

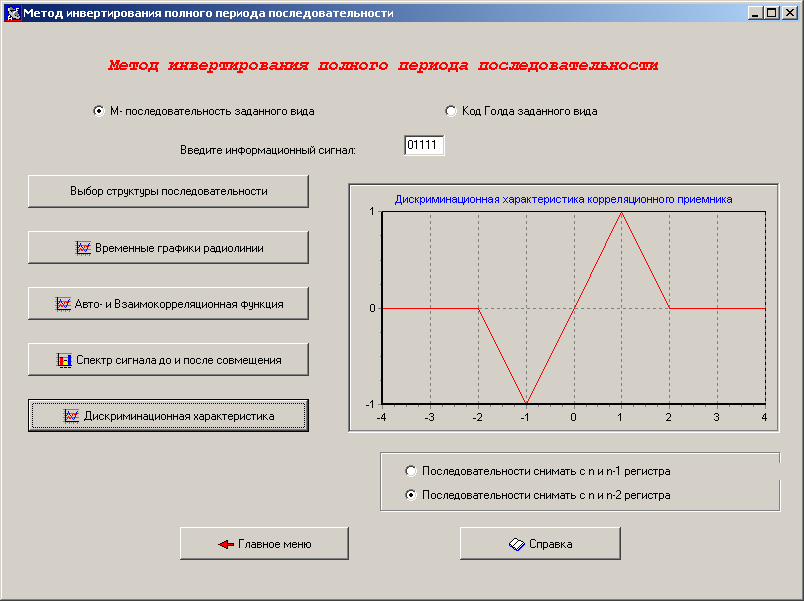
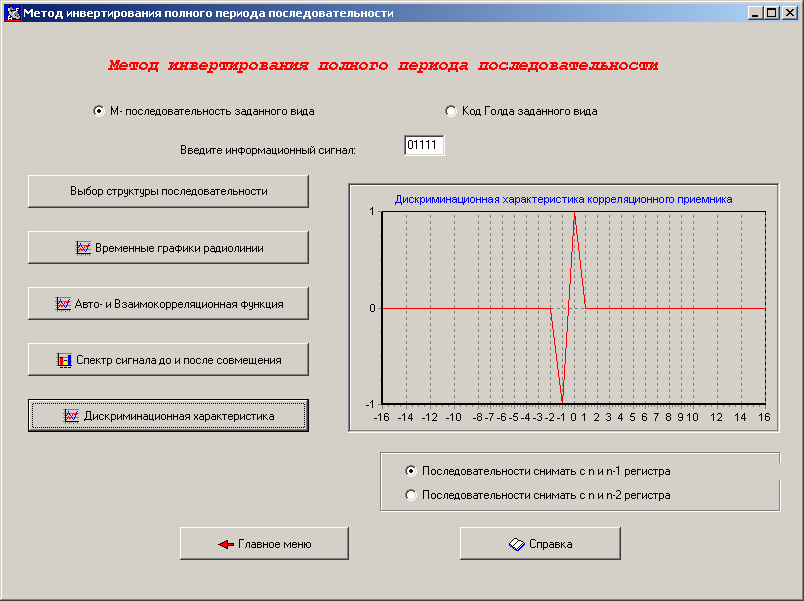
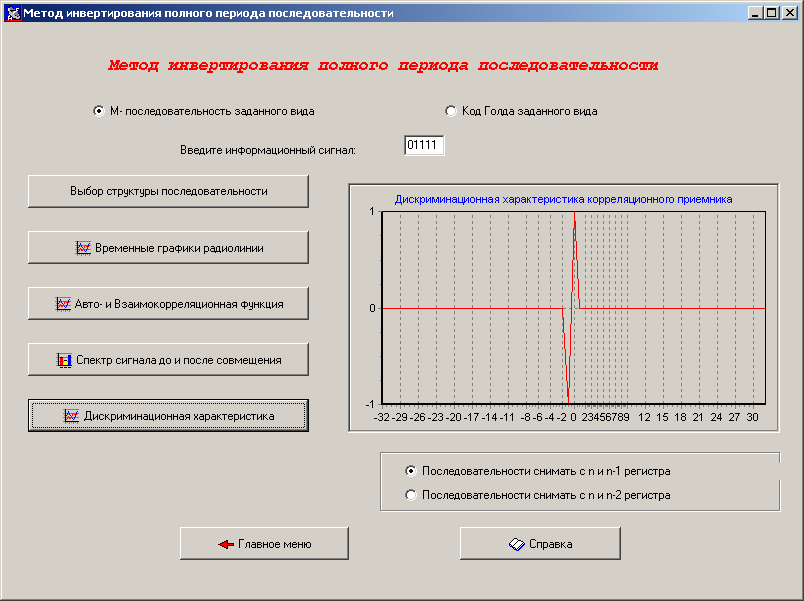
2. Метод инвертирования полного периода последовательности
2.1 М - последовательность
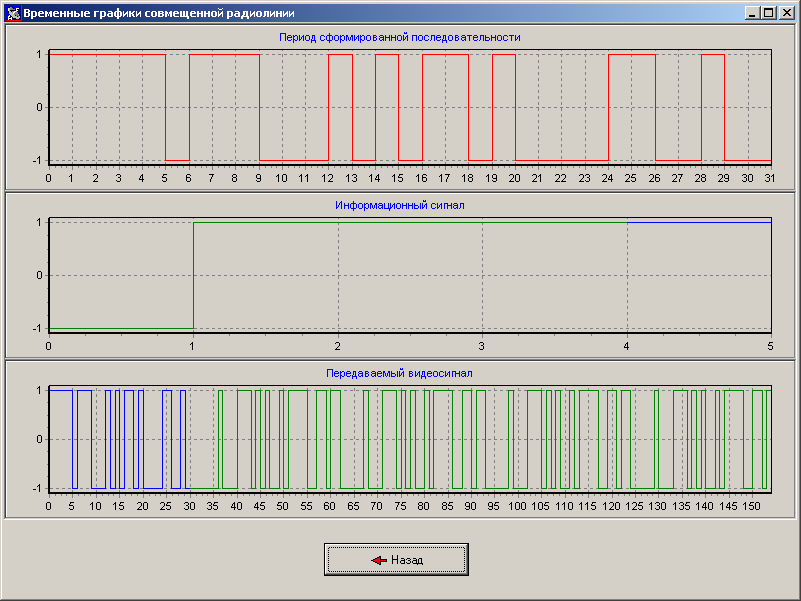
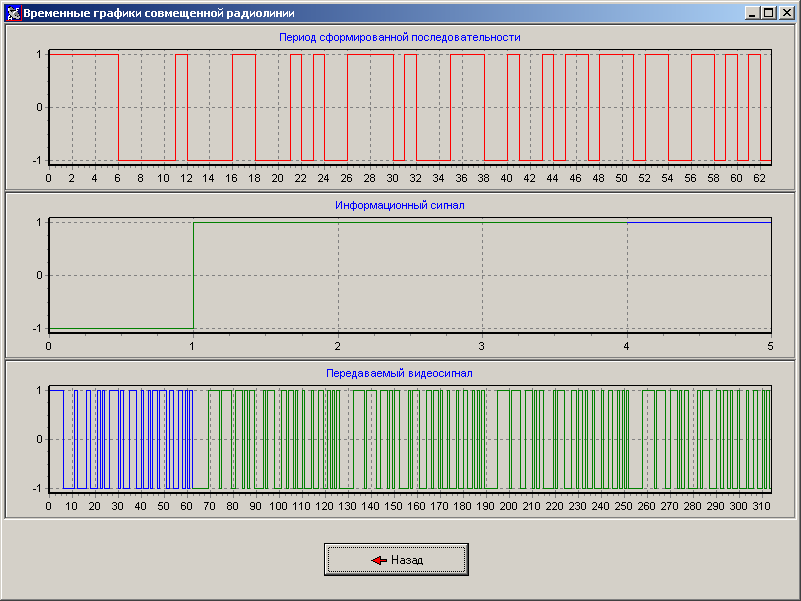
В совмещённых радиолиниях сложный сигнал на основе ПСП должен использоваться для двух основных целей:
1) Для измерения дальности до объекта путём слежения за задержкой принимаемого сигнала.
2) Для передачи информации для чего необходимо осуществлять дополнительную модуляцию ПСП двоичными символами передаваемого сообщения.
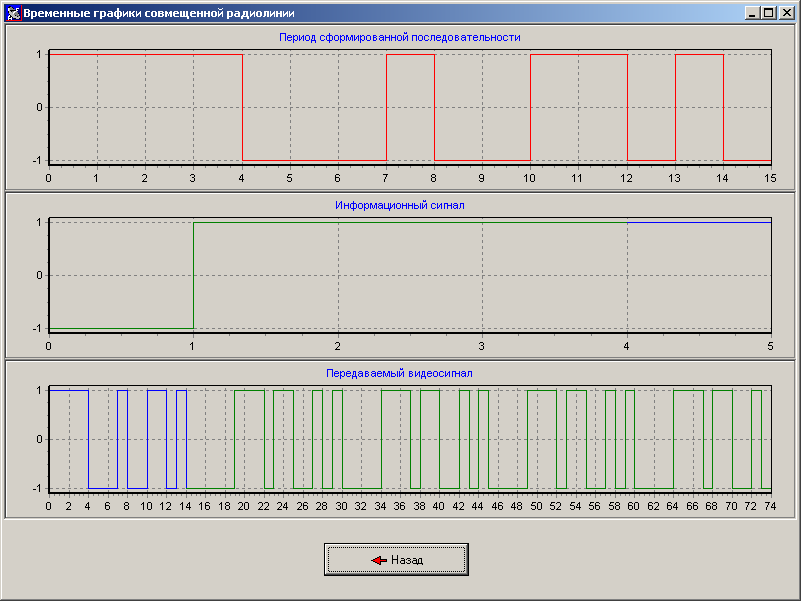
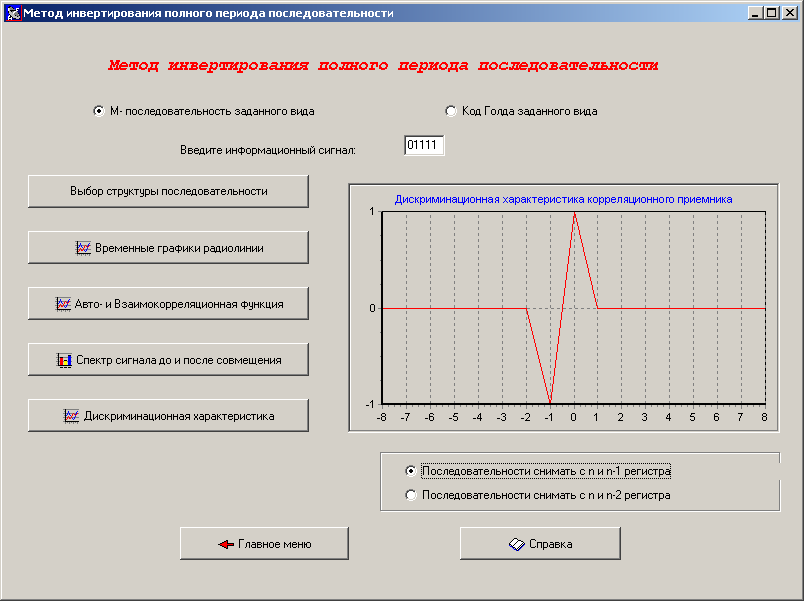
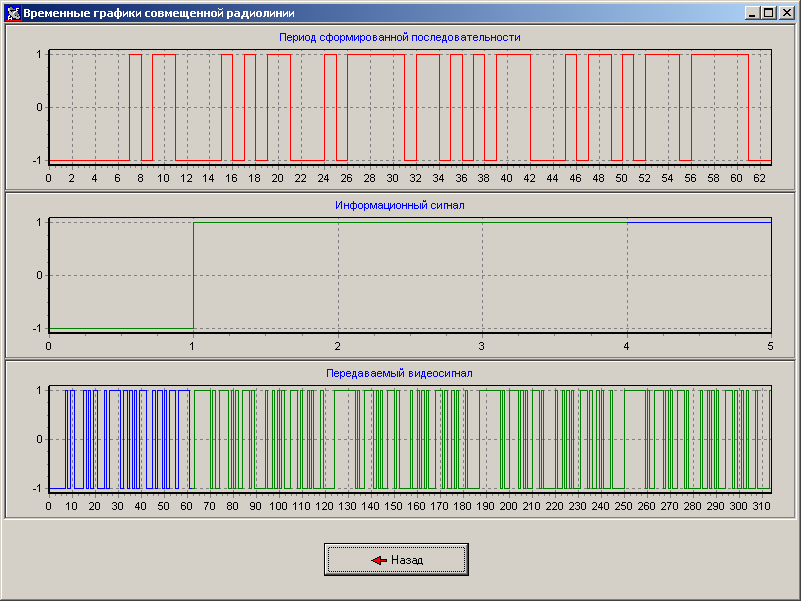
Наибольшее распространение получила инверсная модуляция ПСП при которой осуществляется сложение по модулю два символов информации(мой информационный сигнал 01111) и символов ПСП . В результате этой операции при передаче информационного нуля(0) символы ПСП остаются неизменными, а при передаче информационной единицы(1) меняются противоположным (инвертируются).
1) Трехкаскадный регистр сдвига: полином Х3+Х+1
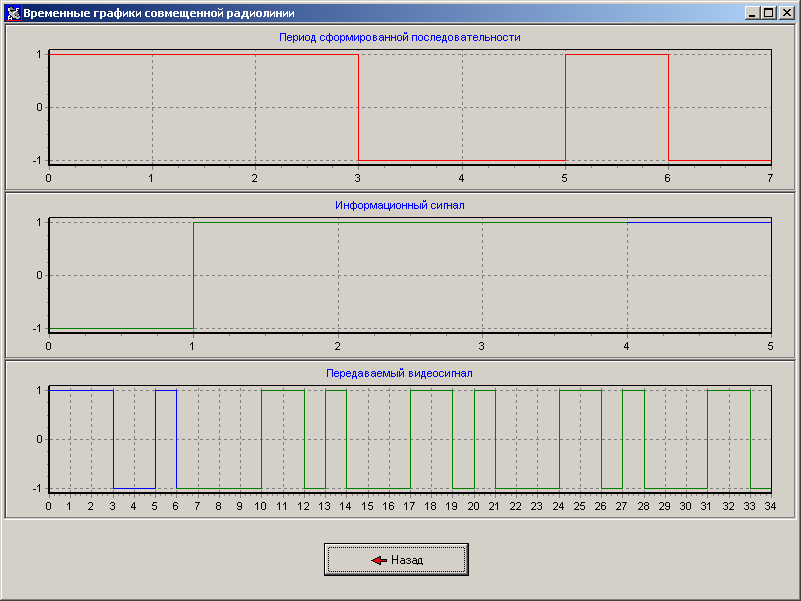
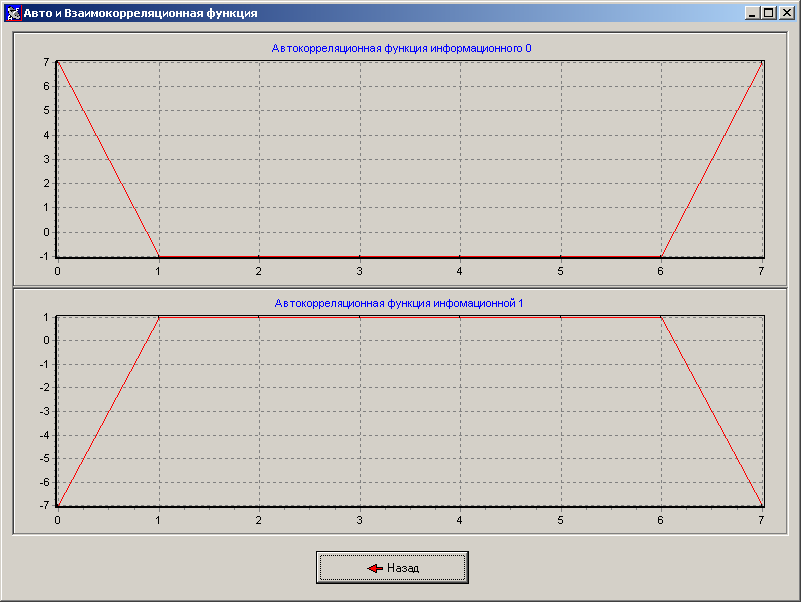
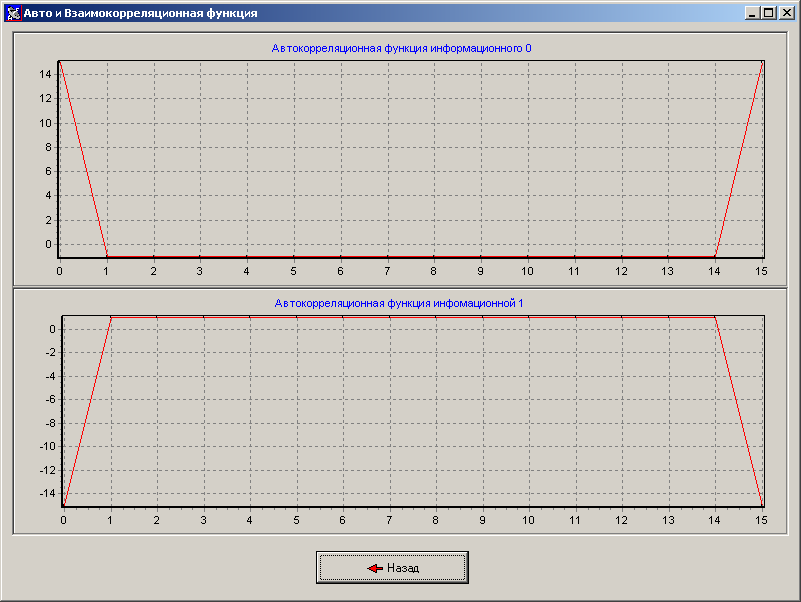
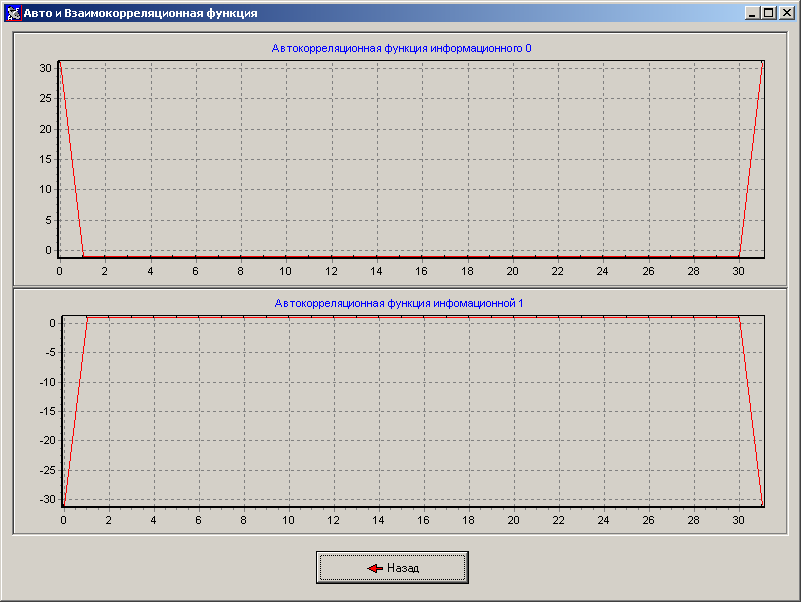
Автокорреляционные функции
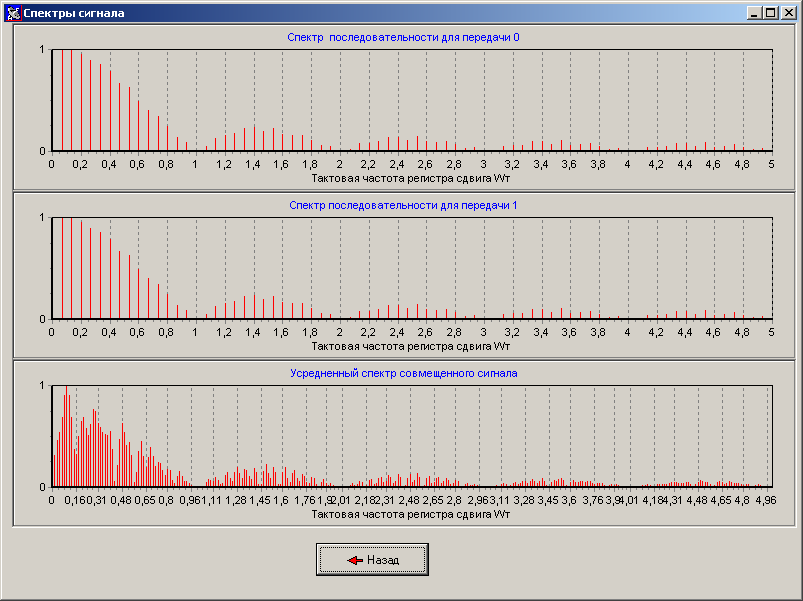
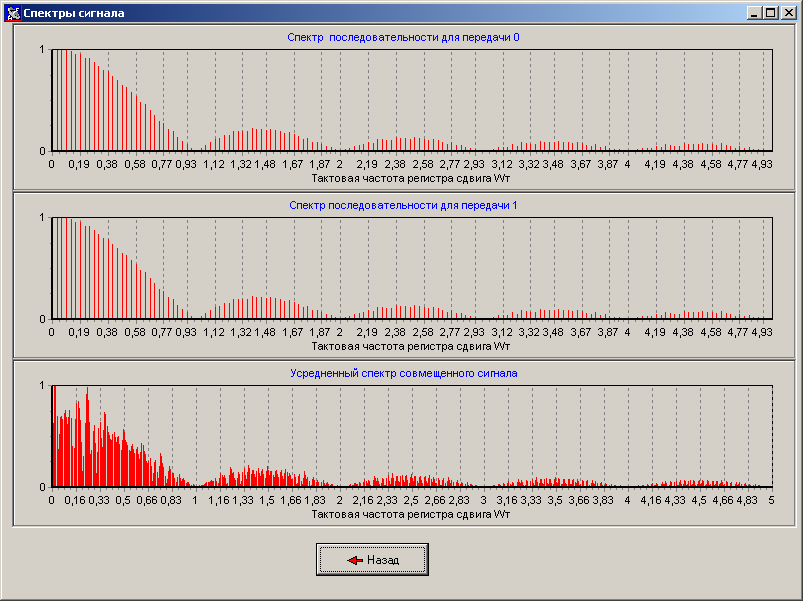
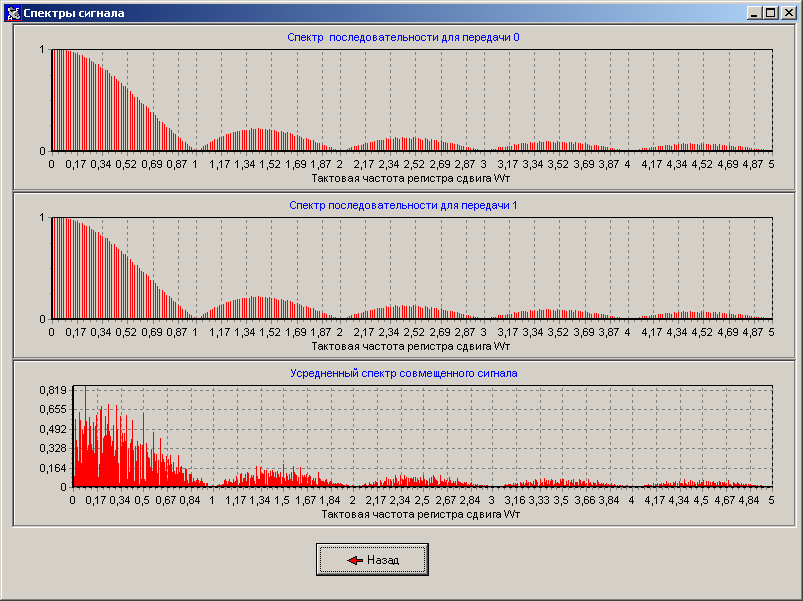
Спектры сигнала

Последовательность
снятая с n и n-1
регистра

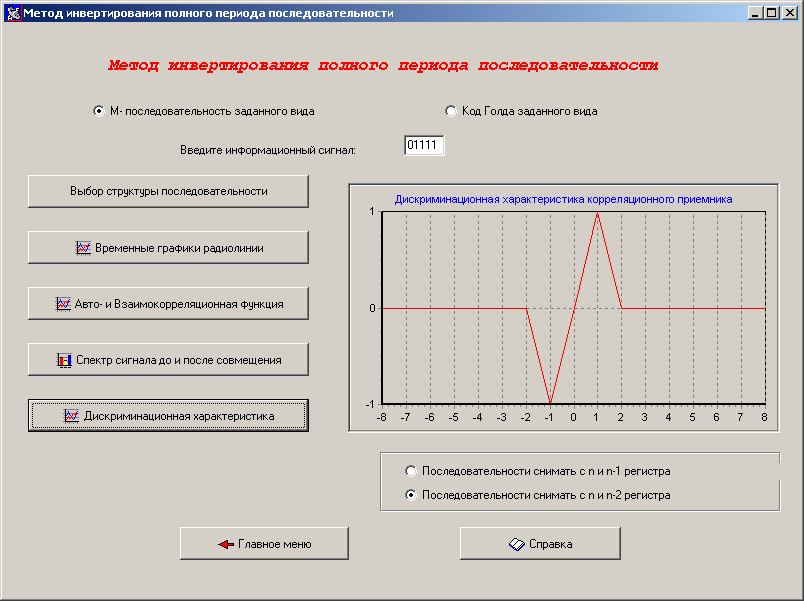
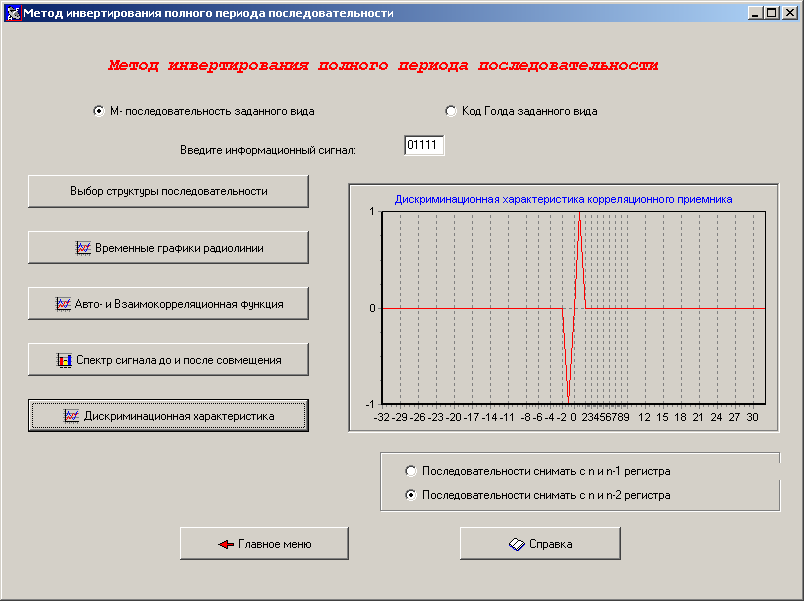
Последовательность снятая с n и с n-2 регистра
2) Четырехкаскадный регистр сдвига: полином Х4+Х+1
Автокорреляционные функции
Спектр сигнала
Последовательность снятая с n и n-1 регистра
Последовательность снятая с n и с n-2 регистра
3) Пятикаскадный регистр сдвига: полином Х5+Х2+1
Автокорреляционные функции
Спектры сигнала
Последовательность с n и n-1 регистров

Последовательность с n и n-2 регистров
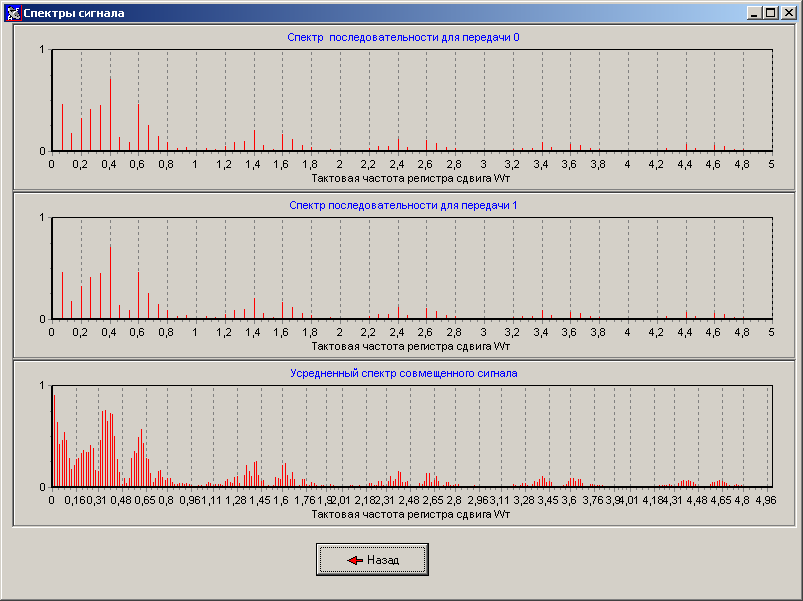
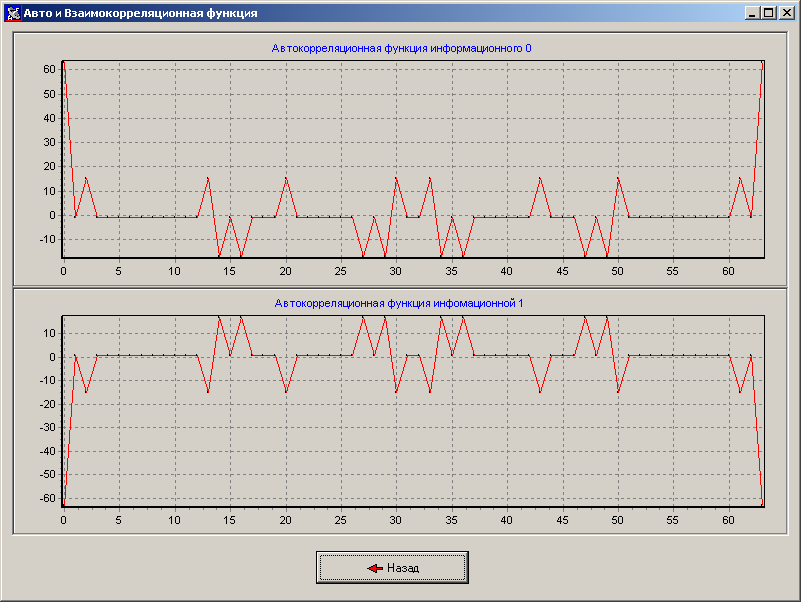
4) Шестикаскадный регистр сдвига: полином Х6+Х+1
Автокорреляционные функции

Спектры сигнала
Последовательность с n и n-1 регистров
Последовательность с n и n-2 регистров
Вывод:
Различаются дискриминационные характеристики первого и второго типа.
У дискриминатора I типа ширина линейного участка меньше, а крутизна больше, за счет этого время вхождения в синхронизм больше – это преимущество, но и точность измерения задержки входного сигнала меньше – это недостаток.
У дискриминатора II типа ширина линейного участка больше, а крутизна меньше, отсюда преимущество – больше точность измерения задержки входного сигнала, и недостаток – меньше время вхождения в синхронизм.
2.2 Коды Голда:
1)Полином Х4+Х+1/Х4+Х3+1

Автокорреляционные функции

Спектры сигнала
Последовательность с n и n-1 регистров


Последовательность с n и n-2 регистров
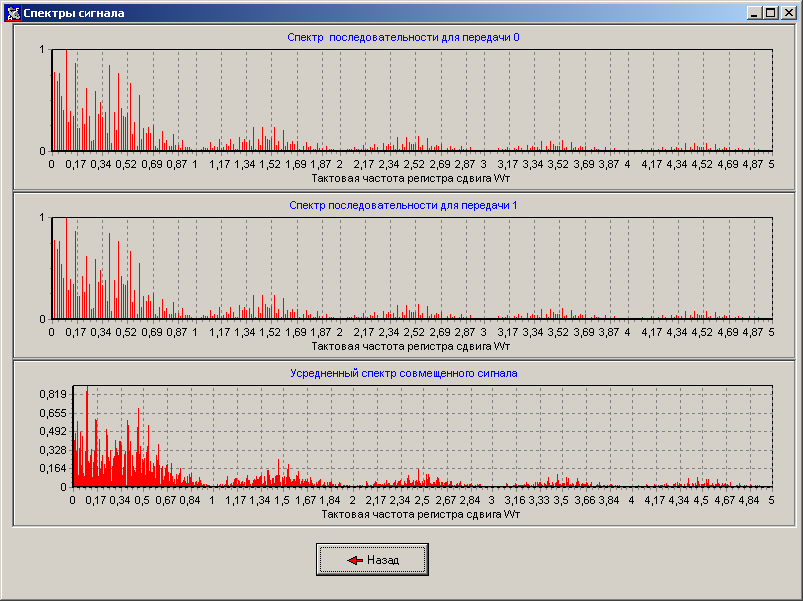
2)Полином Х6+Х+1/Х6+Х5+Х2+Х+1
Автокорреляционные функции
Спектры сигнала
Последовательность с n и n-1 регистров


Последовательность с n и n-2 регистров