

Структурная схема сар позиционирования

Расчет регулятора тока.
Рассмотрим контур тока:

Токовый контур включает в себя регулятор тока. Для более точной настройки контура необходимо рассчитать передаточную функцию регулятора тока. С помощью регулятора необходимо улучшить качество переходного процесса. Скорректированная система должна обеспечит запас по фазе ∆φ=34º.
Для расчёта регулятора воспользуемся частотным методом с использованием ЛАЧХ и ЛФЧХ разомкнутой системы.
Синтез регуляторов с помощью логарифмических частотных характеристик производится так:
1. Необходимо построить ЛАЧХ Lнск(ω) и ЛФЧХ φнск(ω) нескорректированной системы.
2. Определить желаемую ЛАЧХ системы, т. е. ЛАЧХ, при которой выполняются заданные требования к качеству управления. Желаемая ЛАЧХ Lск(ω) скорректированной системы состоит из нескольких основных участков:
1.низкочастотный. Определяет установившиеся детерминированные режимы.
2.среднечастотный. Определяет качество переходного процесса (перерегулирование, время переходного процесса).
3.высокочастотный. Не оказывает существенного влияния на качество переходного процесса, поэтому её принимают совпадающей с ЛАЧХ нескорректированной системы.
Произведём синтез регулятора тока:
Переходный процесс нескорректированной системы:

Как видно из рисунка система обладает большой колебательностью, большим перерегулированием σ=81% и малым запасом по фазе ∆ φ=60.
Для улучшения качества переходного процесса в качестве регулятора применим интегро-дифференцирующее звено. Скорректированная система должна обеспечить запас по фазе ∆ φ=340.
![]()
Переходный процесс скорректированной системы:

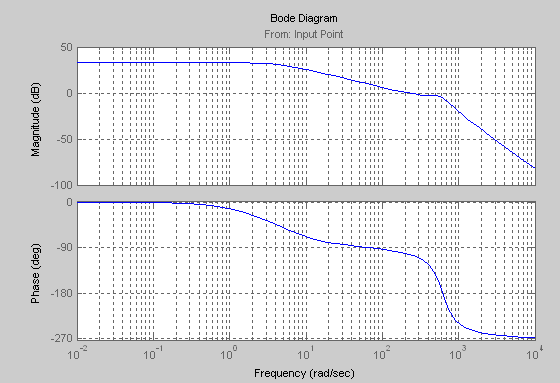
ЛЧХ контура тока:

Постоянные времени определим из графиков ЛЧХ.
T1=0,0033с; T2=0,0035с; T3=0,003с; T4=0,0007с.
Из рисунка видно что перерегулирование системы σ=4%, а время переходного процесса tп=2,1с.
Техническая реализация данного звена :

Произведём расчёт параметров звена.
T1+T4=T2+(1+R1/R2)T3
T2=R1C1
T3=R2C2
Подставляя значения постоянных времени определяем параметры звена:
R1=1,2 кОм R2=1 кОм C1=2 мкФ C2=3 мкФ.
Расчет регулятора скорости.
Рассмотрим контур скорости :

Контур скорости включает в себя регулятор скорости. Для более точной настройки контура необходимо рассчитать передаточную функцию регулятора скорости. С помощью регулятора необходимо улучшить качество переходного процесса. Скорректированная система должна обеспечит запас по фазе ∆φ=.
Переходный процесс нескорректированной системы :

Система обладает малым быстродействием. Для улучшения качества переходного процесса в качестве регулятора применим пропорционально-интегральный регулятор. Скорректированная система должна обеспечить запас по фазе ∆ φ=700 и по амплитуде ∆L=5,04 дб .
![]()
Переходный процесс скорректированной системы:

ЛЧХ контура скорости :
Постоянные времени определим из графиков ЛЧХ.
T= 1,11с; k=5.
Из рисунка видно что перерегулирование системы σ=2,7%, а время переходного процесса tп=4,3с.
Техническая реализация данного звена:

Произведём расчёт параметров звена.
Т=С*R2
k=R2/R1
Подставляя значения постоянных времени определяем параметры звена:
R1=20 кОм R2=29кОм C=95 мкФ.