включающие в себя звенья ОА и АВ с одной стороны, и CD и DE – с другой). Тем самым мы понизили максимальное число звеньев в структурных группах с трех до двух.
Билет №8. Геометрический анализ замкнутых механизмов. Пример. |
||||||||
Зависимость выходных параметров от входных обобщенных координат |
||||||||
механизма называется функцией положения механизма. |
|
|
||||||
Для механизма, показанного на рис. 2.1: |
|
|
|
|
||||
|
|
|
|
|
|
xK |
Пx |
(q1); |
|
|
|
|
|
|
|
|
(2.1) |
|
y |
2 |
|
|
|
yK Пy (q1). |
||
|
|
|
|
|
|
|
||
А |
K |
B |
|
Определение |
|
функций |
||
2 |
|
|
|
|||||
|
3 |
положения |
механизма |
составляет |
||||
|
|
|||||||
1 |
q1 |
|
x |
прямую |
задачу |
геометрического |
||
3 |
анализа. |
|
|
|
|
|||
|
O |
|
|
|
|
|||
|
C |
|
Рассмотрим последовательность |
|||||
|
|
|
||||||
|
I |
|
составления |
функции |
положения |
|||
|
|
II |
||||||
|
|
хК(t)=ПХК[q1(t)], yK(t)=ПYК[q1(t)] |
||||||
|
Рис. 2.1 |
|
||||||
|
|
|
1.Проводится |
структурный |
||||
|
|
|
|
анализ механизма: |
|
|
||
Однозвенная одноподвижная СГ I (кривошип 1 и вращательную пару О),
Диада ВВВ, содержащую звенья 2 и 3 и три вращательные пары А, В и С.
|
y |
2 |
|
А |
K |
B |
|
2 |
|
3 |
|
|
|
||
|
|
|
|
1 |
q1 |
3 |
x |
|
O |
||
|
C |
|
|
|
I |
|
|
|
|
II |
|
|
Рис. 2.1 |
|
|
|
|
|
2.В каждой структурной группе вводятся входные и выходные
координаты.
3.Путем размыкания некоторых кинематических пар структурные группы приводят к открытым кинематическим цепям типа «дерево».
4.Вводятся групповые координаты, определяющие, вместе с входными, положение звеньев «дерева». Число групповых координат должно быть равно числу разомкнутых связей (на рис. 2.1 это углы 2 и 3).
5.Составляются условия замыкания ранее разомкнутых связей и функции положения. На основе этих условий получаются групповые уравнения, связывающие входные, выходные и групповые координаты структурной группы.

|
y |
K |
2 |
|
|
|
|
|
|
А |
|
B |
|
Функции положения для группы I: |
|||||
|
2 |
|
3 |
||||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
q1 |
3 |
x |
xA |
l1 cosq1, |
|
(2.2) |
||
|
O |
|
уA l1 sin q1. |
|
|||||
|
|
C |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
|
I |
|
|
|
|
|
|
|
|
|
|
|
II |
Групповые уравнения для группы |
|||||
|
|
Рис. 2.1 |
|
||||||
|
|
|
|
II: |
|
|
|
|
|
|
|
xA l2 cos 2 |
xC |
l3 cos 3; |
(2.3) |
|
|
|
|
|
|
yA l2 sin 2 |
yC |
l3 sin 3. |
|
|
|
|
|
Уравнения |
получены |
из условия |
замыкания |
связей |
в |
шарнире |
В |
||
(неизвестны групповые координаты 2 и 3) |
|
|
|
|
|||||
Функции положения точки К группы II:
xK |
xA |
lAK cos 2 |
; |
|
|
|
(2.3 ) |
yK yA lAK sin 2.
ФП для механизма с несколькими (W) степенями подвижности:
xs Пs (q1,...,qW ), s = 1, …, m, |
(2.4) |
где m – число выходных координат.
|
y |
|
|
|
|
|
Составление функций положения |
|
|
3 M |
3 |
|
|
III |
на примере плоской платформы (рис. |
||
|
B |
C |
4 |
2.2). |
|
|||
2 |
|
|
|
|||||
|
|
|
4 |
II |
|
|
||
|
|
q3 |
|
|
|
|||
А |
|
2 |
D |
1. Структурный анализ механизма. |
||||
|
|
|
||||||
|
|
|
5 x |
|||||
1 |
|
q1 |
|
E |
q2 |
Три структурные группы: |
||
|
O |
|
|
|
|
|
|
однозвенные одноподвижные I |
|
I |
|
|
|
|
|
и II, |
|
|
|
|
|
|
|
|
трехзвенную одноподвижную |
|
|
|
Рис. 2.2 |
|
|
|
|||
|
|
|
|
|
III. |
|
||
|
|
|
|
|
|
|
2. |
Введем входные и выходные |
координаты.
Группа I: вход хО, уО, q1, выход хА, уА;

|
y |
|
|
|
|
|
Группа II: вход хЕ, уЕ, q2, |
||||
|
|
3 |
|
|
III |
выход xD, yD; |
|
||||
|
3 |
M |
C |
4 |
|
||||||
|
|
|
Группа III: вход хА, уА, хD, yD, q3, |
||||||||
2 |
B |
|
|
|
|||||||
|
|
q |
|
4 |
II |
выход х |
, у |
|
, |
. |
|
|
|
|
|
М |
|||||||
А |
2 |
|
D |
|
|
М |
|
3 |
|
||
|
3 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
q1 |
|
|
E |
5 |
x |
3.Произведем |
размыкание |
|||
|
|
q2 |
группы III в шарнире C |
||||||||
|
O |
|
|
|
|
|
|||||
|
I |
|
|
|
|
|
4.Введем |
|
|
групповые |
|
|
Рис. 2.2 |
|
|
|
координаты: 2, 3, и 4. |
||||||
|
|
|
|
5.Запишем условия замыкания: |
|||||||
|
|
|
|
|
|
|
|||||
xC3 = xC4, уC3 = yC4.
Составим групповые уравнения:
Группа I,II:
xA l1 cosq1, , |
xD xE l5 cosq2 |
; |
||
уA l1 sin q1. |
yD yE l5 sin q2 ; |
|||
|
|
Группа III: |
||
xA l2 cos 2 |
l3 cos 3 |
xD l4 cos 4 ; |
||
yA l2 sin 2 |
l3 sin 3 |
|
yD l4 sin 4. |
|
Дополнительное уравнение для углов:
3 + q3 = 4.
(2.5)
(2.6)
Обратная задача геометрического анализа: определение обобщенных входных координат в зависимости от выходных, т.е. отыскание функций:
II |
y |
3 |
|
I |
|
III |
|
3 M |
C |
4 |
|
||
2 |
B |
|
|
|
||
|
q3 |
|
4 |
|
|
|
А |
2 |
D |
|
|
||
|
|
|
||||
|
|
5 |
|
|||
1 |
q1 |
|
E |
q2 |
x |
|
|
O |
|
|
|
|
|
|
Рис. 2.3 |
|
|
|
|
|
qк = Фк (х1, … , хm), к = 1, … , W. (2.7)
m= W (число выходных координат равно числу степеней подвижности):
задача может иметь одно или несколько решений;
m> W:
задача в общем случае не имеет решения;
m< W:
|
задача |
имеет |
бесконечное |
||||
II |
y |
|
3 |
|
I |
|
III |
|
3 M |
C |
4 |
|
|||
2 |
B |
|
|
|
|
||
|
|
q3 |
|
4 |
|
|
|
А |
2 |
|
D |
|
|
||
|
|
|
|
||||
|
|
|
5 |
|
|||
1 |
q1 |
|
|
E |
q2 |
x |
|
|
O |
|
|
|
|
|
|
|
|
Рис. 2.3 |
|
|
|
|
|
число решений (некоторое число координат (а именно W – m) можно задать произвольно).
Пример трехподвижной платформы. Дано: хМ, уМ, 3.
Определить: q1, q2, q3.
Структурный анализ инверсного механизма. Три структурные группы:
однозвенная трехподвижная I ,
II и III – двухзвенные группы Ассура типа ВВВ.. Составим уравнения для группы I:
xB xM |
lBM cos 3 |
; |
|
|||
yB yM |
lBM sin 3 |
; |
(2.8) |
|||
xC xM lMC cos 3 |
; |
|||||
|
||||||
yC yM lMC sin 3. |
|
|||||
Для группы II : |
|
|
|
|
|
|
l1 cosq1 l2 cos 2 |
xB ; |
(2.9) |
||||
l1 sin q1 l2 sin 2 |
yB . |
|||||
|
||||||
Для группы III: |
|
|
|
|
|
|
xE l5 cosq2 |
l4 cos 4 |
xC |
; |
|||
yE l5 sin q2 |
l4 sin 4 |
|
|
(2.10) |
||
yC . |
||||||
Дополнительное уравнение для углов: |
|
3 + q3 = 4. |
||||

Билет №9. Решение групповых уравнений
Если групповые уравнения имеют решение, то оно, как правило, является
|
y |
|
|
не единственным. |
|
|
|
2 |
|
xB xA AB cos 2 ; |
|||
А |
K |
B |
|
|||
2 |
|
3 |
yB yA AB sin 2 |
e. |
||
|
|
|||||
|
|
|
|
|
|
|
1 |
q1 |
3 |
x |
|
|
|
|
O |
|
|
|
||
|
C |
|
Определяем: |
из |
второго |
|
|
I |
|
||||
|
|
II |
уравнения находим sin 2, |
|
||
|
Рис. 2.1 |
|
|
|
1 sin2 2 , |
|
|
|
|
|
находим cos 2 |
||
подставляем в первое выражение и находим xB.
cos 2 М 
 1 sin2 2 , где M 1 – способ сборки.
1 sin2 2 , где M 1 – способ сборки.
Шарнирный четырехзвенник.
А
|
|
|
|
q1 |
B 1 |
M= -1 |
|
|
|
|
|
||
|
|
|
M=1 |
O |
|
|
|
|
|
|
|
C |
|
М = 1 |
(положение АВ2С ) |
|
обход |
|
|
|
– |
B 2 |
|
|
|||
шарниров в последовательности А,В,С |
|
|
||||
Рис. 2.5 |
|
|
||||
происходит против часовой стрелки. |
|
|
|
|||
М = –1 (положение АВ1С ) – |
обход шарниров в последовательности А,В,С |
|||||
происходит по часовой стрелке. |
|
|
|
|
|
|
2 |
M = -1 |
А |
M = 1 |
|
|
|
|
q |
1 |
|
|
|
|
|
B 1 |
|
|
|
||
А |
B 2 |
е |
|
|
|
|
O |
|
|
|
|
||
|
|
|
|
|
|
|
Рис. 2.4