

2.2.3 Окно потенциальных проблем (ppd)
2.2.3.1 Назначение и свойства окна ppd
Окно потенциальных проблем Potential Problem Display (PPD или ОПП) является средством для графического и списочного представления потенциальных проблем и проблем ВП, относящихся к данному сектору и определенной буферной зоне вокруг сектора (ИПС) в пределах следующих 20 минут (ИПС). Пример окна PPD представлен на рисунке 2.2-1.
Окно PPD динамически обновляется при обновлении информации или по вводам диспетчера.
Окно PPD содержит следующие элементы:
списочную форму представления потенциальных проблем;
графическую форму представления потенциальных проблем;
элементы управления отображением.
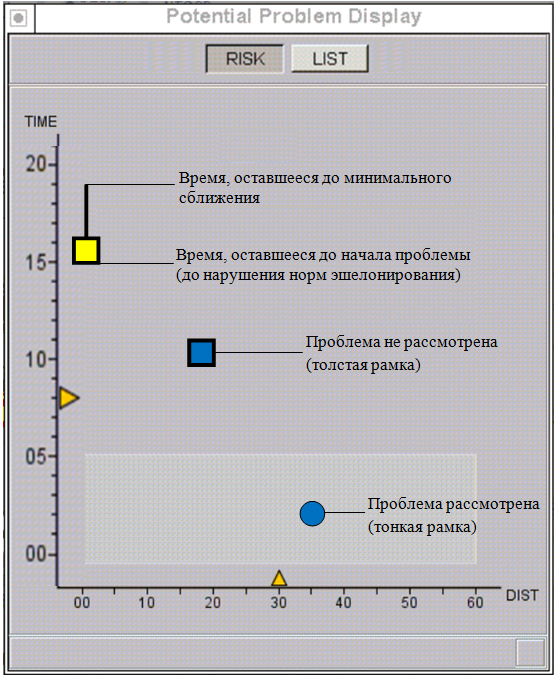
Рисунок 2.2-1
Окно PPD обладает следующими свойствами:
не прозрачное, имеет рамку и заголовок;
может быть перемещено;
может быть изменено в размерах с помощью элемента управления в правом нижнем углу (нажать любую клавишу мыши и, удерживая, перемещать вверх, вниз, вправо или влево);
может быть свернуто в икону, если в нем отсутствует информация. Если появляется проблема, окно разворачивается автоматически;
по умолчанию при включении пульта:
окно открыто на ИВО и ПД;
отображаются обнаруженные КС и РКС в секторе управления, а также проблемы, возникающие за 2 минуты до входа и в течение 2-х минут после выхода из сектора;
представлена графическая форма окна.
В окне PPD отображаются конфликты и риски конфликтов. Проблема классифицируется как:
- "конфликт", если она происходит между текущей высотой (AFL) и заданным эшелоном ВС (CFL) (или на эшелоне входа, если ВС еще не вошло в сектор);
- "риск конфликта", если она происходит за пределами заданного эшелона (в слое высот от заданного эшелона (CFL) до эшелона передачи (TFL).
В верхней части окна расположены кнопки RISK, LIST/GRAF.
Кнопка «RISK» предназначена для вызова/удаления информации окне PPD о ВС, у которых существует риск конфликтов в графической форме представления информации.
Кнопка «LIST/GRAF» предназначена для переключения формы отображения информации в окне PPD. При отображении окна в форме списка на кнопке появляется надпись «GRAF», при представлении окна в форме графика на кнопке появляется надпись «LIST».
2.2.3.2 Списочная форма представления информации
При нажатии ЛК на кнопку«LIST» в окне PPD появляется список потенциальных проблем. Пример окна списочной формы показан на рисунке 2.2-2.
Окно содержит следующие данные:
шкала времени, рассчитанная для представления информации до 20 минут вперед (ИПС);
символ потенциальной проблемы;
формуляр проблемы, если вызван (описание приведено далее);
оранжевый треугольник на оси времени для ограничения области пространства, при попадании проблемы в которую автоматически появляется точка в ФС.
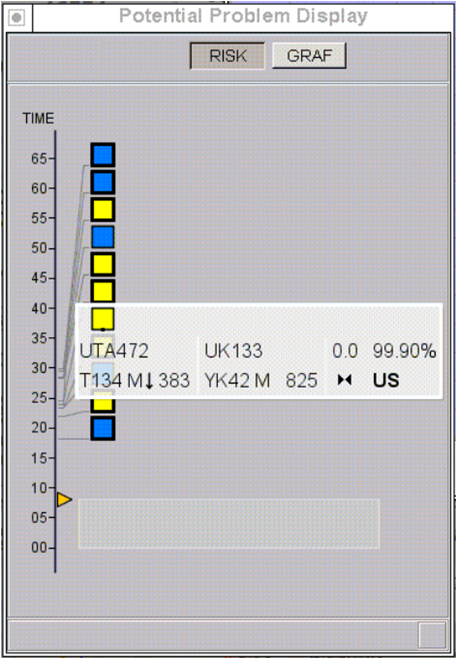
Рисунок 2.2-2
2.2.3.3 Графическая форма представления информации
При нажатии ЛК на кнопку «GRAF» в окне PPD появляется графическое представление потенциальных проблем и проблем ВП. Пример окна с графической формой приведен на рисунке 2.2-3.
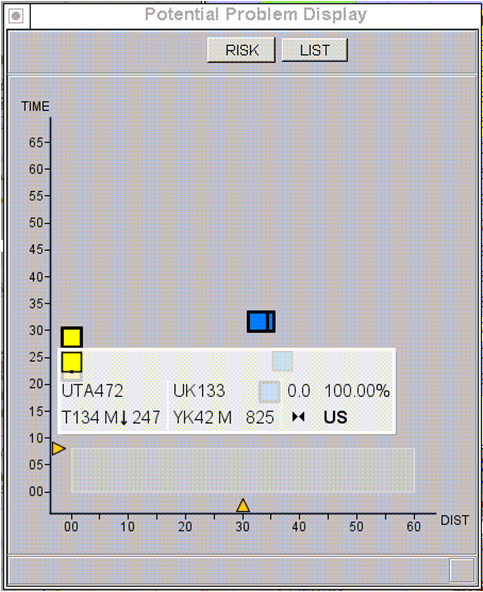
Рисунок 2.2-3
Зона ответственности диспетчера ДРУ (от 0 до 8 мин) выделена светло-серой областью.
При графическом представлении окна PPD координатные оси имеют следующее назначение:
- ось Х – минимальное расстояние сближения, указывает расстояние в километрах от 0 до максимум 100 км (ИПС). Шкала оцифрована через 5 км. Диапазон представления минимального расстояния может быть изменен следующим образом: нажать ЛК мыши на шкале оси Х и, удерживая ее, изменить диапазон, передвигая мышь вправо или влево. Увеличение или сокращение рассматриваемого минимального расстояния сближения расширяет или сужает объем охватываемых потенциальных проблем;
- ось Y – время до достижения определенного рубежа в минутных интервалах от 0 до 20 мин (ИПС) с маркировкой каждой минуты. Шкала времени может быть изменена способом, аналогичным описанному для оси Х.
В данных координатах расположены символы потенциальных проблем. Вид символа и свойства в графическом представлении идентичны символу в списочном представлении. Положение символов обновляется с темпом в 30 секунд (ИПС) или по вводам диспетчера.
В графической форме символы перемещаются сверху вниз в направлении сокращения времени, оставшегося до достижения минимального расстояния между ВС. Если планы полетов конфликтующих ВС не изменяются, то движение символов происходит вертикально сверху вниз при каждом обновлении. Если обнаруживается изменение, влияющее на минимальное расстояние сближения между ВС, то символы перемещаются также и в горизонтальном направлении.
Символ проблемы может быть представлен в виде прямоугольника, ромба или кружка.
Потенциальная проблема отображается прямоугольником или ромбом с черными границами в координате Х, относящейся к предсказанному минимальному расстоянию между двумя конфликтующими ВС в км, и в координате Y, относящейся ко времени в мин, оставшемуся до начала конфликта (нижняя граница рамки).
Прямоугольник превращается в кружок автоматически при входе потенциальной проблемы в тактическое воздушное пространство ДРУ, если до проблемы осталось менее 8 минут (ИПС).
Проблема ВП показывается ромбиком в координате Х, относящейся к минимальному прогнозируемому расстоянию в км, и в координате Y, относящейся ко времени, оставшегося для достижения этой точки (в мин). Проблемы ВП перемещаются последовательно в ОПП при каждом обновлении.
Риск конфликта отображается в коричневой рамке.
Оранжевые треугольники на осях времени и расстояния предназначены для ограничения области пространства, при попадании проблемы в которую автоматически появляется признак проблемы в ФС (красная точка). Положение треугольников на осях изменяется диспетчером. Для этого нужно нажать ПК мыши и, удерживая на треугольнике, перемещать мышь. При этом под треугольником отображается динамически изменяющееся значение изменяемого параметра. Если символ проблемы находится ниже оранжевого треугольника на оси времени и левее оранжевого треугольника на оси минимального расстояния, в ФС появляется красная точка, свидетельствующая о среднесрочном конфликте и привлекающая внимание диспетчера. Оранжевый треугольник может быть установлен на любое значение.
Если минимальное расстояние меньше, чем норма эшелонирования, над каждой потенциальной проблемой отображается линия вдоль оси времени. Линия начинается в верхней части символа проблемы, как показано на рисунке 2.2-4, и заканчивается в точке, соответствующей по оси Y времени, оставшемуся до достижения минимального сближения.
![]()
![]()
Рисунок 2.2-4
При наведении курсора на символ проблемы меняется окраска цвета знаков ФС конфликтующих ВС на ИВО и в окне Лупа.
При щелчке ЛК мыши на символе проблемы на ИВО отображаются траектории конфликтующих ВС.
Отображение цвета и формы рамки символов проблемы показывают следующее:
проблема уже была рассмотрена или нет (соответственно толстая или тонкая рамка);
если конфликт имеет высокую вероятность возникновения (более 0,95, т.е. более 95%), проблема отображается желтым цветом
 ;
;если проблема имеет низкую вероятность возникновения (менее 0,0001, т.е. менее 0,01%), проблема отображается серым цветом
 ;
;в остальных случаях (вероятность возникновения от 0,01 до 95 %) проблема отображается синим цветом
 ;
;если проблема имеет статус STCA, она отображается красным цветом
 .
.
Для диспетчера это означает:
- желтый цвет: нужно принимать решение о необходимости вмешательства в движение ВС для разрешения конфликта (конфликт произойдет с большой вероятностью);
- серый цвет: на конфликт можно уделять меньше внимание (с большой вероятностью он не произойдет);
- синий цвет: ждать, конфликт может разрешиться сам собой (требуется повышенное внимание, имеется неопределенность возникновения конфликта).
Проблема отображается, как рассмотренная после ее просмотра путем нажатия ЛК или ПК мыши на символе потенциальной проблемы в окне PPD или VAW.
Примеры:
-
проблема не рассмотрена - толстая черная
(или коричневая – для риска конфликта)
рамка

-
проблема рассмотрена - тонкая рамка
 .
.
Если для потенциальной проблемы была включена сигнализация STCA, то символ должен отображаться на фоне цвета тревоги ALERT. Это представление должно иметь приоритет над любыми другими представлениями.
2.2.3.4 Описание и пультовые операции с формуляром проблемы
При наведении курсора на символ проблемы или проблемы ВП в окне PPD осуществляется временное открытие рядом с символом проблемы обрамленной зоны - формуляра проблемы, в котором имеются строки текста, содержащие информацию.
Пример формуляра проблемы приведен на рисунке 2.2-5.

Рисунок 2.2-5
Одновременно на ИВО цвет символов ФС, вовлеченных в проблему, изменяется на красный.
Формуляр проблемы содержит:
В первой строке:
позывные (номера рейсов) ВС;
прогнозируемое минимальное расстояние между ВС в точке схождения (км);
вероятность возникновения проблемы (%).
Во второй строке для каждого ВС:
тип ВС;
весовая категория по турбулентности спутного следа ВС;
тенденция изменения высоты;
заданный эшелон.
вид конфликта в виде символа (догон, пересечение, встречные и т.д.);
обозначение точки схождения, если имеется.
Символ вида конфликта может быть следующим:
 догон;
догон;
 встречные;
встречные;
 пересекающиеся;
пересекающиеся;
 слияние
(может не отображаться).
слияние
(может не отображаться).
Если конфликт (риск конфликта) относится к проблеме между ВС и областью ОИВП, то второй формуляр в зоне проблемы содержит:
обозначение зоны ОИВП (в первой строке);
нижний и верхний эшелоны ОИВП (во второй строке).
При обращении щелчком ЛК к символу проблемы в окне PPD, или к формуляру конфликта, или к символу конфликта в ФС на ИВО отображаются маршруты конфликтующих ВС зеленого цвета с маркировкой ППМ, как при вызове маршрута по плану, с подкрашенными участками от начала до окончания нарушения эшелонирования. Если выбраны конфликтующие ВС, то эти участки подкрашены красным цветом. Если выбраны ВС, по котором обнаружен риск конфликта - желтым цветом.
При щелчке ЛК на формуляре проблемы он отображается в постоянном режиме. При повторном щелчке формуляр снимается с отображения.
При помещении курсора на поле позывного ВС в формуляре проблемы на ИВО подсвечивается формуляр сопровождения данного ВС. Одновременно на ИВО подсвечивается формуляры сопровождения ВС, вовлеченных в проблему.