

В) Короткозамкнутые двигатели.
Короткозамкнутые двигатели обычно пускаются в ход путем непосредственного включения их в сеть. Такие двигатели выполняются, как отмечалось, с роторной обмоткой в виде беличьей клетки.
Круглые пазы на роторе и соответствующие им круглые медные стержни в настоящее время применяются только для малых машин, причем и для таких машин более часто применяется алюминиевая клетка, полученная путем заливки пазов расплавленным алюминием. В малых машинах сопротивление r2 получается относительно большим, поэтому здесь и при круглых пазах создается достаточный момент Мнач. Что касается начального пускового тока, то в случае малых машин он обычно не имеет большого значения.
Для короткозамкнутых машин с алюминиевой
обмоткой мощностью свыше 2
![]() 3
кВт пазам ротора придается форма,
показанная на рис.
3-20,б,
в
и г,
причем при больших мощностях (> 20
3
кВт пазам ротора придается форма,
показанная на рис.
3-20,б,
в
и г,
причем при больших мощностях (> 20
![]() 30
кВт) применяются тем более глубокие
пазы, чем больше мощность машины.
30
кВт) применяются тем более глубокие
пазы, чем больше мощность машины.
При мощности свыше 120—150 кВт на роторе
применяются узкие глубокие пазы (при
ширине паза 5—6 мм и глубине его до 50
![]() 55
мм). В них закладываются узкие высокие
медные стержни. Такой паз вместе с
заложенным в него стержнем показан на
рис.
3-61. Здесь же приведена примерная
картина поля пазового рассеяния.
55
мм). В них закладываются узкие высокие
медные стержни. Такой паз вместе с
заложенным в него стержнем показан на
рис.
3-61. Здесь же приведена примерная
картина поля пазового рассеяния.
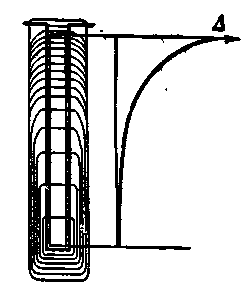
Рис. 3-61. Глубокий паз с узким высоким стержнем и распределение плотности тока по высоте стержня.
Применение глубоких пазов на роторе улучшает пусковые характеристики короткозамкнутых двигателей, что вытекает из следующих рассуждений.
Представим себе, что стержень по высоте разделен на большое число слоев. Нижние слои сцепляются с большим числом индукционных линий, чем верхние слои. Поэтому их индуктивное сопротивление больше, чем верхних слоев. При большой частоте тока /2 = sf1 (например, при s = 1) индуктивное сопротивление отдельных слоев значительно больше их активного сопротивления, вследствие чего распределение тока по слоям будет определяться в основном их индуктивными сопротивлениями.
На рис.
3-61 справа показано примерное
распределение плотности тока
![]() (имеется
в виду действующее значение тока) по
сечению стержня при f2
= fi. Мы
видим, что ток в стержне вытесняется к
открытию паза. Площадь сечения его
используется не полностью. Вследствие
этого увеличивается активное сопротивление
обмотки r2, что
приводит к повышению начального пускового
момента. Начальный пусковой ток при
этом уменьшается, но сравнительно мало,
так как из-за вытеснения тока в стержне
несколько уменьшается х2.
Уменьшение
(имеется
в виду действующее значение тока) по
сечению стержня при f2
= fi. Мы
видим, что ток в стержне вытесняется к
открытию паза. Площадь сечения его
используется не полностью. Вследствие
этого увеличивается активное сопротивление
обмотки r2, что
приводит к повышению начального пускового
момента. Начальный пусковой ток при
этом уменьшается, но сравнительно мало,
так как из-за вытеснения тока в стержне
несколько уменьшается х2.
Уменьшение
![]() при
больших скольжениях вызвано тем, что
площадь, через которую проходят трубки
поля пазового рассеяния, становится
меньше (они в основном проходят, как
показано на рис.
3-61, в верхней части паза); при
этом уменьшается магнитная проводимость
для них и, следовательно, индуктивность
рассеяния Lσ2.
при
больших скольжениях вызвано тем, что
площадь, через которую проходят трубки
поля пазового рассеяния, становится
меньше (они в основном проходят, как
показано на рис.
3-61, в верхней части паза); при
этом уменьшается магнитная проводимость
для них и, следовательно, индуктивность
рассеяния Lσ2.
По мере возрастания частоты вращения частота f2 уменьшается и при номинальной частоте вращения имеет небольшое значение. Ток при этом практически распределяется равномерно по всему сечению стержня, так как его распределение теперь будет определяться в основном активными сопротивлениями отдельных слоев, на которые мы мысленно подразделили стержень. Следовательно, f2 автоматически уменьшится.
На рис.
3-62 представлены пусковые
характеристики
![]() и
и
![]() для
короткозамкнутого двигателя с глубокими
пазами на роторе (здесь вместо абсолютных
значений тока статора I
и вращающего момента М взяты их
отношения к номинальным значениям Iн
и Мн, что является более
показательным).
для
короткозамкнутого двигателя с глубокими
пазами на роторе (здесь вместо абсолютных
значений тока статора I
и вращающего момента М взяты их
отношения к номинальным значениям Iн
и Мн, что является более
показательным).

Рис. 3-62. Пусковые характеристики короткозамкнутых двигателей. 1-с глубокими пазами, 2—с двойной клеткой.
Для таких двигателей обычно получают
![]() при
при
![]() .
.
При менее глубоких пазах, которые применяются при алюминиевой клетке для двигателей небольшой и средней мощности (до 100 кВт) эти отношения составляют:
![]() при
при
![]() .
.
В последние годы для короткозамкнутых роторов применяются пазы в виде представленных на рис. 3-63.

Рис. 3-63. Пазы короткозамкнутого ротора.
Здесь также получается увеличение r2 из-за вытеснения тока, но при меньшей глубине паза, чем в случае глубоких пазов по рис. 3-61.
М.О. Доливо-Добровольский впервые применил для короткозамкнутых двигателей двойную клетку на роторе (1893 г.). Применяемые при этом пазы показаны на рис. 3-64.
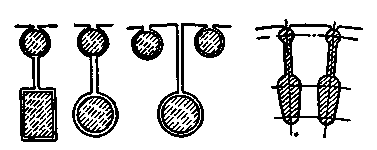
Рис. 3-64. Пазы ротора с двойной клеткой
В верхних пазах помещают стержни повышенного активного сопротивления, в нижних пазах — стержни с относительно малым активным сопротивлением.
Индуктивное сопротивление нижних стержней получается в несколько раз больше индуктивного сопротивления верхних стержней в соответствии с различием потокосцеплений тех и других. Потокосцепление нижних стержней определяется главным образом размерами прореза между верхней и нижней частями паза. Так как распределение тока между стержнями при больших скольжениях зависит в основном от их индуктивных сопротивлений, значительно превышающих их активные сопротивления, то ток вытесняется в верхние стержни, образующие клетку, называемую пусковой
При малых скольжениях распределение тока будет зависеть в основном от активных сопротивлений клеток. Ток при этом будет проходить главным образом по нижней клетке, которая называется рабочей.
При пуске, когда ток проходит главным образом по верхним стержням, они сильно нагреваются. Чтобы нагрев верхних стержней за время пуска не получился чрезмерным, их выполняют из латуни или бронзы, чем достигается увеличение теплоемкости стержней вследствие увеличения их веса при одновременном увеличении их активного сопротивления (по сравнению с медными стержнями).
Неодинаковое нагревание верхних и нижних стержней при пуске приводит к неодинаковому их удлинению. Поэтому для двигателей с большой длиной ротора приходится применять отдельные короткозамыкающие кольца для верхних и нижних стержней (рис 3-65; см также рис 3-126).

Рис 3-65. Ротор с двойной клеткой.
При выполнении двойной клетки из алюминия применяются пазы формы, показанной на рис 3-64 справа. На торцах обе клетки в этом случае имеют общие короткозамыкающие кольца.
Двигатели с двойной клеткой на роторе позволяют получить лучшие пусковые характеристики (рис. 3-62), чем двигатели с глубокими пазами на роторе, что достигается путем выбора надлежащих соотношений между параметрами верхней и нижней клеток. Поэтому в случае необходимости иметь короткозамкнутый двигатель с повышенным пусковым моментом при относительно небольшом пусковом токе его выполняют с двойной клеткой на роторе.
Короткозамкнутые двигатели иногда пускаются для ограничения пускового тока при пониженном напряжении. Для этой цели в цепь статора на время пуска включают активное сопротивление, реактор или автотрансформатор (§ 4-8,д).
Применяется также пуск при переключении обмотки статора со звезды на треугольник (рис. 3-66), если при данном напряжении сети она должна быть соединена в треугольник.

Рис. 3-66. Схема пуска короткозамкнутого двигателя при переключении обмотки статора со звезды на треугольник.
Во время пуска она соединяется звездой,
а по окончании разбега переключается
на треугольник. Следовательно, напряжение,
приходящееся на фазу при пуске, будет
в
![]() раз
меньше, чем при работе.
раз
меньше, чем при работе.
При этом (если считать параметры двигателя
постоянными) начальный пусковой фазный
ток уменьшается также в
![]() раз,
а линейный ток — в 3 раза (в действительности
вследствие уменьшения при больших токах
x1 и x2,
вызванного насыщением коронок зубцов
полями рассеяния, уменьшение тока
получается больше чем в 3 раза).
раз,
а линейный ток — в 3 раза (в действительности
вследствие уменьшения при больших токах
x1 и x2,
вызванного насыщением коронок зубцов
полями рассеяния, уменьшение тока
получается больше чем в 3 раза).
При понижении напряжения, приложенного к обмотке статора, заметно уменьшается начальный пусковой момент, пропорциональный квадрату первичного напряжения. Поэтому пуск при пониженном напряжении применяется только в тех случаях, где не требуется большой начальный момент (например, для электропривода к вентилятору).
Многие мощные сети, имеющиеся на заводах и электрических станциях Советского Союза, допускают непосредственное включение короткозамкнутых двигателей больших мощностей (на сотни киловатт).
Благодаря сравнительно небольшой стоимости, простоте конструкции, большой надежности в работе и удобству в обслуживании короткозамкнутые двигатели получили значительно большее распространение, чем двигатели с контактными кольцами.
Короткозамкнутые двигатели мощностью примерно до 100—125 кВт обычно выполняются со скошенными пазами ротора или статора (приблизительно на пазовое деление статора). При этом уменьшаются «паразитные моменты», действующие на ротор и статор машины. Они создаются высшими гармониками полей статора и ротора, в том числе гармониками полей, обусловленными неравномерностью воздушного зазора из-за наличия пазов. При неправильно выбранном числе пазов ротора «паразитные моменты» могут вызвать заметное ослабление пускового момента и шум как при разбеге двигателя, так и при его работе.
3-20. Регулирование скорости вращения
Асинхронные двигатели обычно применяются для электроприводов, которые работают с постоянной частотой вращения. Но иногда они применяются для регулируемых электроприводов. Рассмотрим возможные способы регулирования частоты вращения.
1. На практике иногда для регулирования частоты вращения асинхронного двигателя используется реостат в цепи ротора, имеющего обмотку, присоединенную к контактным кольцам.
Увеличение активного сопротивления
цепи ротора приводит к увеличению
скольжения и, следовательно, к уменьшению
частоты вращения двигателя, что видно
из кривых M = f(s)
при различных (![]() ),
представленных на рис.
3-60. Здесь при
),
представленных на рис.
3-60. Здесь при
![]() (соответствует
работе электропривода с подъемным
краном) точки пересечения кривой
(соответствует
работе электропривода с подъемным
краном) точки пересечения кривой
![]() с
указанными кривыми определяют скольжения
при различных значениях (
с
указанными кривыми определяют скольжения
при различных значениях (![]() ).
Регулирование здесь возможно в широких
пределах, причем плавность регулирования,
очевидно, зависит от числа ступеней
реостата.
).
Регулирование здесь возможно в широких
пределах, причем плавность регулирования,
очевидно, зависит от числа ступеней
реостата.
Указанный способ регулирования неэкономичен, так как он связан с непроизводительной затратой энергии в реостате. Действительно, согласно (3-69) получаем:
![]() .
.
Отсюда видно, что увеличение скольжения
s при М = const
приводит к увеличению электрических
потерь в роторной цепи. Если, например,
s увеличивается при
М = const вследствие
введения в роторную цепь сопротивления
![]() от
0,02 до 0,5, что соответствует уменьшению
частоты вращения приблизительно вдвое,
то почти половина мощности Рэм
непроизводительно теряется в реостате.
от
0,02 до 0,5, что соответствует уменьшению
частоты вращения приблизительно вдвое,
то почти половина мощности Рэм
непроизводительно теряется в реостате.
При регулировании частоты вращения двигателя при помощи реостата в цепи ротора следует иметь в виду, что его механическая характеристика (рис. 3-67) может получиться резко падающей, недопустимой, например, для электропривода к токарному станку.

Рис. 3-67. Механические характеристики
n2 = f
(M) двигателя с
контактными кольцами при сопротивлении
![]() =
0 и при
=
0 и при
![]() >0.
>0.
Для целей регулирования не следует применять пусковые реостаты, так как они предназначаются для кратковременной нагрузки. Регулировочные реостаты должны иметь большие размеры, чтобы получилась достаточная поверхность охлаждения для рассеяния тепла, образующегося в реостате.
2. Частоту вращения асинхронного двигателя можно регулировать также путем изменения напряжения U1 на зажимах статора. Однако такой способ регулирования при малом сопротивлении роторной цепи позволяет изменять частоту вращения лишь в небольших пределах, что следует из рис. 3-68, где сплошные кривые представляют собой зависимости M = f(s)при различных напряжениях U1 и при rд = 0.

Рис. 3-68. Регулирование частоты вращения путем изменения напряжения U1.
Можно расширить пределы регулирования
путем изменения U1,
включив в роторную цепь добавочное
сопротивление
![]() (пунктирные
кривые на рис.
3-68).
(пунктирные
кривые на рис.
3-68).
Изменение напряжения U1 производится при помощи регулировочных трансформаторов, реактивных катушек с выдвижным сердечником, переменных активных сопротивлений, включенных в цепь статора, а также при помощи магнитных усилителей.
3. В относительно редких случаях
регулирование частоты вращения
осуществляется путем изменения частоты
f1, тока, подводимого
к двигателю. При этом изменяется частота
вращения поля
![]() ,
а следовательно, и ротора. Такой способ
регулирования требует наличия отдельного
генератора переменного тока с регулируемым
первичным двигателем.
,
а следовательно, и ротора. Такой способ
регулирования требует наличия отдельного
генератора переменного тока с регулируемым
первичным двигателем.
4. На практике применяется также способ ступенчатого изменения частоты вращения путем изменения числа пар полюсов обмотки статора. Соответствующее переключение обмотки производится сравнительно просто, если нужно увеличить или уменьшить число пар полюсов вдвое. В этом случае каждая фаза обмотки статора делится на две одинаковые части, которые можно включать последовательно или параллельно.
На рис. 3-69 показана принципиальная схема такой обмотки, из которой видно, что при последовательном соединении обеих половин фазы получается число полюсов, в 2 раза большее, чем при параллельном.
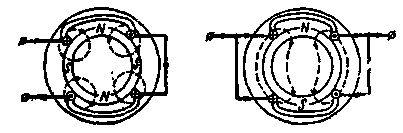
Рис. 3-69. Изменение числа пар полюсов обмотки статора в отношении 2 : 1.
При обмотке статора, переключаемой на различные числа пар полюсов, как правило, применяется короткозамкнутый ротор с беличьей клеткой. Если ротор выполняется с контактными кольцами, то его обмотка также должна переключаться на те же числа пар полюсов, что требует устройства большого количества контактных колец и удорожает двигатель.
Для получения большего числа ступеней скорости на статоре помещают обычно две обмотки, причем одна или каждая из них делается переключаемой на числа пар полюсов в отношении 2 : 1. В этом случае можно получить три или четыре ступени скорости, например:
3000 : 1500 : 1000
или
3000 : 1 500 : 1 000 : 500 об/мин.
Асинхронные двигатели с несколькими ступенями частоты вращения называются многоскоростными. Они применяются в электроприводах к вентиляторам и металлорежущим станкам, где позволяют упростить «коробку скоростей» или совсем от нее освободиться. Достоинством многоскоростного двигателя при применении его, например, для токарного станка является то, что при изменении момента нагрузки он работает на каждой ступени частоты вращения при незначительном ее изменении, как и обычный асинхронный двигатель.
Сказанное подтверждают механические характеристики n2 = f (M) многоскоростного двигателя, приведенные на рис. 3-70.

Рис. 3-70. Механические характеристики n2 = f (M) многоскоростного двигателя для двух ступеней скорости.
К недостаткам многоскоростных двигателей нужно отнести их увеличенные размеры по сравнению с нормальными двигателями и вследствие этого более высокую стоимость.
Другие способы регулирования частоты вращения асинхронного двигателя здесь не рассматриваются, так как они редко применяются на практике.
3-21. Работа трехфазного двигателя при неноминальных условиях
Условия работы двигателя могут отличаться от номинальных, т. е. от тех условий, для которых он предназначен.
На практике напряжение на его зажимах
часто отличается от номинального: U1
![]() U1н.
Могут быть случаи, когда f1
U1н.
Могут быть случаи, когда f1
![]() f1н.
Иногда к двигателю подводятся
несимметричные напряжения, если,
например, нагрузка сети, к которой он
приключен, распределена по фазам
неравномерно. Напряжения на зажимах
двигателя могут быть также несинусоидальными,
если большую часть нагрузки сети
составляют нелинейные сопротивления,
например, выпрямители. Поэтому исследование
работы двигателя при указанных
неноминальных условиях имеет важное
практическое значение.
f1н.
Иногда к двигателю подводятся
несимметричные напряжения, если,
например, нагрузка сети, к которой он
приключен, распределена по фазам
неравномерно. Напряжения на зажимах
двигателя могут быть также несинусоидальными,
если большую часть нагрузки сети
составляют нелинейные сопротивления,
например, выпрямители. Поэтому исследование
работы двигателя при указанных
неноминальных условиях имеет важное
практическое значение.
Мы здесь рассмотрим также работу двигателя при неравных сопротивлениях фаз его роторной обмотки, что может быть вызвано ухудшением переходных контактов между кольцами и щетками или дефектами, допущенными при изготовлении короткозамкнутой обмотки ротора (например, плохие контакты или разрывы между стержнями и короткозамыкающими кольцами, пустоты в стержнях при заливке пазов алюминием).
3-21.1. Работа при U1U1н
Отклонение напряжения U1 от номинального U1н на ±5% считается допустимым. При этом двигатель обычно может нести номинальную нагрузку на валу. При больших отклонениях напряжения нагрузка на валу двигателя, как правило, должна быть снижена.
Работа двигателя при U1
![]() U1н
может быть исследована путем сопоставления
его рабочих характеристик при U1
и при U1н. Прежде
чем переходить к такому сопоставлению,
рассмотрим с качественной стороны, как
изменятся характеристики двигателя
при U1 > U1н
и при U1 < U1н.
U1н
может быть исследована путем сопоставления
его рабочих характеристик при U1
и при U1н. Прежде
чем переходить к такому сопоставлению,
рассмотрим с качественной стороны, как
изменятся характеристики двигателя
при U1 > U1н
и при U1 < U1н.
Повышение напряжения сверх номинального сравнительно редкое явление на практике, но в отдельных случаях оно может иметь место, например, при неисправностях регулятора напряжения генератора. При этом в машине должен увеличиться магнитный поток Ф, создающий э.д.с. E1, почти полностью уравновешивающую приложенное напряжение U1. Увеличение потока вызовет увеличение намагничивающего тока, которое может быть значительным из-за чрезмерного насыщения стальных участков магнитной цепи машины. В результате получим ухудшение cosφ1 и увеличение тока статора. Поэтому при U1 > U1н возрастут не только потери в стали, но и электрические потери в обмотке статора, что может увеличить ее нагрев сверх допустимого.
Если U1 < U1н, то вследствие уменьшения магнитного потока уменьшится намагничивающий ток, но возрастут активные составляющие токов ротора и статора В результате при номинальной нагрузке на валу токи ротора и статора будут больше номинальных. При этом усиливаются поля рассеяния, что повлечет за собой увеличение реактивной составляющей тока статора. Таким образом, и здесь мы будем иметь при номинальной нагрузке на валу ухудшение cosφ1 и увеличение токов статора и ротора сверх допустимого. Следует также иметь в виду, что при U1 <U1н может заметно снизиться максимальный момент двигателя Мм, пропорциональный квадрату напряжения (§ 3-13,в).
При более подробном исследовании, когда нужно дать количественную оценку изменениям I1 c cosφ1, η, s при отклонении U1 от U1н, следует обратиться, как указывалось, к сопоставлению рабочих характеристик при U1 и при U1н.
Рассмотрим характеристики при U1
<U1н. Они могут
быть построены по круговой диаграмме
или расчетным путем (§
3-18). При этом параметры r1,
х1,
![]() и
и
![]() остаются
без изменения, а для определения тока
холостого хода нужно произвести опыт
холостого хода при U1
или выполнить расчет магнитной цепи и
потерь в стали при E1
остаются
без изменения, а для определения тока
холостого хода нужно произвести опыт
холостого хода при U1
или выполнить расчет магнитной цепи и
потерь в стали при E1![]() 0,97U1.
0,97U1.
На рис. 3-71 представлены рабочие характеристики двигателя на 10 кВт при номинальном фазном напряжении U1н = 220 В (сплошные кривые) и при фазном напряжении U1 = 127 В (пунктирные кривые). По оси ординат здесь отложены фазные токи.

Рис. 3-71. Рабочие характеристики двигателя при U1н = 220 В (сплошные кривые) и при U1 = 127 В (пунктирные кривые).
Из сопоставления характеристик мы
видим, что при малых нагрузках выгодно
работать при пониженном напряжении.
Этим иногда пользуются на практике для
улучшения соsφ1 и η
двигателя: если его номинальное фазное
напряжение равно напряжению сети, то
при малых нагрузках [примерно при Р2
< (0,40
![]() 0,45)Р2н]
его обмотку статора переключают с
треугольника на звезду (для такого
случая построены кривые на рис.
3-71).
0,45)Р2н]
его обмотку статора переключают с
треугольника на звезду (для такого
случая построены кривые на рис.
3-71).
3-21.2. Работа при f1f1н
В большинстве случаев частота сети достаточно точно поддерживается равной стандартной частоте 50 Гц. Лишь иногда, обычно в аварийных случаях, могут быть заметные отклонения fi от f1н. Если они не превышают примерно ±5%, то работа двигателя мало ухудшается; поэтому такие отклонения обычно считаются допустимыми.
При больших отклонениях fi
от fiн
приходится изменять напряжение на
зажимах двигателя: например при
регулировании его частоты вращения
путем изменения частоты f1.
Довольно часто при этом напряжение
изменяют пропорционально частоте, чтобы
поток Ф оставался приблизительно
постоянным (согласно уравнению U
![]() E1
E1
![]() f1Ф).
f1Ф).
Исследование работы двигателя
при f1
![]() fiн
может быть проведено при помощи круговой
диаграммы или расчетным путем. Здесь
нужно учитывать, что индуктивные
сопротивления х12,
х1
и
fiн
может быть проведено при помощи круговой
диаграммы или расчетным путем. Здесь
нужно учитывать, что индуктивные
сопротивления х12,
х1
и
![]() изменяются
пропорционально fi.
Если при изменении fi
напряжение изменяется непропорционально
частоте, когда, следовательно, поток Ф
не остается постоянным, то при определении
х12
должно быть учтено не только изменение
частоты, но и изменение насыщения машины.
Если необходимо произвести исследование
двигателя при частоте fi,
значительно меньшей, чем fiн,
то следует обратиться к точной круговой
диаграмме, построенной с учетом γ1
(см. §
3-17).
изменяются
пропорционально fi.
Если при изменении fi
напряжение изменяется непропорционально
частоте, когда, следовательно, поток Ф
не остается постоянным, то при определении
х12
должно быть учтено не только изменение
частоты, но и изменение насыщения машины.
Если необходимо произвести исследование
двигателя при частоте fi,
значительно меньшей, чем fiн,
то следует обратиться к точной круговой
диаграмме, построенной с учетом γ1
(см. §
3-17).
3-21.3. Работа при несимметричных напряжениях
Работа трехфазного двигателя даже при небольшой несимметрии напряжений на его зажимах может привести к недопустимому нагреванию его обмоток, если он имеет на валу номинальную нагрузку или близкую к ней.
Исследование такой работы производится
при помощи метода симметричных
составляющих. Заданную систему напряжений
![]()
![]()
![]() мы
должны заменить двумя симметричными
системами: напряжениями прямой
последовательности
мы
должны заменить двумя симметричными
системами: напряжениями прямой
последовательности
![]()
![]()
![]() и
напряжениями обратной последовательности
и
напряжениями обратной последовательности
![]()
![]()
![]() .
В обычных случаях заданная система
напряжений не имеет составляющих нулевой
последовательности
.
В обычных случаях заданная система
напряжений не имеет составляющих нулевой
последовательности
![]() из-за
отсутствия нулевого провода. Тогда
определение U1
и U2 может быть
произведено по заданным абсолютным
значениям напряжений
из-за
отсутствия нулевого провода. Тогда
определение U1
и U2 может быть
произведено по заданным абсолютным
значениям напряжений
![]()
![]()
![]() ,
векторы которых при
,
векторы которых при
![]() =
0 образуют замкнутый треугольник.
=
0 образуют замкнутый треугольник.
Аналогично уравнениям для токов
![]() и
и
![]() (2-146)
и (2-147)
мы можем написать уравнения для
(2-146)
и (2-147)
мы можем написать уравнения для
![]() и
и
![]() :
:
 (3-187)
(3-187)
Согласно этим уравнениям на рис.
3-72 построена диаграмма для
определения
![]() и
и
![]() ,
из которой мы находим не только абсолютные
значения напряжений
,
из которой мы находим не только абсолютные
значения напряжений
![]() и
и
![]() ,
но и взаимный сдвиг их по фазе.
,
но и взаимный сдвиг их по фазе.

Рис. 3-72. Определение
![]() и
и
![]() при
при
![]()
![]()
![]() =
0.
=
0.
Критерием для оценки несимметрии
напряжений служит отношение
![]() ,
которое иногда называют коэффициентом
несимметрии. Значения
,
которое иногда называют коэффициентом
несимметрии. Значения
![]() и
и
![]() определяются
по рис.
3-72 или аналитически. При
аналитическом определении
определяются
по рис.
3-72 или аналитически. При
аналитическом определении
![]() и
и
![]() надо
заданные напряжения расположить в
следующем порядке: Ua
> Ub
> Uc
(в частном случае два напряжения из трех
могут быть равны между собой). Предварительно
находим:
надо
заданные напряжения расположить в
следующем порядке: Ua
> Ub
> Uc
(в частном случае два напряжения из трех
могут быть равны между собой). Предварительно
находим:
![]() ;
;
![]() .
.
Далее рассчитываем:
![]() ;
;
![]() .
.
После этого получим:
 ;
;
![]()
и отсюда модули симметричных составляющих:
![]() ;
;
![]() .
.
При симметричных обмотках статора и ротора мы можем считать, что обе системы напряжений U1 и U2, действуют независимо одна от другой При U1 > U2 ротор будет вращаться в сторону вращения поля, соответствующего напряжениям прямой последовательности U1. Будем это поле называть прямо вращающимся или прямым.
По отношению к напряжениям U1
машина будет работать в режиме двигателя
со скольжением
![]() По
круговой диаграмме или расчетным путем,
как указывалось ранее, мы можем найти
токи статора и ротора I1,
и
По
круговой диаграмме или расчетным путем,
как указывалось ранее, мы можем найти
токи статора и ротора I1,
и
![]() вращающий
момент М при любом скольжении s.
Токи I1, вызванные
напряжениями U1,
являются токами прямой последовательности.
вращающий
момент М при любом скольжении s.
Токи I1, вызванные
напряжениями U1,
являются токами прямой последовательности.
Поле, соответствующее напряжениям обратной последовательности U2 будет вращаться против вращения ротора. Будем его называть обратно вращающимся или обратным. По отношению к напряжениям U2 машина будет работать в режиме тормоза со скольжением
![]() .
.
Токи статора, вызванные напряжениями
U2, являются
токами обратной последовательности.
Обозначим их через I12.
Токи
![]() ,
наведенные в обмотке ротора обратным
полем, будут иметь частоту (2 — s)f1
При малом s эта частота
почти в 2 раза больше частоты тока
статора.
,
наведенные в обмотке ротора обратным
полем, будут иметь частоту (2 — s)f1
При малом s эта частота
почти в 2 раза больше частоты тока
статора.
3-21.3. Работа при несимметричных напряжениях
Токи I12 и
![]() можно
определить по упрощенной схеме замещения,
представленной на рис
3-73.
можно
определить по упрощенной схеме замещения,
представленной на рис
3-73.

Рис. 3-73. Приближенная схема для определения тока обратной последовательности.
Здесь мы пренебрегаем током синхронизма
и принимаем с1 = 1, что допустимо
при U2
U1. Сопротивления
![]() и
и
![]() являются
сопротивлениями роторной обмотки,
приведенными к статорной обмотке и
рассчитанными с учетом вытеснения тока.
Вытеснение тока здесь необходимо
учитывать, так как частота тока ротора
почти равна 2f1.
Для двигателей с глубокими пазами и с
двойной клеткой на роторе
являются
сопротивлениями роторной обмотки,
приведенными к статорной обмотке и
рассчитанными с учетом вытеснения тока.
Вытеснение тока здесь необходимо
учитывать, так как частота тока ротора
почти равна 2f1.
Для двигателей с глубокими пазами и с
двойной клеткой на роторе
![]() может
быть больше
может
быть больше
![]() (рассчитанного
без учёта вытеснения тока) в 5-6 раз. Для
фазного ротора, имеющего стержневую
двухслойную обмотку при высоте стержней
1 см и больше, также получается заметное
увеличение
(рассчитанного
без учёта вытеснения тока) в 5-6 раз. Для
фазного ротора, имеющего стержневую
двухслойную обмотку при высоте стержней
1 см и больше, также получается заметное
увеличение
![]() по
сравнению с
по
сравнению с
![]() .
.
Сопротивление схемы рис. 3-73 приблизительно равно сопротивлению короткого замыкания zк; следовательно, приближенно можем написать
![]() ,
(3-188)
,
(3-188)
где
![]() —
ток короткого замыкания при напряжении
U1н. Ранее
указывалось, что для нормальных двигателей
—
ток короткого замыкания при напряжении
U1н. Ранее
указывалось, что для нормальных двигателей
![]() ,
поэтому, учитывая (3-188),
получим:
,
поэтому, учитывая (3-188),
получим:
![]() .
(3-189)
.
(3-189)
Из (3-189)
следует, что ток обратной последовательности
может иметь большое значение: например,
даже при
![]() токи
I12 и
токи
I12 и
![]() будут
составлять 20
будут
составлять 20
![]() 30%
номинального тока I1н.
30%
номинального тока I1н.
Тормозящий момент М2,
соответствующий работе тормозом при
U2, в обычных
случаях несимметрии напряжений мал и
им можно пренебречь Действительно,
момент от обратного поля
![]() ;
момент от прямого поля
;
момент от прямого поля
![]() ,
следовательно
,
следовательно
![]() .
.
Мы видим, что при
![]() когда
когда
![]() ,
и при обычных скольжениях s
= 0,02
,
и при обычных скольжениях s
= 0,02
![]() 0,05,
соответствующих номинальной нагрузке
на валу, момент М2 не превышает
в худшем случае 0,02 М.
0,05,
соответствующих номинальной нагрузке
на валу, момент М2 не превышает
в худшем случае 0,02 М.
Таким образом, ухудшение условий работы
двигателя при несимметрии напряжений
на его зажимах получается в основном
из-за увеличения электрических потерь
в его обмотках. Потери в роторной обмотке
увеличиваются на
![]() ,
(так как частоты токов
,
(так как частоты токов
![]() и
и
![]() сильно
отличаются одна от другой, и поэтому мы
можем считать, что общие потери в роторной
обмотке равны
сильно
отличаются одна от другой, и поэтому мы
можем считать, что общие потери в роторной
обмотке равны
![]() .
Общие потери в статорной обмотке
увеличиваются на
.
Общие потери в статорной обмотке
увеличиваются на
![]() (так
как из общих уравнений метода симметричных
составляющих следует, что электрические
потери в трехфазной обмотке при наличии
в ней токов прямой и обратной
последовательностей равны
(так
как из общих уравнений метода симметричных
составляющих следует, что электрические
потери в трехфазной обмотке при наличии
в ней токов прямой и обратной
последовательностей равны
![]() ).
).
Приходится также считаться с тем, что в наихудшем случае в одной из фаз токи прямой и обратной последовательностей складывается арифметически (рис. 3-74). Нагревание ее в этом случае может быть чрезмерным.

Рис. 3-74. Определение токов фаз по их симметричным составляющим.
Отметим здесь, что асинхронный двигатель при его работе вхолостую или с нагрузкой создает выравнивающее действие на напряжения сети, к которой он подключен, т. е. уменьшает их несимметрию. Объясняется это тем, что распределение токов по фазам сети и обмотки статора будет соответствовать напряжениям фаз: больший ток будет поступать в ту фазу обмотки статора, к которой приложено большее напряжение. Выравнивающее действие трехфазного асинхронного двигателя на напряжения сети будет тем больше, чем меньше zк двигателя.
3-21.4. Работа при несинусоидальном напряжении
Если кривая напряжения сети, к которой подключен двигатель, имеет высшие гармоники, то действие каждой гармоники с частотой f = f1 можно рассматривать отдельно, так же как и действие основной (первой) гармоники При этом следует иметь в виду, что все индуктивные сопротивления и частота вращения поля при более высокой частоте ( > l) будут в раз больше, чем при основной частоте напряжения. Но число полюсов вращающегося поля, соответствующего -й гармонике напряжения, будет равно числу полюсов основного поля (здесь рассматриваются только основные пространственные гармоники н.с. и, следовательно, полей статора).
Скольжение ротора относительно поля, соответствующего -й гармонике напряжения,
![]() ,
,
где s — скольжение ротора относительно основного поля. При номинальном режиме работы
двигателя скольжение s
![]() .
Оно мало отличается от 1 (при
> 5), т. е. практически можно принять,
что двигатель по отношению к системе
напряжений с частотой f1,
находится в покое (s
.
Оно мало отличается от 1 (при
> 5), т. е. практически можно принять,
что двигатель по отношению к системе
напряжений с частотой f1,
находится в покое (s
![]() ).
).
Тогда добавочный ток, созданный этой системой напряжений,
![]() ,
,
где U
— v-я гармоника напряжения;
I1к
![]() —
ток короткого замыкания (xк
—
ток короткого замыкания (xк
![]() .
.
Ток статора I
и соответствующий ему ток ротора![]() вызовут
в обмотках машины электрические потери.
Созданный ими вращающий момент практически
ничтожен. Он приближенно равен:
вызовут
в обмотках машины электрические потери.
Созданный ими вращающий момент практически
ничтожен. Он приближенно равен:
![]() ,
,
где Мнач — начальный вращающий момент при U1н без учета насыщения от полей рассеяния и вытеснения тока в проводниках ротора. При учете вытеснения тока в проводниках ротора M будет больше главным образом из-за увеличения активного сопротивления обмотки ротора Но и в этом случае его значение очень мало.
Добавочные электрические потери от
токов Iν и
![]() в
обмотках машины равны:
в
обмотках машины равны:
![]() ,
,
где
![]() —
активное сопротивление обмотки ротора,
приведенное к обмотке статора и
учитывающее вытеснение тока при f2
—
активное сопротивление обмотки ротора,
приведенное к обмотке статора и
учитывающее вытеснение тока при f2
![]() f1.
Общие добавочные электрические потери
в обмотках машины получим, просуммировав
потери Pэ
от всех гармоник тока.
f1.
Общие добавочные электрические потери
в обмотках машины получим, просуммировав
потери Pэ
от всех гармоник тока.
Если кривая напряжения сети, к которой подключен двигатель, имеет высшие гармоники, то действие каждой гармоники с частотой f = f1 можно рассматривать отдельно, так же как и действие основной (первой) гармоники При этом следует иметь в виду, что все индуктивные сопротивления и частота вращения поля при более высокой частоте ( > l) будут в раз больше, чем при основной частоте напряжения. Но число полюсов вращающегося поля, соответствующего -й гармонике напряжения, будет равно числу полюсов основного поля (здесь рассматриваются только основные пространственные гармоники н.с. и, следовательно, полей статора).
Скольжение ротора относительно поля, соответствующего -й гармонике напряжения,
![]() ,
,
где s — скольжение ротора относительно основного поля. При номинальном режиме работы
двигателя скольжение s
![]() .
Оно мало отличается от 1 (при
> 5), т. е. практически можно принять,
что двигатель по отношению к системе
напряжений с частотой f1,
находится в покое (s
.
Оно мало отличается от 1 (при
> 5), т. е. практически можно принять,
что двигатель по отношению к системе
напряжений с частотой f1,
находится в покое (s
![]() ).
).
Тогда добавочный ток, созданный этой системой напряжений,
![]() ,
,
где U
— v-я гармоника напряжения;
I1к
![]() —
ток короткого замыкания (xк
—
ток короткого замыкания (xк
![]() .
.
Ток статора I
и соответствующий ему ток ротора![]() вызовут
в обмотках машины электрические потери.
Созданный ими вращающий момент практически
ничтожен. Он приближенно равен:
вызовут
в обмотках машины электрические потери.
Созданный ими вращающий момент практически
ничтожен. Он приближенно равен:
![]() ,
,
где Мнач — начальный вращающий момент при U1н без учета насыщения от полей рассеяния и вытеснения тока в проводниках ротора. При учете вытеснения тока в проводниках ротора M будет больше главным образом из-за увеличения активного сопротивления обмотки ротора Но и в этом случае его значение очень мало.
Добавочные электрические потери от
токов Iν и
![]() в
обмотках машины равны:
в
обмотках машины равны:
![]() ,
,
где
![]() —
активное сопротивление обмотки ротора,
приведенное к обмотке статора и
учитывающее вытеснение тока при f2
—
активное сопротивление обмотки ротора,
приведенное к обмотке статора и
учитывающее вытеснение тока при f2
![]() f1.
Общие добавочные электрические потери
в обмотках машины получим, просуммировав
потери Pэ
от всех гармоник тока.
f1.
Общие добавочные электрические потери
в обмотках машины получим, просуммировав
потери Pэ
от всех гармоник тока.
3-21.5. Работа при неравных сопротивлениях фаз ротора
При неравных сопротивлениях фаз ротора токи их также не равны между собой. Они образуют несимметричную систему, которую мы можем заменить двумя симметричными системами, имеющими взаимно обратное чередование фаз. Возможность такой замены подтверждается следующими рассуждениями.
Каждая фаза ротора создает пульсирующую н.с. Ее мы можем заменить двумя н.с., вращающимися в разные стороны с одинаковыми частотами (§ 3-4,а). Таким образом, при числе фаз ротора m2 мы получим m2 н.с., вращающихся в одну сторону, и m2 н.с., вращающихся в другую сторону. Суммируя отдельно те и другие, получим только две н.с., вращающиеся в разные стороны Такие же н.с. создадут токи прямой и обратной последовательностей, которыми мы заменили действительные токи фаз ротора.
В машине возникнут два вращающихся поля. Одно из них (основное) будет создаваться токами прямой последовательности ротора Iр1 и соответствующими им токами статора Iс1. Оно будет наводить в обмотке статора э.д.с. Ec1, почти равную при малых скольжениях приложенному к статору напряжению U1. Второе поле будет вызвано токами обратной последовательности ротора Iр2 и токами Iс2, наведенными им в обмотке статора.
При скольжении s ротора относительно первого (основного) поля его н.с. от токов прямой последовательности вращается относительно ротора в сторону его вращения с частотой sn1 соответственно частоте f2 = sf1. Токи ротора обратной последовательности, имеющие ту же частоту f2, создадут н.с., вращающуюся относительно ротора с той же частотой sn1, но в сторону, противоположную его вращению. Эти токи мы должны рассматривать как первичные. Соответствующее им поле вращается относительно статора с частотой
![]() .
(3-190)
.
(3-190)
Оно будет наводить в обмотке статора токи, имеющие частоту
![]() .
(3-191)
.
(3-191)
Эти токи будут замыкаться через сеть и налагаться на токи основной частоты f1.
При малом значении s частота f3 близка к частоте f1; например, при s = 0,01 и при f1 = 50 Гц получим f3= (1 - 2 0,01) 50 = 49 Гц.
При наложении токов частот f1 и f3 (так же как при наложении колебаний с мало различающимися частотами) получается резко выраженная картина биений, что приводит к колебаниям стрелки амперметра в цепи статора с частотой (f1 - f3). Такие колебания стрелки амперметра обычно указывают на неисправности цепи ротора. Если измерить их частоту, то можно, зная f1, найти f3 и, следовательно, определить по (3-191) скольжение двигателя s. При скольжении s, близком к 0,5, колебания стрелки амперметра в цепи статора также будут заметны, но частота их будет равна f3.
Рассмотрим вращающие моменты, которые создаются в машине при неравных сопротивлениях фаз ротора. Вначале рассмотрим момент, созданный обратным полем ротора. Для этого обратимся к рис. 3-75, где представлены статор и ротор машины, причем здесь условно (пунктиром и стрелками) показано поле северной полярности, вращающееся против вращения ротора с частотой sn1.

Рис. 3-75. К определению направления момента М2 от обратного поля.
По правилу правой руки найдем направление тока, наведенного этим полем в обмотке статора, а по правилу левой руки — направление электромагнитного момента М2, действующего на статор. На ротор действует такой же момент М2, но в обратную сторону.
На рис. 3-75, а и б видим, что при s > 0,5 момент M2 действует на ротор в направлении его вращения, а при s < 0.5 — в обратном направлении. При s = 0,5 обратное поле ротора относительно статора неподвижно и никаких токов в статорной обмотке не создает; при этом M2 = 0.
Момент М1, получающийся от
взаимодействия основного поля и токов
ротора прямой последовательности Iр1
при малом активном сопротивлении его
цепей может быть, как показывает анализ,
также отрицательным при s
![]() 0,5
из-за большого сдвига по фазе токов
относительно э.д.с.
0,5
из-за большого сдвига по фазе токов
относительно э.д.с.
Исследование работы трехфазного асинхронного двигателя при несимметрии фаз ротора будем проводить применительно к двигателю с контактными кольцами, имеющему в роторе трехфазную обмотку.

Рис. 3-76. Схема двигателя с неравными сопротивлениями фаз ротора.
Обратимся к рис. 3-76. Для роторных целей можем написать следующие уравнения напряжений:
 (1-192)
(1-192)
Заменим напряжения и токи их симметричными
составляющими, учтя при этом что
составляющие нулевой последовательности
отсутствуют. Обозначим составляющие
прямой и обратной последовательностей
в, фазе ротора а соответственно
через
![]()
![]() и
и
![]()
![]() При
этом будем считать, что все величины
ротора приведены к обмотке статора.
При
этом будем считать, что все величины
ротора приведены к обмотке статора.

Рис. 3-77. Схема замещения. соответствующая токам прямой последовательности ротора.
Решая полученную систему уравнений в
отношении
![]() и
и
![]() ,
получим:
,
получим:
 (3-193)
(3-193)
Теперь можем написать уравнения напряжений статора и ротора прямой последовательности:
 (3-194)
(3-194)
Уравнениям (3-194) соответствует схема замещения для напряжений и токов прямой последовательности, представленная на рис. 3-77.
Уравнения напряжений ротора и статора обратной последовательности имеют следующий вид:
 (3-195)
(3-195)
Мы считаем, что напряжение
![]() приложено
к обмотке ротора, вращающегося со
скольжением s
относительно основного поля. Рассматривая
работу машины, получающей питание со
стороны ротора (к обмотке ротора приложено
напряжение Uр2
переменной частоты sf1),
видим, что при s > 0,5
машина работает двигателем, так как
ротор при этом вращается медленнее, чем
обратное поле, а при s
< 0,5 машина работает генератором,
так как в этом случае ротор вращается
быстрее, чем обратное поле.
приложено
к обмотке ротора, вращающегося со
скольжением s
относительно основного поля. Рассматривая
работу машины, получающей питание со
стороны ротора (к обмотке ротора приложено
напряжение Uр2
переменной частоты sf1),
видим, что при s > 0,5
машина работает двигателем, так как
ротор при этом вращается медленнее, чем
обратное поле, а при s
< 0,5 машина работает генератором,
так как в этом случае ротор вращается
быстрее, чем обратное поле.
В последних трех уравнениях (3-195)
Ec2
— э. д. с статора, которая наводится в
его обмотке обратным полем, т. е. полем
токов Iр2 и Iс2,
при s = l.
При s
![]() 1
э. д. с. Eс2(1 - 2s)
имеет частоту (1 - 2s)f1
так же как и вызываемый ею ток Iс2.
1
э. д. с. Eс2(1 - 2s)
имеет частоту (1 - 2s)f1
так же как и вызываемый ею ток Iс2.
Уравнениям (3-195) соответствует схема замещения для напряжений и токов обратной последовательности, представленная на рис. 3-78.

Рис. 3-78. Схема замещения, соответствующая токам обратной последовательности ротора.
При помощи схем замещения и уравнений
(3-193)
можно составить формулы для определения
![]() ,
,
![]()
![]() ,
,
![]()
![]() и,
следовательно, М1 и M2.
Однако они получаются довольно громоздкими
и требуют кропотливых расчетов.
и,
следовательно, М1 и M2.
Однако они получаются довольно громоздкими
и требуют кропотливых расчетов.
Рассмотрим как имеющий большее практическое значение частный случай, когда Za = ∞, Zb = 0 и Zc=0, т. е. когда фаза а разомкнута, а фазы b и с замкнуты накоротко (рис. 3-79).
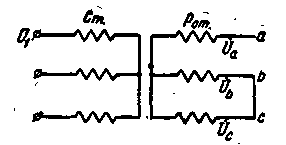
Рис. 3-79. Схема двигателя при одноосном включении обмотки ротора.
Для этого случая имеем:
![]()
![]()
![]() ;
;
![]() ;
;
следовательно,
![]() ;
(3-196)
;
(3-196)
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
следовательно,
![]() .
(3-197)
.
(3-197)
Так как
![]() и
и
![]() ,
то схемы, представленные на рис.
3-77 и 3-78,
могут быть объединены; тогда получится
схема, представленная на рис.
3-80.
,
то схемы, представленные на рис.
3-77 и 3-78,
могут быть объединены; тогда получится
схема, представленная на рис.
3-80.

Рис. 3-80. Схема замещения двигателя при одноосном включении обмотки ротора.
Этой объединенной схеме соответствует схема замещения агрегата, состоящего из двух идентичных машин, соединенных механически и электрически, как показано на рис. 3-81.

Рис. 3-81. Агрегат из двух асинхронных машин, соответствующий схеме рис. 3 80.
Здесь вторая машина соединена с первой машиной таким образом, чтобы момент, создаваемый ею при 0,5<s<l, был направлен в ту же сторону, что и момент первой машины. Приведённая схема будет приближенной для случая s = 1, так как при этом f3 = f1(1 - 2s) = -fi и обмотку статора только приближенно можно рассматривать короткозамкнутой по отношению к э.д.с. частоты f3 = -f1.
Расчет токов и моментов может быть произведен при помощи схемы на рис. 3-80. Однако практически достаточно точные результаты получаются при расчетах по упрощенной схеме, представленной на рис. 3-82.

Рис. 3-82. Упрощенная схема замещения двигателя при одноосном включении обмотки ротора.
Расчетные формулы будем составлять при помощи этой схемы (потери в стали статора, которые не учитывались в представленных схемах замещения, могут быть учтены при расчете электромагнитных моментов).
Сначала по схеме на рис.
3-82 найдем полное сопротивление
Z1 определяющее
ток
![]() ;
;
 ,
(3-198)
,
(3-198)
где
 (3-199)
(3-199)
[последний член правой части при s = 0,5 paвен нулю, в чем можно убедиться, умножив числитель и знаменатель на (1 - 2s)];
 (3-200)
(3-200)
[последний член правой части при s = 0,5 равен х12, что получим, если умножим числитель и знаменатель на (1 - 2s)2]. Значения А и В при s = 0,5 можно найти непосредственно из схемы замещения на рис. 3-82. Они, очевидно, будут такими же, как и найденные по (3-199) и (3-200), с учетом того, что отмечено в квадратных скобках.
Теперь можем определить модуль тока ротора:
 .
(3-201)
.
(3-201)
Действительный ток ротора в его замкнутых
фазах равен
![]() .
.
Вращающий момент от взаимодействия основного поля и токов ротора Ip1 определяется по следующей формуле, синхронных Bт:
М1 = m1![]() .
(3-202)
.
(3-202)
Для определения модуля тока Iс2 согласно схеме на рис. 3-82 можем написать следующее уравнение:
 ;
;
отсюда
 (3-203)
(3-203)
Вращающий момент от взаимодействия обратного поля и токов статора Iс2 определяется по формуле, синхронных ваттах,
![]() .
(3-204)
.
(3-204)
Результирующий момент, развиваемый машиной,
Mрез = M1 + M2. (3-205)
По приведенным выше формулам рассчитаны кривые M1, М2, Mрез = f(s), а также кривые Ip1, Ic2 = f(s) для двигателя с контактными кольцами на 250 кВт, имеющего параметры в относительных единицах (д.е.): r1 = 0,0173; r'2 = 0,021; x1 = 0,104; x'2 = 0,092; x12 = 4. Они представлены на рис. 3-83 и 3-84.

Рис. 3-83. Кривые моментов при одноосном включении обмотки ротора (r'2 0,02 д. е.): M1 (от основного поля); М2 (от обратного поля); Мрез = М1+M2; М (при нормальном включении обмотки ротора).

Рис. 3-84. Кривые токов при одноосном
включении обмотки ротора (r'2
0,02 д.е.): Iр1=
Iр2 — токи прямой
и обратной последовательностей
(действительный ток ротора равен
![]() );
Iс2 — ток в
обмотке статора, наведенный обратным
полем (ток в статоре Iс1,
в долях единицы мало отличается от тока
Iр1, д.е.).
);
Iс2 — ток в
обмотке статора, наведенный обратным
полем (ток в статоре Iс1,
в долях единицы мало отличается от тока
Iр1, д.е.).
На рис. 3-83 также показана для сравнения кривая M = f(s) того же двигателя при нормальном включении обмотки ротора. На рис. 3-85 представлены кривые моментов того же двигателя, но при r'2 = 20·0,021 = 0,42 д.е.

Рис. 3-85. Кривые моментов при одноосном включении обмотки ротора (r'2 больше нормального значения в 20 раз: r'2 = 20·0,021 = 0,42 д.е.).
Кривые рис. 3-83 показывают, что двигатель имеет две области устойчивой работы при s 0,5 и при s 0. При пуске в ход, даже вхолостую, двигатель не может дойти до нормальной частоты. Он будет «застревать» на частоте вращения, близкой к полусинхронной. Это явление «застревания» на частоте, близкой к полусинхронной, называется явлением одноосного включения обмотки ротора [или явлением Гёргеса (Görges), впервые его исследовавшего].
При увеличении r'2 можно получить результирующий момент Mрез положительным при всех значениях скольжения в пределах от 1 до 0 (рис. 3-85). Однако и в этом случае получается резкое снижение Mрез при s = 0,5, так как при таком скольжении обратное поле ротора обусловливает значительное увеличение индуктивного сопротивления вторичной цепи машины и резкое снижение токов ротора и статора [см. (3-200) и (3-201) при s = 0,5, а также рис. 3-84].
[Аналогичное явление наблюдается при
асинхронном пуске в ход синхронного
двигателя (см. §
4-8), не имеющего пусковой
(успокоительной) обмотки. Если такой
двигатель пустить в ход при замкнутой
накоротко обмотке возбуждения, то он
застревает на скорости, близкой к
полусинхронной. При пуске синхронного
двигателя в ход с обмоткой возбуждения,
замкнутой на большое активное сопротивление
(в 8
![]() 15
раз большее сопротивления самой обмотки
возбуждения), застревания при частоте
вращения, близкой к полусинхронной,
может не произойти, если двигатель
пускается вхолостую или с малой нагрузкой
на валу. Условия образования момента
вблизи s = 0,5 в синхронном
двигателе более благоприятны, чем в
асинхронном двигателе, так как его
сопротивление взаимной индукции xad
заметно меньше (обычно в 3 — 5 раз), чем
то же сопротивление х12
асинхронного двигателя, а от этого
сопротивления в основном зависит ток
Ip1
и, следовательно, Мрез при s
15
раз большее сопротивления самой обмотки
возбуждения), застревания при частоте
вращения, близкой к полусинхронной,
может не произойти, если двигатель
пускается вхолостую или с малой нагрузкой
на валу. Условия образования момента
вблизи s = 0,5 в синхронном
двигателе более благоприятны, чем в
асинхронном двигателе, так как его
сопротивление взаимной индукции xad
заметно меньше (обычно в 3 — 5 раз), чем
то же сопротивление х12
асинхронного двигателя, а от этого
сопротивления в основном зависит ток
Ip1
и, следовательно, Мрез при s
![]() 0,5].
0,5].
3-22. Однофазные асинхронные двигатели
3-22.1. Однофазные асинхронные двигатели. Общие сведения
Как отмечалось, однофазные асинхронные двигатели в настоящее время выполняются главным образом как малые машины на мощности, редко превышающие 0,5 кBт.
Статор их имеет однофазную обмотку, которую обычно получают из трехфазной, соединенной в звезду, при использовании только двух ее фаз. Ротор снабжается короткозамкнутой обмоткой в виде беличьей клетки.
Если обмотку статора питать однофазным переменным током, то она создаст переменную (пульсирующую) н. . При неподвижном роторе в машине возникнет при этом переменное (пульсирующее) поле. Оно будет наводить в обмотке ротора токи, как во вторичной обмотке трансформатора. На рис. 3-86 показаны направления токов в проводниках короткозамкнутого ротора при наличии пульсирующего поля.

Рис. 3-86. Токи в проводниках роторной обмотки однофазного двигателя при неподвижном роторе.
Очевидно, результирующий момент, действующий на ротор, будет равен нулю, так как электромагнитные силы от взаимодействия поля и токов в обмотке ротора на ее правой и левой половинах будут равны и противоположны.
Отсутствие начального вращающего момента является характерной особенностью однофазного двигателя при указанной схеме соединения. Следовательно, он сам не может тронуться с места. Однако, если посредством посторонней силы раскрутить ротор, то двигатель в дальнейшем будет вращаться самостоятельно и может быть нагружен.
Подобные явления можно наблюдать у трехфазного двигателя при обрыве одного из питающих проводов. Если провод оборван у неподвижного двигателя, то он при пуске не будет создавать вращающий момент и не тронется с места. Если же провод оборван у вращающегося трехфазного двигателя, то последний будет продолжать работать как однофазный. Но мощность его при этом должна быть снижена до 50 — 55% от номинальной.
Режим работы трехфазного двигателя в качестве однофазного не может быть допущен при мощности на его валу, близкой к номинальной, так как его обмотки из-за увеличения токов в них при таком режиме за короткое время чрезмерно нагреются.
Для объяснения указанных явлений заменим переменную пульсирующую по одной оси н.с. статора двумя н.с., вращающимися в разные стороны с синхронной частотой и имеющими амплитуды, равные половине амплитуды пульсирующей н.с. (§ 3-4,а; рис. 3-26).
При неподвижном роторе обе н.с. с равными амплитудами вращаются относительно ротора с одной и той же синхронной частотой. Поля, вызванные ими, также будут иметь одинаковые амплитуды. Они будут наводить в обмотке ротора одинаковые токи. Поэтому вращающие моменты, получающиеся от взаимодействия полей и наведенных ими токов, будут равны между собой. Так как они действуют в противоположные стороны, то результирующий момент равен нулю. Следовательно, ротор самостоятельно не может прийти во вращение. Если же, как указывалось, каким-либо способом привести его во вращение в любом направлении, то в этом направлении он будет вращаться самостоятельно и дойдет до скорости, близкой к синхронной.
То поле, которое вращается в одном направлении с ротором, называется прямо вращающимся или прямым, другое поле — обратно вращающимся или обратным. При вращении ротора оба эти поля неодинаковы: обратное поле ослабляется, тогда как прямо вращающееся поле усиливается. При скорости вращения, близкой к синхронной, обратное поле ослабляется настолько, что результирующее поле становится почти круговым.
Ослабление обратного поля при работе однофазного двигателя объясняется следующим образом. Если ротор относительно прямого поля имеет скольжение s, то относительно обратного поля он будет иметь скольжение
 .
.
Следовательно, токи, наведенные обратным полем в обмотке ротора, будут иметь высокую частоту, например при s = 0,05 она равна (2 - s)f1 = 1,95·50 = 97,5 Гц. Индуктивное сопротивление обмотки ротора при такой частоте будет во много раз больше ее активного сопротивления. Токи будут почти чисто реактивными; они будут оказывать сильное размагничивающее действие, т. е. ослаблять обратное поле.
Таким образом, при малых значениях скольжения вращающий момент в однофазных двигателях создается в основном в результате взаимодействия прямого поля и наведенных им в обмотке ротора токов. Тормозящий момент от взаимодействия обратного поля, сильно ослабленного, и наведенных им в обмотке ротора токов (почти чисто реактивных) имеет малое значение.
На рис. 3-87 показаны как функции скольжения кривые моментов М' от прямого поля. М" от обратного и М результирующего.

Рис. 3-87. Кривые вращающих моментов однофазного двигателя (М = М' + М").
Так как ток в роторе однофазного двигателя образуется наложением двух токов резко различных частот, то электрические потери в роторе можно считать равными сумме потерь, вызываемых каждым из токов в отдельности. Поэтому электрические потери в роторе однофазного двигателя примерно вдвое больше тех же потерь в роторе трехфазного двигателя соответствующей мощности. Здесь имеются в виду двигатели с таким выполнением обмотки ротора, при котором можно не считаться с вытеснением тока в ее проводниках. Если же двигатели имеют на роторе глубокие пазы или двойную клетку, то потери от токов, наведенных обратным полем в проводниках обмотки ротора, значительно возрастают из-за вытеснения в них тока.
Кроме того, cos![]() однофазного
двигателя ниже, чем трехфазного двигателя,
так как у первого больше ток холостого
хода (за счет его реактивной составляющей).
Последнее станет понятным, если мы
рассмотрим работу двигателя, вращающегося
с синхронной скоростью, при разомкнутой
и замкнутой обмотке ротора. В первом
случае обе н.с. — прямая и обратная —
создадут одинаковые поля, наводящие в
обмотке статора э.д.с., уравновешивающие
почти полностью приложенное напряжение.
однофазного
двигателя ниже, чем трехфазного двигателя,
так как у первого больше ток холостого
хода (за счет его реактивной составляющей).
Последнее станет понятным, если мы
рассмотрим работу двигателя, вращающегося
с синхронной скоростью, при разомкнутой
и замкнутой обмотке ротора. В первом
случае обе н.с. — прямая и обратная —
создадут одинаковые поля, наводящие в
обмотке статора э.д.с., уравновешивающие
почти полностью приложенное напряжение.
Во втором случае обратная н.с. создается не только токами статора, но и токами ротора, наведенными обратным полем; она, так же как и обратное поле, сильно ослабляется. Поэтому прямая н.с. статора в данном случае должна возрасти настолько, чтобы создаваемое ею прямое поле наводило в обмотке статора э.д.с., почти полностью уравновешивающую приложенное напряжение. Во втором случае ток статора будет почти в 2 раза больше, чем в первом случае. Этим и объясняется увеличение тока холостого хода однофазного двигателя.
Увеличение скольжения вызывает увеличение тормозящего момента от обратного поля, поэтому максимальный момент однофазного двигателя меньше, чем у соответствующего трехфазного двигателя.
Коэффициент полезного действия
однофазного двигателя также ниже
вследствие увеличенных потерь в обмотке
ротора, а также в обмотке статора из-за
ухудшения cos![]() .
.
Пуск в ход однофазного двигателя обычно производится при наличии на статоре вспомогательной фазы Она представляет собой обмотку, размещенную в пазах статора так, чтобы ее н.с. была пространственно сдвинута на 90 эл. град, относительно н.с. главной обмотки статора. Ток во вспомогательной обмотке должен быть сдвинут по фазе по отношению к току главной обмотки Если созданы указанные условия, то обе обмотки вызовут вращающееся магнитное поле. Оно будет несимметричным, но создаваемый им момент в случае небольшого тормозящего момента на валу получается все же достаточным для пуска двигателя в ход. Вспомогательная обмотка выключается, когда двигатель достигает примерно нормальной частоты вращения, так как она рассчитывается на кратковременную нагрузку.
Следовательно, при пуске двигатель работает как двухфазный, а при нормальной частоте вращения — как однофазный. Для получения тока во вспомогательной обмотке, сдвинутого по фазе относительно тока в главной обмотке, последовательно с первой включают активное сопротивление (рис. 3-88,а) или емкость (рис. 3-88,б).

Рис. 3-88. Пусковые схемы однофазных двигателей
Применение емкости позволяет осуществить сдвиг по фазе между указанными токами равным 90°, что дает значительное увеличение начального вращающего момента.
Вместе с тем получили распространение
однофазные двигатели, у которых
вспомогательная фаза и соединенная
последовательно с ней емкость остаются
включенными во все время работы двигателя.
Такие конденсаторные двигатели по
сравнению с обычными однофазными,
работающими с отключенной вспомогательной
фазой, имеют больший максимальный момент
и лучшие к.п.д. и cos![]() .
.
3-22.2. Однофазный двигатель, полученный из трехфазного
Рассмотрим более подробно работу однофазного двигателя, полученного из трехфазного, при использовании только двух фаз его обмотки статора, соединенной в звезду Как отмечалось, такой режим работы может получиться и у трехфазного двигателя в случае обрыва одного из проводов, подводящих к нему ток (рис. 3-89).

Рис. 3-89. Схема двигателя при однофазном питании.
При исследовании однофазного двигателя обратимся к методу симметричных составляющих. На основе этого метода и в соответствии со схемой, представленной на рис 3-89, можно написать следующие уравнения для токов и напряжений, указанных на том же рисунке:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ,
(3-206)
,
(3-206)
где
![]() и
и
![]() —
симметричные составляющие прямой и
обратной последовательностей фазного
тока статора
—
симметричные составляющие прямой и
обратной последовательностей фазного
тока статора
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
(3-207)
.
(3-207)
где
![]() и
и
![]() —
симметричные составляющие фазного
напряжения статора
—
симметричные составляющие фазного
напряжения статора
![]() .
.
Из (3-206) и (3-207) имеем:
![]() ;
;
![]() ;
;
 ; (3-208)
; (3-208)
![]() .
(3-209)
.
(3-209)
Полагая, что напряжения
![]() и
и
![]() действуют
независимо одно от другого, и обозначая
через Zs1
и Zs2
полные сопротивления машины соответственно
для токов прямой и обратной
последовательностей, получаем:
действуют
независимо одно от другого, и обозначая
через Zs1
и Zs2
полные сопротивления машины соответственно
для токов прямой и обратной
последовательностей, получаем:
![]() ;
;
![]() .
(3-210)
.
(3-210)
Теперь, учитывая (3-208) и (3-209), можно написать:
![]() ;
(3-211)
;
(3-211)
![]() ;
(3-212)
;
(3-212)
![]() .
(3-213)
.
(3-213)
Уравнению (3-213)
соответствует схема замещения однофазного
двигателя, представленная на рис.
3-90. Здесь сопротивления Z1,
Z12,
![]() ,
,
![]() те
же, что и для трехфазного двигателя (для
малых двигателей
те
же, что и для трехфазного двигателя (для
малых двигателей
![]() ,
,
![]() ;
для средних и больших двигателей
;
для средних и больших двигателей
![]() и
и
![]() вследствие
вытеснения тока в проводниках обмотки
ротора).
вследствие
вытеснения тока в проводниках обмотки
ротора).
В соответствии с рис. 3-90 [или с (3-213)] можно мысленно представить себе, что рассматриваемый однофазный двигатель заменен двумя одинаковыми трехфазными асинхронными машинами, имеющими механически соединенные роторы и последовательно включенные статорные обмотки, создающие поля, вращающиеся в разные стороны (рис. 3-91).

Рис. 3-90. Схема замещения однофазного двигателя (см. рис. 3-89).

Рис. 3-91. Агрегат из двух трехфазных асинхронных машин, схема замещения которого соответствует схеме замещения однофазного двигателя (рис. 3-90).
Найдем напряжения на фазах статора (рис. 3-89). Они согласно (3-207), (3-210) и (3-212) равны:
![]() ;
;
![]() ;
;
![]() .
(3-214)
.
(3-214)
Отсюда, учитывая (3-213), получим:
![]() ;
;
![]() ;
;
![]() .
(3-215)
.
(3-215)
Из (3-215) следует, что фазные напряжения зависят от скольжения по величине и фазе: например, при s = 1, когда Zs1 = Zs2,
![]() ;
;
![]() ;
;
![]() ;
(3-216)
;
(3-216)
при s
![]() 0,
0,
![]()
 ;
;
 ;
;
 .
(3-217)
.
(3-217)
Уравнения (3-217)
показывают, что при s
![]() 0
получается почти симметричная система
напряжений, чему соответствует почти
круговое вращающееся поле в машине.
0
получается почти симметричная система
напряжений, чему соответствует почти
круговое вращающееся поле в машине.
Приведенные уравнения и схема замещения
позволяют для любого скольжения при
известных параметрах машины рассчитать
Zs1
и ZS2,
модуль
![]() ,
затем токи I1 =
I2, I
по (3-213),
напряжения U1 =
I1zsl,
U2 = I2zs2
и соответствующие им мощности и вращающие
моменты (М'; М" и М).
,
затем токи I1 =
I2, I
по (3-213),
напряжения U1 =
I1zsl,
U2 = I2zs2
и соответствующие им мощности и вращающие
моменты (М'; М" и М).
Значения комплексов zsl
и zs2
могут быть также определены при помощи
круговой диаграммы, построенной для
трехфазного двигателя. Для этого надо
вектор напряжения, для которого построена
круговая диаграмма, разделить на векторы
тока при скольжениях s
и 2-s. Для тех же
скольжений, определив, как указывалось,
I1 = I2
и затем U1 и U2,
по той же круговой диаграмме можно
определить моменты М' и М".
При этом масштаб для момента должен
быть изменен пропорционально квадрату
соответственного напряжения:
 и,
и,
 где
СM — масштаб
для момента круговой диаграммы,
построенной для напряжения U
(
где
СM — масштаб
для момента круговой диаграммы,
построенной для напряжения U
(![]() ).
).
Исследования на основе изложенного
метода показывают, что максимальный
момент двигателя при «однофазном
питании» снижается до 45
![]() 50%
максимального момента двигателя при
нормальном «трехфазном питании».
Мощность на валу однофазного двигателя
должна быть снижена примерно до 50
50%
максимального момента двигателя при
нормальном «трехфазном питании».
Мощность на валу однофазного двигателя
должна быть снижена примерно до 50
![]() 55%
номинальной мощности трехфазного
двигателя, чтобы электрические потери
в его обмотках были равны тем же потерям
трехфазного двигателя при номинальной
нагрузке.
55%
номинальной мощности трехфазного
двигателя, чтобы электрические потери
в его обмотках были равны тем же потерям
трехфазного двигателя при номинальной
нагрузке.
В отличие от трехфазного двигателя максимальный вращающий момент Мм однофазного двигателя зависит от активного сопротивления r2 роторной цепи, так как он получается в результате сложения моментов М' и М" от прямого и обратного полей (см. рис. 3-87). При увеличении r2 максимальные моменты ММ' и ММ" не изменяются по величине, но соответствующие им скольжения увеличиваются. Поэтому при увеличении r2 момент Mм уменьшается (рис. 3-92).

Рис. 3-92. Кривые М = f(s) однофазного асинхронного двигателя при различных активных сопротивлениях цепи ротора.
Изложенный метод может быть также применен для исследования однофазного двигателя, имеющего главную обмотку, занимающую две трети окружности статора, и вспомогательную обмотку, занимающую оставшуюся треть этой окружности и отключенную после пуска. Как указывалось, такой двигатель при пуске работает в качестве двухфазного с обмотками на статоре, сдвинутыми пространственно на 90 эл. град, но в общем случае при несимметричной двухфазной системе напряжений на его зажимах.
3-22.3. Двухфазные двигатели. Пуск в ход однофазных двигателей
Пусковые схемы однофазных двигателей представлены на рис. 3-93.

Рис. 3-93. Пусковые схемы однофазного асинхронного двигателя с активным (а), индуктивным (б) и емкостным (в) сопротивлениями во вспомогательной фазе.
При пуске, когда рубильник замкнут, мы
имеем двухфазную машину с главной фазой
(или обмоткой) а и вспомогательной
фазой (или обмоткой) b.
Будем считать, что в исследуемой машине
обе обмотки пространственно сдвинуты
на 90 эл. град и имеют равные числа витков,
обмоточные коэффициенты, числа пазов,
в которых они расположены, и, кроме того,
их полные сопротивления также равны
между собой. В воздушном зазоре такой
машины создается круговое вращающееся
поле, если к фазам а и b
подведена симметричная двухфазная
система напряжений
![]() и
и
![]() .
.
Такое же поле будет создаваться и в том
случае, если эффективные числа витков
фаз а и b (wak0a
и wbk0b
— произведения чисел витков на обмоточные
коэффициенты) различны, но к ним подводятся
напряжения
![]() и
и
![]() ,
где
,
где
![]() .
Если привести фазу b
к фазе а, то надо принять, что к ней
подведено напряжение
.
Если привести фазу b
к фазе а, то надо принять, что к ней
подведено напряжение
![]() и
ток в ней равен
и
ток в ней равен
![]() .
Мы при этом будем считать, что сопротивления
фаз а и b связаны
соотношениями: r1b
= k2r1а
и x1b
= k2x1а.
.
Мы при этом будем считать, что сопротивления
фаз а и b связаны
соотношениями: r1b
= k2r1а
и x1b
= k2x1а.
Если к обмоткам подведены несимметричные
напряжения
![]() и
и
![]() ,
то, как и в случае трехфазной машины,
следует обратиться к методу симметричных
составляющих. В применении к двухфазной
системе основные уравнения этого метода
имеют следующий вид: для напряжений
(рис.
3-94)
,
то, как и в случае трехфазной машины,
следует обратиться к методу симметричных
составляющих. В применении к двухфазной
системе основные уравнения этого метода
имеют следующий вид: для напряжений
(рис.
3-94)

Рис. 3-94. Симметричные составляющие двухфазной системы напряжений (при k = 1).
![]() ;
;
![]() ;
(3-218)
;
(3-218)
для токов
![]() ;
;
![]() ,
(3-219)
,
(3-219)
где
![]() ;
;
![]() и
и
![]() ;
;
![]() —
напряжения и токи прямой последовательности,
а
—
напряжения и токи прямой последовательности,
а
![]() ;
;
![]() и
и
![]() ;
;
![]() —
напряжения и токи обратной последовательности.
—
напряжения и токи обратной последовательности.
Из (3-218) и (3-219) следует:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
(3-220)
.
(3-220)
Можем считать, так же как для трехфазной
машины, что системы напряжений
![]() ;
;
![]() и
и
![]() ;
;
![]() действуют
независимо одна от другой.
действуют
независимо одна от другой.
Примем, что ротор вращается в сторону
вращения поля, соответствующего
напряжениям
![]() ;
;
![]() ,
тогда по отношению к этим напряжениям
двухфазная асинхронная машина будет
работать двигателем со скольжением s,
а по отношению к напряжениям
,
тогда по отношению к этим напряжениям
двухфазная асинхронная машина будет
работать двигателем со скольжением s,
а по отношению к напряжениям
![]() ;
;
![]() она
будет работать тормозом со скольжением
2 - s.
она
будет работать тормозом со скольжением
2 - s.
Если обозначить через Zsl и Zs2 полные сопротивления машины соответственно при скольжениях s и 2 - s, то можно написать:
![]() ;
;
![]() .
(3-221)
.
(3-221)
Рассмотрим теперь уравнения для токов и напряжений однофазного двигателя, который получается из двухфазного путем отключения от сети фазы b:
 (3-222)
(3-222)
Приведенные уравнения показывают, что
для данного двигателя может быть
начерчена схема замещения, не отличающаяся
от схемы замещения однофазного двигателя,
полученного из трехфазного путем
отключения от сети одной его фазы (см.
рис.
3-90, где вместо
![]() надо
взять
надо
взять
![]() ).
Следовательно, здесь также можно считать,
что однофазный двигатель аналогичен
агрегату, состоящему из двух механически
соединенных одинаковых двухфазных
машин с последовательно включенными
статорными обмотками, создающими поля,
вращающиеся в разные стороны (см. рис.
3-91, где надо заменить трехфазные
обмотки двухфазными и вместо
).
Следовательно, здесь также можно считать,
что однофазный двигатель аналогичен
агрегату, состоящему из двух механически
соединенных одинаковых двухфазных
машин с последовательно включенными
статорными обмотками, создающими поля,
вращающиеся в разные стороны (см. рис.
3-91, где надо заменить трехфазные
обмотки двухфазными и вместо
![]() взять
взять
![]() ).
).
Очевидно, что исследование однофазного двигателя при его работе и в этом случае может производиться при помощи схемы замещения или круговой диаграммы соответствующего симметричного двухфазного двигателя.
Отметим, что если обмотка однофазного двигателя (главная его обмотка занимает не две трети окружности статора, как в рассмотренном ранее случае, в кривой ее н. с. будут иметь место высшие гармонические порядка, кратного трем. Они повышают потери в машине и могут вызвать вибрации и шум при ее работе. Однако в обычных случаях их амплитуды невелики, и мы будем считать, что поле токов машины распределено в воздушном зазоре вдоль окружности синусоидально.
Исследуем пуск двигателя. При этом обратимся к рассмотренной в предыдущем двухфазной машине. Ее фаза а непосредственно приключена к сети и используется как главная обмотка, а фаза b используется как вспомогательная обмотка; она может быть приключена к сети через активное, индуктивное или емкостное сопротивление (рис. 3-93).
Обозначим в общем случае через Z внешнее сопротивление, включенное в фазу b. В соответствии с обозначениями рис. 3-93 напишем:
![]() ;
;
![]() .
(3-223)
.
(3-223)
Отсюда следует:
![]() ;
;
![]() .
(3-224)
.
(3-224)
Учитывая (3-218) и (3-219), из (3-224) получим:
![]()
или, подставляя (3-221),
![]() .
.
Так как при пуске (s = 1) Zs1 =Zs2 = Zк (сопротивлению короткого замыкания симметричной машины), то будем иметь:
![]() (3-225)
(3-225)
где
![]()
Из предыдущего определяем
![]() и
и
![]() :
:
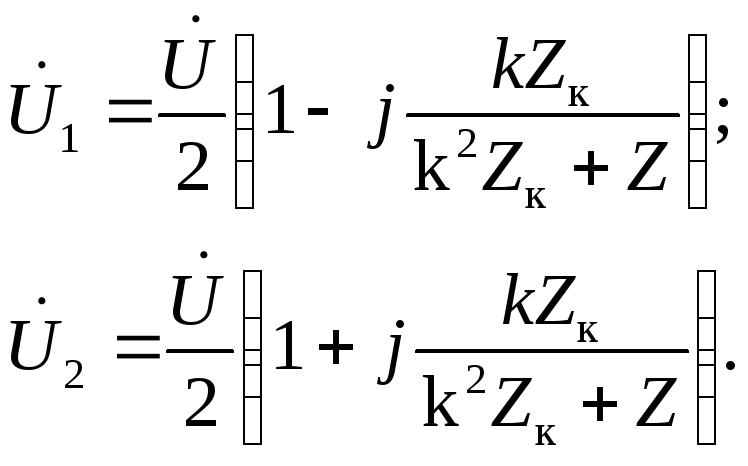 (3-226)
(3-226)
Полученные уравнения позволяют выяснить, при каком значении Z для данного k будет создаваться максимальный начальный пусковой момент.
Введем в (3-226)
обозначения:
![]() и
и
![]() ;
после этого получим:
;
после этого получим:
 (3-227)
(3-227)
Далее обозначим
![]() ,
полагая g переменным,
но z
при этом будем считать постоянным:
например, если в фазу b
включается активное сопротивление, то
z
= 0 = const, если конденсатор,
то z
=
,
полагая g переменным,
но z
при этом будем считать постоянным:
например, если в фазу b
включается активное сопротивление, то
z
= 0 = const, если конденсатор,
то z
=
![]() =
const. При включении в фазу
b реактивной катушки
также будем считать, что для нее
=
const. При включении в фазу
b реактивной катушки
также будем считать, что для нее
![]() =
tg z
= const.
=
tg z
= const.
При g = 0 внешнее
сопротивление Z = 0,
чему соответствует непосредственное
подключение фазы b к
сети. Согласно (3-227)
в этом случае модули
![]() и
и
![]() равны
между собой (
равны
между собой (![]() при
k = 1) и, следовательно,
моменты от прямого и обратного полей
одинаковы и Мнач = 0.
при
k = 1) и, следовательно,
моменты от прямого и обратного полей
одинаковы и Мнач = 0.
При g = , Z = фаза b разомкнута и машина превращается в однофазную, не создающую никакого момента в начале пуска. Для этого случая U1 =U2 = U/2.
Найдем теперь, при каком значении g
момент Мнач будет максимальным.
Для этого надо определить максимум
функции
![]() ,
так как Мнач пропорционален
,
так как Мнач пропорционален
![]() .
Преобразим уравнения (3-227),
подставляя в них
.
Преобразим уравнения (3-227),
подставляя в них
![]() и
и
![]() и
учитывая, что
и
учитывая, что
![]() и
и
![]() (
(![]() и
и
![]() –
векторы, сопряженные с
–
векторы, сопряженные с
![]() и
и
![]() ):
):
 (3-228)
(3-228)
Отсюда получим
 (3-229)
(3-229)
Согласно условию
![]() величина
величина
![]() будет
максимальной при g =
k2, т. е. при z
= k2zк.
будет
максимальной при g =
k2, т. е. при z
= k2zк.
Таким образом, мы нашли, что для любой машины при ее пуске в ход с использованием вспомогательной фазы максимальный момент Mнач.м получается в том случае, если абсолютное значение активного, индуктивного или емкостного сопротивления, включаемого во вспомогательную фазу, для данного k равно k2zк.
Обозначим через Mg
начальный вращающий момент, развиваемый
машиной, если к ней подводится симметричная
двухфазная система напряжений
![]() или
если
или
если
![]()
![]() тогда
при g = k2
будем иметь:
тогда
при g = k2
будем иметь:
![]() (3-230)
(3-230)
Mнач.м зависит
от
![]() .
Очевидно, при
.
Очевидно, при
![]() момент
Мнач = 0. В обычных случаях
близкие к этому условия получились бы
при включении во вспомогательную фазу
реактивной катушки. Однако для очень
малых двигателей при cosк
> 0,6÷0,7 она может найти себе применение,
если требуется небольшой Mнач.
момент
Мнач = 0. В обычных случаях
близкие к этому условия получились бы
при включении во вспомогательную фазу
реактивной катушки. Однако для очень
малых двигателей при cosк
> 0,6÷0,7 она может найти себе применение,
если требуется небольшой Mнач.
При активном пусковом сопротивлении z =0. В этом случае при g = k2 получим:
![]()
При k = 1 в идеальном
случае, когда φк = 90°, мы получили
бы Mнач м =
0,5Mg;
но в обычных случаях при k
= 1 Мнач м
![]() (0,3
(0,3
![]() 0,4)
Mg.
Можно увеличить Мнач м за счет
уменьшения
0,4)
Mg.
Можно увеличить Мнач м за счет
уменьшения
![]() .
Однако при этом может получиться
чрезмерный ток Ib
во вспомогательной фазе (следовательно,
и начальный пусковой ток из сети
.
Однако при этом может получиться
чрезмерный ток Ib
во вспомогательной фазе (следовательно,
и начальный пусковой ток из сети
![]() ,
что видно из выражения для Ib
при g = k2,
которое выводится из приведенных ранее
уравнений):
,
что видно из выражения для Ib
при g = k2,
которое выводится из приведенных ранее
уравнений):
![]() .
.
Обычно пусковое сопротивление R
![]() O,5zк.
Пуск через активное сопротивление на
практике применяется довольно часто.
При этом во многих случаях двигатели
имеют вспомогательную обмотку, выполненную
из провода повышенного сопротивления
(тонкий медный провод, стальной или
латунный провод), что исключает
необходимость включать в нее внешнее
сопротивление R.
O,5zк.
Пуск через активное сопротивление на
практике применяется довольно часто.
При этом во многих случаях двигатели
имеют вспомогательную обмотку, выполненную
из провода повышенного сопротивления
(тонкий медный провод, стальной или
латунный провод), что исключает
необходимость включать в нее внешнее
сопротивление R.
При конденсаторном пуске
![]() (рис.
3-93,в).
Если по (3-230)
рассчитать максимальный начальный
момент для обычных значений φк,
то можно видеть, что его значение
получается очень большим: например, для
cos φк = 0,3 (φк
= 72,5°) при k = 1 он будет
равен:
(рис.
3-93,в).
Если по (3-230)
рассчитать максимальный начальный
момент для обычных значений φк,
то можно видеть, что его значение
получается очень большим: например, для
cos φк = 0,3 (φк
= 72,5°) при k = 1 он будет
равен:
![]() .
.
Однако такой большой момент получается при чрезмерном напряжении Uь на вспомогательной фазе. Действительно, согласно (3-218) и (3-227) при k = 1 и, следовательно, g = 1 имеем:
![]()
или абсолютное значение (с учетом
равенства
![]() )
)
![]() ,
,
что для приведенного примера дает:
![]() .
.
Напряжение Ub имеет недопустимое значение. Оно создало бы слишком сильное насыщение стальных участков магнитной цепи машины и очень большой ток в обмотке b, который привел бы к ее повреждению. Это следует иметь в виду при выборе емкости пускового конденсатора.
Обычно при конденсаторном пуске стремятся получить Мнач = Мg. Для этого надо иметь симметричную двухфазную систему напряжений на зажимах обмоток а и b (см. следующий пункт 3.22.4).
3-22.4. Однофазные асинхронные двигатели. Конденсаторные двигатели
Наличие конденсатора во вспомогательной обмотке не только улучшает пусковые характеристики однофазного двигателя, но может также значительно улучшить его рабочие характеристики (к.п.д. и cosφ) и повысить, его использование.
Однофазные двигатели, работающие с постоянно включенным во вспомогательную обмотку конденсатором, называются конденсаторными. Конденсатор в этом случае называется рабочим. Если вспомогательная обмотка вместе с конденсатором используется только во время пуска двигателя, то его называют двигателем с конденсаторным пуском. В последующем рассматриваются вопросы, касающиеся выбора емкостей пускового и рабочего конденсаторов.
Напишем уравнения напряжений конденсаторного двигателя (см. рис. 3-93,в):
![]() ;
;
![]() .
(3-231)
.
(3-231)
Используя (3-218) и (3-219), получим:
![]() .
(3-232)
.
(3-232)
Если теперь в уравнение (3-232)
подставить известные равенства
![]() ;
;
![]() и
и
![]() ,
то оно принимает следующий вид:
,
то оно принимает следующий вид:
![]() .
(3-233)
.
(3-233)
Для получения кругового вращающегося
поля необходимо, чтобы напряжение, а,
следовательно, и ток обратной
последовательности были равны нулю.
Учитывая это условие (![]() ),
из (3-233)
имеем:
),
из (3-233)
имеем:
![]() .
(3-234 )
.
(3-234 )
Комплексное выражение (3-234) будет равно нулю только в том случае, если будут равны нулю его мнимая и вещественная части каждая отдельно. Поэтому при замене Zsl = rsl + jxsl получим:
![]() ;
;
![]() .
(3-235)
.
(3-235)
Приведенное равенство показывает, что k должно равняться xsl/rs1 = tgφ1 чтобы получилось круговое вращающееся поле. Но при. этом емкостное сопротивление хC не может выбираться произвольно, так как оно должно удовлетворять равенству
![]() .
.
Следовательно, оба равенства (3-235) должны удовлетворяться одновременно.
Чтобы пояснить указанные условия,
обратимся к примеру. Допустим, что
круговое вращающееся поле должно
получиться при пуске двигателя (при s
= 1), имеющего cos φк
= 0,4. Тогда
![]() ;
следовательно, эффективное число витков
фазы b должно быть в
2,3 раза больше, чем фазы а, но круговое
вращающееся поле получится только при
;
следовательно, эффективное число витков
фазы b должно быть в
2,3 раза больше, чем фазы а, но круговое
вращающееся поле получится только при
![]() .
.
Если необходимо определить k и хC для получения кругового вращающегося поля при работе того же двигателя с некоторой нагрузкой (например, при s = 0,06), то сначала надо найти cosφ1, соответствующий этой нагрузке (расчетом или по круговой диаграмме двухфазного симметричного двигателя). Примем cosφ1, = 0,75 при s = 0,06. Тогда k = xs1/rs1 = = tgφ1 = 0,88 и хC = xs1/cos2φ1 = l,78xsl, т. е wbkob должно составлять 88% wakoa, а сопротивление конденсатора должно быть в 1,78 раза больше индуктивного сопротивления двигателя при s = 0,06.
Следовательно, если выбираются значения k и xC для создания наиболее благоприятных условий при работе двигателя с нагрузкой, то при пуске уже не будет получаться круговое поле и Mнач будет относительно небольшим (рис 3-95,б).
Иногда для конденсаторного двигателя выбираются промежуточные значения k и xC, чтобы иметь удовлетворительные пусковые и рабочие характеристики.

Рис. 3-95. Схемы включения однофазного двигателя с конденсатором во вспомогательной обмотке. а — двигатель с пусковым конденсатором; б — двигатель с рабочим конденсатором; в — двигатель с двумя конденсаторами; механические характеристики:1 — двигателя без вспомогательной обмотки; 2 — двигателя с конденсаторным пуском; 3 — двигателя с рабочим конденсатором; 4 — двигателя с двумя конденсаторами (пунктирная прямая соответствует номинальному моменту Мн).
Можно получить значительное улучшение и пусковых и рабочих характеристик при применении двух конденсаторов — пускового, отключаемого по достижении некоторой частоты (обычно 70 — 80% номинальной), и рабочего, постоянно включенного в фазу b (рис. 3-95,в).
Для решения тех же задач можно обратиться к диаграмме напряжений и токов конденсаторного двигателя, работающего с круговым полем (рис 3-96).

Рис. 3-96. Диаграмма напряжений и токов конденсаторного двигателя при работе с круговым вращающимся полем.
Из диаграммы имеем:
![]() ;
(3-236)
;
(3-236)
коэффициент мощности (для тока сети I)
![]() ;
(3-237)
;
(3-237)
отношение эффективных чисел витков
![]() (3-238)
(3-238)
и емкость конденсатора
![]() .
(3-239)
.
(3-239)
Последнее равенство получается из (3-236) и (3-238), так как
![]() .
.
Угол φ1 — угол между током и напряжением симметричного двухфазного двигателя, имеющего при данной нагрузке круговое поле.
Из (3-238) следует, что при изменении нагрузки должны изменяться и k и С, чтобы вращающееся поле оставалось круговым. Практически это не может быть выполнено. Поэтому конденсаторный двигатель обычно рассчитывается таким образом, чтобы получалась симметричная система напряжений или при номинальной нагрузке Рн, или при 0.75Рн.
Коэффициент мощности cosφ1
двухфазных двигателей при Рн
=100
![]() 600
Вт для указанных нагрузок составляет
примерно: cosφ1
600
Вт для указанных нагрузок составляет
примерно: cosφ1
![]() 0,62
— 0,73. В этом случае для конденсаторного
двигателя будем иметь:
0,62
— 0,73. В этом случае для конденсаторного
двигателя будем иметь:
![]() ;
;
![]() ;
k
;
k![]() 0,9
0,9![]() 1,2.
1,2.
Так как при симметрии напряжений обе обмотки потребляют одинаковую мощность, то ток в главной фазе
![]() (3-240)
(3-240)
и во вспомогательной фазе Ib = Ia/k.
Если подставить (3-240) в (3-239), то найдем емкость конденсатора в зависимости от мощности и напряжения двигателя:
![]() .
(3-239а)
.
(3-239а)
Если сюда подставить значения cosφ1,
и обычные значения к. п. д. для указанных
двигателей (η
![]() 0,62
0,62
![]() 0,73),
то при f1 = 50 Гц
ёмкость, мкФ,
0,73),
то при f1 = 50 Гц
ёмкость, мкФ,
![]() ,
(3-239б)
,
(3-239б)
где Р — в ваттах и U — в вольтах.
Начальный пусковой момент конденсаторного двигателя с емкостью, рассчитанной по 3-239б), составляет в обычных случаях 0,2 — 0,4 номинального момента Мн.
3-22.5. Однофазные двигатели с экранированными полюсами
Однофазные двигатели с экранированными полюсами получили в последние годы широкое распространение. Они обычно выполняются на малые мощности (0,5 — 30 Вт) и применяются в тех случаях, где не требуется большой начальный вращающий момент.
По устройству они являются одними из наиболее простых электродвигателей (рис. 3-97): их статорная (главная) обмотка состоит из катушек, надетых на полюсы; ротор имеет короткозамкнутую обмотку в виде клетки.
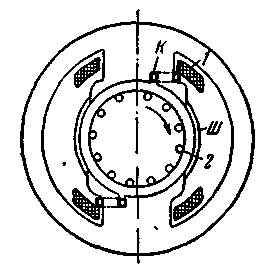
Рис. 3-97. Однофазный двигатель с экранированными полюсами. 1 и 2 — обмотки статора и ротора; K — короткозамкнутый виток; Ш — магнитный шунт.
Для создания пускового момента на статоре помещается вспомогательная обмотка в виде короткозамкнутых витков, охватывающих части полюсов.
Магнитные потоки под этими частями оказываются сдвинутыми по фазе (во времени) и в пространстве относительно потоков под основными частями полюсов, вследствие чего под полюсами возникают бегущие магнитные поля, которые, взаимодействуя с наведенными ими в обмотке ротора токами, создают пусковой вращающий момент.
Направление вращения двигателя указано на рис. 3-97. Оно будет таким же, как направление вращения поля в зазоре от основной части полюса к его экранированной части.
Двигатели имеют относительно низкие значения Мнач, Мм и к.п.д. Некоторое улучшение их пусковых и рабочих характеристик удается получить путем применения магнитных шунтов, которые выполняются из стальных пластинок и помещаются между полюсными наконечниками (рис. 3-97).
3-23. Асинхронные исполнительные двигатели
Для осуществления автоматического управления, регулирования или контроля во многих случаях требуется преобразование «электрического сигнала» в механическое вращение. При этом применяются исполнительные двигатели, в качестве которых часто используются асинхронные двигатели с двумя обмотками на статоре и короткозамкнутым ротором. Обмотки в пазах статора размещаются так же, как в однофазном двигателе, имеющем главную и вспомогательную фазы.
Обычные схемы включения асинхронных исполнительных двигателей приведены на рис. 3-98.

Рис. 3-98. Схемы включения асинхронных исполнительных двигателей.
Здесь одна из фаз статора называется обмоткой возбуждения (В), а другая фаза — обмоткой управления (У). Такие схемы позволяют пускать в ход и останавливать двигатель и регулировать его частоту вращения путем изменения напряжения UУ на обмотке управления; при этом обмотка возбуждения остается приключенной к сети.
В отличие от обычных асинхронных двигателей к исполнительным асинхронным двигателям предъявляется ряд особых требований:
-
отсутствие «самохода» (вращения двигателя после снятия сигнала управления);
-
изменение частоты вращения двигателя в широких пределах при изменении напряжения управления UУ по величине и фазе;
-
устойчивость работы при всех частотах вращения;
-
большой начальный пусковой момент;
-
линейность регулировочных и механических характеристик;
-
малая мощность управления;
-
быстродействие.
Под самоходом двигателя понимается его вращение после снятия сигнала (напряжения) с обмотки управления. Такого вращения (самохода) не должно быть. Двигатель должен быстро останавливаться после отключения обмотки управления. В противном случае он перестает быть управляемым. Для устранения самохода двигателя необходимо, чтобы обмотка его ротора имела большое активное сопротивление.
Обратимся к рис. 3-99, где показаны кривые моментов однофазного двигателя (включена только одна обмотка В): от прямого поля М', от обратного поля М" и результирующего М; здесь же показана кривая момента Mg двухфазного двигателя (включены обе обмотки В и У).

Рис. 3-99. Кривые моментов двигателя при различных активных сопротивлениях роторной обмотки. а — при малом сопротивлении; б — при большом сопротивлении.
Из рис. 3-99,а следует, что при отключении обмотки У работа двигателя переходит с кривой Mg на кривую М и двигатель будет продолжать вращаться в направлении вращения прямого поля, если момент М равен тормозящему моменту на его валу. Следовательно, в этом случае имеем самоход двигателя. Кривые тех же моментов двигателя, обмотка ротора которого имеет большое активное сопротивление, показаны на рис. 3-99,б. Из этого рисунка следует, что здесь самохода не будет, так как при отключении обмотки У работа двигателя переходит с кривой Mg (при скольжении ротора относительно прямого поля sпр < l) на кривую М и двигатель быстро тормозится.
Активное сопротивление роторной обмотки
выбирается таким образом, чтобы
критическое скольжение двигателя в
однофазном режиме было больше единицы;
обычно sк = 2![]() 4.
4.
Большое сопротивление обмотки ротора исполнительного двигателя в то же время обеспечивает его устойчивую работу при широких пределах изменения напряжения на обмотке управления.
Линейность регулировочных характеристик [п = f(Uу) при Mg = const] и механических характеристик [n = f(Mg) при Uу = const] также в значительной степени обеспечивается при большом активном сопротивлении обмотки ротора; при этом под линейностью характеристик здесь понимается их приближение к пропорциональным зависимостям.
Из схем включения асинхронных исполнительных двигателей следует предпочесть схему на рис. 3-98,б, так как при этой схеме вследствие компенсации индуктивного сопротивления обмотки У емкостью заметно снижается мощность управления и в то же время возрастает начальный пусковой момент.
Быстродействие двигателя будет определяться практически только моментом инерции его вращающихся частей, так как электромагнитные процессы здесь затухают весьма быстро из-за относительно больших активных сопротивлений его обмоток. Наибольшее быстродействие имеет двигатель с немагнитным полым ротором.
Асинхронный исполнительный двигатель с немагнитным полым ротором наиболее часто применяется как исполнительный двигатель переменного тока в различных схемах автоматических устройств. Мощность его колеблется от десятых долей ватта до нескольких сотен ватт при частоте вращения от 1 500 до 30 000 об/мин.
Конструкция двигателя представлена на рис. 3-100, и схемы включения его обмоток — на рис. 3-101.

Рис. 3-100. Двигатель с немагнитным полым ротором. 1 — внешний статор; 2 — внутренний статор; 3 — полый ротор; 4 — корпус; 5 — подшипниковые щиты; 6 — обмотки; 7 — вал.

Рис. 3-101. Схемы включения обмоток статора. а — раздельная; б — мостовая.
Внешний статор 1 собирается из тонких
лакированных листов электротехнической
стали толщиной 0,2
![]() 0,5
мм (при частоте тока соответственно 500
— 50 Гц). В пазах статора помещаются
обмотки 6 — возбуждения и управления.
Они могут быть выполнены или в виде двух
отдельных обмоток, изолированных одна
от другой, или в виде обмоток, соединенных
по мостовой схеме (рис.
3-101). Последняя схема применяется
сравнительно редко, несмотря на то, что
электрические потери здесь будут меньше,
чем при двух раздельных обмотках. К
недостаткам ее следует отнести
электрическую связь между цепями
возбуждения и управления и увеличенное
число проводников для обмоток из-за
наличия параллельных ветвей.
0,5
мм (при частоте тока соответственно 500
— 50 Гц). В пазах статора помещаются
обмотки 6 — возбуждения и управления.
Они могут быть выполнены или в виде двух
отдельных обмоток, изолированных одна
от другой, или в виде обмоток, соединенных
по мостовой схеме (рис.
3-101). Последняя схема применяется
сравнительно редко, несмотря на то, что
электрические потери здесь будут меньше,
чем при двух раздельных обмотках. К
недостаткам ее следует отнести
электрическую связь между цепями
возбуждения и управления и увеличенное
число проводников для обмоток из-за
наличия параллельных ветвей.
Внутренний статор 2 также собирается из лакированных листов электротехнической стали и служит для уменьшения магнитного сопротивления главному потоку, проходящему через зазор. Он насаживается на цилиндрический выступ щита.
Полый ротор 3 представляет собой тонкостенный стакан, выполняемый обычно из алюминиевого сплава. Дно стакана жестко укрепляется на валу 7. Толщина его стенки колеблется от 0,2 до 1 мм. Такой ротор имеет очень небольшой момент инерции, что во многих случаях и требуется от исполнительного двигателя.
Зазором в двигателе следует считать зазор между внешним и внутренним статорами. Он относительно велик: 0,5 — 1,5 мм. Вследствие этого возрастают намагничивающие токи обмоток, что приводит к увеличению электрических потерь в них. Кроме того, большие электрические потери возникают в роторе. Поэтому к.п.д. рассматриваемого двигателя имеет низкие значения. Из-за больших потерь приходится увеличивать размеры двигателя, чтобы получились достаточные поверхности охлаждения.
Вращающий момент двигателя создается
в результате взаимодействия вращающегося
поля и вихревых токов, наведенных им в
цилиндрической части ротора. С некоторым
приближением можно контуры вихревых
токов заменить эквивалентной клеткой.
Активное сопротивление r2
такой клетки получается большим, тогда
как ее индуктивное сопротивление х2
невелико: х2
![]() (0,05
(0,05
![]() 0,1)r2.
При этих условиях в большой степени
удовлетворяются указанные требования,
предъявляемые к исполнительному
двигателю.
0,1)r2.
При этих условиях в большой степени
удовлетворяются указанные требования,
предъявляемые к исполнительному
двигателю.
В качестве исполнительного двигателя применяется также асинхронный двигатель с ферромагнитным полым ротором. Такой ротор выполняется в виде полого цилиндра из стали при толщине его стенки от 0,5 до 3 мм. Здесь внутренний статор не требуется, так как поток будет проходить по стенкам цилиндра. На торцах ротора укрепляются диски. Сквозь центральные отверстия дисков проходит жестко связанный с ними вал. Следовательно, конструкция получается более простой, чем в предыдущем случае.
Выполнение его обмоток статора и схемы их включения такие же, как у двигателя с немагнитным полым ротором (рис. 3-98).
Воздушный зазор между статором и ротором в рассматриваемом двигателе берется небольшой (0,2 — 0,3 мм); однако намагничивающие токи его обмоток почти такие же, как у двигателей с немагнитным полым ротором. Объясняется это тем, что магнитная проводимость ферромагнитного полого ротора вследствие малой его толщины незначительна.
Активное сопротивление r2 такого ротора велико, так как удельное сопротивление стали значительно больше, чем меди и алюминия, и, кроме того, здесь резко сказывается эффект вытеснения тока к внешней цилиндрической поверхности ротора, особенно при большой частоте f2 = sf1.
С целью уменьшения r2 иногда производится омеднение ротора: гальваническим путем внешняя цилиндрическая поверхность ротора покрывается слоем меди толщиной 0,05 — 0,1 мм, а торцовые поверхности — слоем меди толщиной до 1 мм. Однако при этом возрастает зазор (от статора до стальной поверхности ротора). Поэтому в ряде случаев ограничиваются омеднением только торцовых поверхностей ротора.
По быстродействию двигатель уступает двигателю с немагнитным полым ротором.
Находит себе применение в качестве исполнительного двигателя и короткозамкнутый двигатель с беличьей клеткой на роторе, имеющей большое активное сопротивление. Его обмотки статора включаются также по схемам, приведенным на рис. 3-98.
Следует еще рассмотреть асинхронный двигатель с массивным ферромагнитным ротором, который применяется в качестве исполнительного, когда приходится приводить во вращение тяжелые маховые массы и когда, следовательно, собственный момент инерции двигателя имеет относительно малое значение. Характеристики этого двигателя несколько лучше, чем у двигателя с ферромагнитным полым ротором. Здесь также иногда применяется омеднение ротора.
Конструкция массивного ротора — более простая и механически значительно более прочная и надежная, чем полого ротора и ротора с беличьей клеткой, собранного из тонких листов. Этим и объясняется, что двигатели с массивным стальным ротором в настоящее время выполняются на очень большие частоты вращения (до 120000—150000 об/мин).
К недостаткам рассматриваемого двигателя, препятствующим его применению взамен обычного короткозамкнутого двигателя, следует отнести относительно низкий максимальный момент Мм из-за повышенного индуктивного сопротивления х2 ротора, большие потери в роторе и, следовательно, низкий к.п.д.
3-24. Асинхронные тахометрические генераторы
Тахометрические генераторы сокращенно называются тахогенераторами. Они служат для преобразования механического вращения в электрический сигнал (напряжение) и широко применяются в настоящее время в схемах различных автоматических устройств, в частности, для автоматизированного электропривода. Они могут также служить для измерения частоты вращения вместо обычных механических тахометров.
Наибольшее распространение из тахогенераторов переменного тока получили асинхронные тахогенераторы с немагнитным полым ротором, по выполнению не отличающиеся в основном от соответствующих исполнительных двигателей (см. рис. 3-100).
Принципиальная схема включения такого асинхронного тахогенератора показана на рис. 3-102.

Рис. 3-102. Схема включения асинхронного тахогенератора (к объяснению принципа действия).
Здесь также на статоре расположены две обмотки d и q, оси которых — продольная и поперечная — сдвинуты в пространстве на 90 эл. град.
К обмотке d подводится переменное напряжение Ud, имеющее постоянные амплитуду и частоту; тогда при вращении ротора тахогенератора на зажимах обмотки q возникает напряжение Uq. Это напряжение будет иметь ту же частоту, что и Ud, и практически будет изменяться пропорционально частоте вращения ротора.
Принцип действия асинхронного тахогенератора основан на следующем.
Будем считать, что к обмотке d подведено напряжение Ud = const при fi = const. Если при этом ротор неподвижен, то возникнет переменный магнитный поток, пульсирующий с частотой f1 по оси обмотки d, аналогичный потоку трансформатора при короткозамкнутой вторичной обмотке. Роль последней в тахогенераторе выполняют контуры ротора, оси которых совпадают с осью обмотки d.
Если ротор вращается, то мы можем мысленно представить себе, что контуры с продольной осью как бы неподвижны в пространстве, так как на смену одним проводникам этих контуров непрерывно поступают другие. Следовательно, как и при неподвижном роторе, в них будут наводиться продольным потоком Фd э.д.с. трансформации edт, имеющие частоту f1. Но теперь будем иметь также контуры, в которых будут наводиться э.д.с. вращения eqвр, от пересечения проводниками магнитных линий потока Фd. Оси этих контуров будут совпадать с поперечной осью, и возникшие в них токи будут создавать поперечную н.с. и, следовательно, поперечный поток Фq.
Можем принять, что э.д.с. вращения в поперечном контуре равна:
![]() .
.
Если сюда подставить окружную частоту
ротора
![]() ,
индукцию в зазоре
,
индукцию в зазоре
![]() (Ф.
—амплитуда продольного потока; c1
— коэффициент пропорциональности), то
получим:
(Ф.
—амплитуда продольного потока; c1
— коэффициент пропорциональности), то
получим:
![]()
(c2 — также коэффициент
пропорциональности). Из последнего
равенства следует, что э.д.с. вращения
в поперечных контурах пропорциональны
частоте вращения n,
имеют частоту f1
и находятся или в фазе, или в противофазе
с потоком Фd.
Такую же частоту f1
будут иметь токи, вызванные э.д.с.
![]() в
поперечных контурах, и созданный ими
поток Фq,
пульсирующий по поперечной оси. Поток
Фq, приблизительно
пропорциональный частоте вращения n,
будет наводить в поперечных контурах
ротора э.д.с. трансформации
в
поперечных контурах, и созданный ими
поток Фq,
пульсирующий по поперечной оси. Поток
Фq, приблизительно
пропорциональный частоте вращения n,
будет наводить в поперечных контурах
ротора э.д.с. трансформации
![]() и
в то же время э.д.с. Еqт
в обмотке статора q.
и
в то же время э.д.с. Еqт
в обмотке статора q.
Электродвижущие силы
![]() будут
направлены почти прямо противоположно
по отношению к э.д.с.
будут
направлены почти прямо противоположно
по отношению к э.д.с.
![]() ;
их результирующие будут создавать токи
в поперечных контурах. Если поперечные
контуры заменить эквивалентной поперечной
обмоткой, приведенной к обмотке статора
q, то ее можно
рассматривать как первичную обмотку
трансформатора, а э.д.с. вращения
;
их результирующие будут создавать токи
в поперечных контурах. Если поперечные
контуры заменить эквивалентной поперечной
обмоткой, приведенной к обмотке статора
q, то ее можно
рассматривать как первичную обмотку
трансформатора, а э.д.с. вращения
![]() такой
обмотки — как подведенное к ней
напряжение. Тогда Еqт
— э.д.с. трансформации, наведенная
потоком Фq в
этой эквивалентной обмотке. Она сдвинута
по фазе почти на 180 град относительно
э.д.с.
такой
обмотки — как подведенное к ней
напряжение. Тогда Еqт
— э.д.с. трансформации, наведенная
потоком Фq в
этой эквивалентной обмотке. Она сдвинута
по фазе почти на 180 град относительно
э.д.с.
![]() .
Напряжение
.
Напряжение
![]() найдем,
если вычтем из
найдем,
если вычтем из
![]() падения
напряжения в обмотке q.
падения
напряжения в обмотке q.
Тот же поток Фq
будет наводить э.д.с. вращения
![]() в
продольных контурах ротора, которые
будут пропорциональны частоте вращения
n, иметь частоту f1
и находиться в противофазе или в фазе
с потоком Фq.
Если также заменить продольные контуры
ротора эквивалентной продольной
обмоткой, приведенной к обмотке статора
d, то ее можно
рассматривать как обмотку трансформатора,
а э.д.с. трансформации Еdт
такой обмотки — как подведенное к ней
напряжение. Электродвижущая сила
вращения
в
продольных контурах ротора, которые
будут пропорциональны частоте вращения
n, иметь частоту f1
и находиться в противофазе или в фазе
с потоком Фq.
Если также заменить продольные контуры
ротора эквивалентной продольной
обмоткой, приведенной к обмотке статора
d, то ее можно
рассматривать как обмотку трансформатора,
а э.д.с. трансформации Еdт
такой обмотки — как подведенное к ней
напряжение. Электродвижущая сила
вращения
![]() ,
наведенная потоком Фq
в этой эквивалентной продольной обмотке,
будет сдвинута по фазе относительно
э.д.с.
,
наведенная потоком Фq
в этой эквивалентной продольной обмотке,
будет сдвинута по фазе относительно
э.д.с.
![]() почти
на 180 град. Напряжение
почти
на 180 град. Напряжение
![]() будет
иметь составляющую — Edт
и составляющие, равные падениям напряжения
в обмотке d.
будет
иметь составляющую — Edт
и составляющие, равные падениям напряжения
в обмотке d.
Количественные соотношения, определяющие
напряжение
![]() при
заданных напряжении
при
заданных напряжении
![]() и
частоты вращения n
могут быть найдены из решения комплексных
уравнений, составленных на основе
представленной выше физической картины
процессов в тахогенераторе.
и
частоты вращения n
могут быть найдены из решения комплексных
уравнений, составленных на основе
представленной выше физической картины
процессов в тахогенераторе.
Путем подбора параметров тахогенератора
и внешней нагрузки Zн
удается свести его погрешности до очень
малых значений. Под погрешностями здесь
понимаются отклонение зависимости Uq
= f(n)
от линейной и отклонение сдвига между
![]() и
и
![]() от
90 град.
от
90 град.
3-25. Асинхронный преобразователь частоты
Электрическую энергию на заводах, фабриках, при строительных работах, в шахтах, сельском хозяйстве обычно получают от сети трехфазного тока нормальной частоты 50 Гц. Для преобразования тока в другую частоту может быть использован асинхронный преобразователь частоты, представляющий собой асинхронную машину с контактными кольцами, приводимую во вращение каким-либо двигателем. Приводным двигателем обычно служит короткозамкнутый асинхронный двигатель.
Асинхронные преобразователи частоты широко применяются для повышения частоты тока, например, в тех случаях, когда для питания быстроходных асинхронных двигателей требуется ток более высокой частоты, чем 50 Гц. Другие агрегаты для преобразования частоты тока (например, синхронный генератор с приводным двигателем) в тех же случаях оказываются более дорогими, особенно при небольших мощностях.
На рис. 3-103 представлена принципиальная схема включения асинхронного преобразователя частоты. Обмотка статора преобразователя (П) приключается к первичной сети нормальной частоты f1, а его обмотка ротора через посредство контактных колец и щеток — ко вторичной сети частоты f2. Приводной двигатель (Д) также приключается к первичной сети.
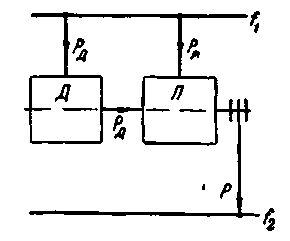
Рис. 3-103. Схема включения асинхронного преобразователя частоты.
Для повышения частоты (f2 > fi) ротор преобразователя приводится во вращение против поля. Тогда э.д.с. E2s = sпE2, наведенная в его обмотке, будет иметь частоту f2 = sпf1 > fi, так как при вращении против поля скольжение преобразователя sп > l.
Полная электрическая мощность Рэ2
цепи ротора при s >
l складывается из мощности
Рэм, перенесенной вращающимся
полем со статора на ротор, и мощности
![]() ,
полученной в результате преобразования
механической мощности, подведенной к
преобразователю со стороны двигателя.
,
полученной в результате преобразования
механической мощности, подведенной к
преобразователю со стороны двигателя.
В соответствии с известными соотношениями [см. (3-69) и (3-70а)] можем написать:
![]() и
и
![]() .
(3-241)
.
(3-241)
Если двигатель имеет рд пар полюсов, а преобразователь рп пар полюсов, то скольжение преобразователя
![]() ,
(3-242)
,
(3-242)
где n1 — частота вращения поля преобразователя;
n2 — частота вращения его ротора (скольжением двигателя пренебрегаем).
Допустим, что в машинах нет потерь. Тогда
будем иметь (рис.
3-103) Рэ2 = Р (мощности
вторичной сети); Рэм = Рп
(мощности преобразователя) и
![]() =
Рд (мощности двигателя).
Соотношения между указанными мощностями
получим, подставив (3-242)
в (3-241):
=
Рд (мощности двигателя).
Соотношения между указанными мощностями
получим, подставив (3-242)
в (3-241):
![]() и
и
![]() .
(3-243)
.
(3-243)
Если преобразователь служит, например, для преобразования тока частоты f1 =50 Гц в ток частоты f2 = 150 Гц, то его скольжение sп = f2/f1 = 3, что согласно (3-242) можно получить при рд = 1 и рп = 2; тогда по (3-243) Рп = 0,33Р и Рд = 0,67Р.
Действительные мощности, потребляемые
преобразователем и двигателем из
первичной сети, будут из-за потерь больше
примерно на 25 — 35% для преобразователей
небольшой мощности (5 — 30 кВА при cosφ2
= 0,8
![]() 0,75).
Следует также учитывать, что через вал
к преобразователю подводится только
активная мощность, тогда как реактивная
мощность для вторичной сети и для самого
преобразователя подводится через его
статор.
0,75).
Следует также учитывать, что через вал
к преобразователю подводится только
активная мощность, тогда как реактивная
мощность для вторичной сети и для самого
преобразователя подводится через его
статор.
К недостаткам асинхронного преобразователя
частоты следует отнести довольно большое
падение напряжения U2
на его вторичных зажимах при переходе
от холостого хода к номинальной нагрузке
(до 10 — 30% при cosφ2 =
1![]() 0,7).
Регулирование U2
здесь возможно путем изменения U1
на первичных зажимах, что на практике
применяется очень редко.
0,7).
Регулирование U2
здесь возможно путем изменения U1
на первичных зажимах, что на практике
применяется очень редко.
В большинстве случаев нагрузку преобразователя со вторичной стороны составляют асинхронные двигатели. Тогда при переходе этих двигателей от работы вхолостую к работе с нагрузкой изменение U2 будет небольшим в соответствии с небольшим изменением потребляемой ими реактивной мощности.
При изготовлении асинхронных преобразователей частоты могут быть использованы части нормальных (серийных) асинхронных двигателей с контактными кольцами. Однако при этом следует иметь в виду, что частота перемагничивания ротора велика (f2 = sпf1). Поэтому необходимо существенно снизить значения индукции в его зубцах и ярме.
Для преобразователя можем написать следующие уравнения напряжений и токов:
![]()
![]() ;
;
![]() ;
;
![]() ,
,
где
![]() ,
,
![]() и
X' — приведенные к
обмотке статора вторичное напряжение
и сопротивления нагрузки преобразователя.
Этим уравнениям соответствует диаграмма
пpeoбpaзoвaтeля, работающего с нагрузкой,
представленная на рис.
3-104.
и
X' — приведенные к
обмотке статора вторичное напряжение
и сопротивления нагрузки преобразователя.
Этим уравнениям соответствует диаграмма
пpeoбpaзoвaтeля, работающего с нагрузкой,
представленная на рис.
3-104.

Рис. 3-104. Векторная диаграмма асинхронного преобразователя частоты.
3-26. Поворотные автотрансформаторы
Поворотным автотрансформатором (применяется также название «индукционный регулятор») будем называть асинхронную машину, работающую с заторможенным ротором в качестве автотрансформатора и позволяющую путем поворота ротора регулировать напряжение на ее вторичных зажимах.
В трехфазном поворотном автотрансформаторе на роторе помещается трехфазная обмотка с выведенными концами в виде гибких проводников, соединенных с обмоткой статора и позволяющих поворачивать ротор на углы в пределах от 0 до 180 эл. град. Обычная его схема приведена на рис. 3-105.

Рис. 3-105. Схема трехфазного поворотного автотрансформатора.
Обмотка ротора здесь служит первичной
обмоткой. Она соединена в звезду (может
быть соединена и треугольником). Обмотка
статора служит добавочной обмоткой. На
ее вторичных зажимах получается
регулируемое напряжение
![]() .
.
Можно также в качестве первичной обмотки использовать обмотку статора, а в качестве добавочной — обмотку ротора. Тогда от последней должно быть выведено шесть гибких проводников.
Иногда на практике в качестве трехфазного поворотного автотрансформатора используется машина с контактными кольцами, предназначенная для работы двигателем. В этом случае обычно приходится заменять обмотки ротора и статора другими обмотками с числами витков (на фазу), соответствующими напряжению U1 и заданным пределам регулирования напряжения U2.
При холостом ходе поворотного
автотрансформатора ток будет проходить
только по обмотке ротора, которая создает
при этом вращающееся магнитное поле.
Это поле будет наводить в обмотках
э.д.с.
![]() и
и![]() .
Электродвижущая сила E1,
обмотки ротора будет почти полностью
уравновешивать напряжение
.
Электродвижущая сила E1,
обмотки ротора будет почти полностью
уравновешивать напряжение
![]() (U1
(U1
![]()
![]() ).
Электродвижущая сила
).
Электродвижущая сила
![]() обмотки
статора будет складываться с напряжением
(
обмотки
статора будет складываться с напряжением
(![]() ;
следовательно, вторичное напряжение
;
следовательно, вторичное напряжение
![]() .
Поворачивая ротор по вращению или против
вращения поля, мы будем изменять взаимное
расположение осей обмоточных фаз статора
и ротора и, следовательно, фазу э.д.с.
.
Поворачивая ротор по вращению или против
вращения поля, мы будем изменять взаимное
расположение осей обмоточных фаз статора
и ротора и, следовательно, фазу э.д.с.
![]() относительно
фазы напряжения
относительно
фазы напряжения
![]() .
В соответствии с этим, как показано на
рис.
3-106, будет изменяться напряжение
U2 от U2макс
= U1 + E2
до U2мин = U1
— Е2. При нагрузке напряжение
U2 будет несколько
отличаться от соответствующего напряжения
при холостом ходе вследствие падений
напряжения в обмотках статора и ротора.
.
В соответствии с этим, как показано на
рис.
3-106, будет изменяться напряжение
U2 от U2макс
= U1 + E2
до U2мин = U1
— Е2. При нагрузке напряжение
U2 будет несколько
отличаться от соответствующего напряжения
при холостом ходе вследствие падений
напряжения в обмотках статора и ротора.

Рис. 3-106. Диаграмма напряжений трехфазного поворотного автотрансформатора, работающего вхолостую, при различных положениях ротора относительно статора.
Поворотный автотрансформатор в отношении охлаждения работает в более тяжелых условиях, чем асинхронный двигатель. Небольшие поворотные автотрансформаторы выполняются с воздушным охлаждением. При большой мощности иногда применяется масляное охлаждение, так же как для масляных трансформаторов.
Для поворота ротора обычно используется червячная передача, причем она должна быть механически достаточно прочной, так как вращающий момент, действующий на ротор при нагрузке поворотного автотрансформатора, достигает больших значений.
Трехфазные поворотные автотрансформаторы применяются в лабораториях, в схемах автоматики и иногда для регулирования напряжения в распределительных сетях.
На практике находят себе применение также однофазные поворотные автотрансформаторы. Обычная схема такого автотрансформатора представлена на рис. 3-107.

Рис. 3-107. Схема однофазного поворотного автотрансформатора.
Здесь однофазная обмотка ротора 1
является первичной обмоткой; обмотка
статора 2 — добавочной обмоткой.
При отсутствии тока в обмотке статора
(холостой ход) н.с. создается только
обмоткой ротора 1. Ее можно заменить
по отношению к оси обмотки статора двумя
н.с.: продольной F1cos![]() и
поперечной F1sin
и
поперечной F1sin![]() ,
где
,
где
![]() —
угол между осями обмоток 1 и 2.
Очевидно, что в обмотке статора будет
наводиться э.д.с. полем, созданным только
продольной н.с. F1cos
—
угол между осями обмоток 1 и 2.
Очевидно, что в обмотке статора будет
наводиться э.д.с. полем, созданным только
продольной н.с. F1cos![]() .
Эта э.д.с., следовательно, может быть
принята равной F2cos
.
Эта э.д.с., следовательно, может быть
принята равной F2cos![]() .
При
.
При
![]() =
0 получается максимальная э.д.с. Е2,
при
=
0 получается максимальная э.д.с. Е2,
при
![]() =
90 эл. град она равна нулю, при дальнейшем
увеличении
=
90 эл. град она равна нулю, при дальнейшем
увеличении
![]() сверх
90 эл. град э.д.с. меняет фазу и при 180 эл.
град становится равной — Е2.
Поэтому при холостом ходе U2
= U1 + F2cos
сверх
90 эл. град э.д.с. меняет фазу и при 180 эл.
град становится равной — Е2.
Поэтому при холостом ходе U2
= U1 + F2cos![]() ;
предельные значения: U2макс
= U1 + E2
и U2мин = U1
- E2. При нагрузке
одновременно с возрастанием тока в
статорной обмотке будет возрастать ток
в обмотке ротора 1, чтобы результирующая
н.с., действующая по оси обмотки 1,
создавала поле, необходимое для получения
в этой обмотке э.д.с. Е1, почти
равной Ui(
;
предельные значения: U2макс
= U1 + E2
и U2мин = U1
- E2. При нагрузке
одновременно с возрастанием тока в
статорной обмотке будет возрастать ток
в обмотке ротора 1, чтобы результирующая
н.с., действующая по оси обмотки 1,
создавала поле, необходимое для получения
в этой обмотке э.д.с. Е1, почти
равной Ui(![]() ).
Для компенсации н.с. F2sin
).
Для компенсации н.с. F2sin![]() на
роторе должна быть помещена короткозамкнутая
обмотка 3, ось которой перпендикулярна
к оси обмотки 1. При отсутствии
обмотки 3 н.с. F2sinα
вызвала бы сильное поле, которое
обусловило бы большое индуктивное
падение напряжения в обмотке 2.
на
роторе должна быть помещена короткозамкнутая
обмотка 3, ось которой перпендикулярна
к оси обмотки 1. При отсутствии
обмотки 3 н.с. F2sinα
вызвала бы сильное поле, которое
обусловило бы большое индуктивное
падение напряжения в обмотке 2.
Здесь также возможно первичную обмотку поместить на статоре, а добавочную — на роторе. В этом случае короткозамкнутая обмотка для компенсации поперечной н.с. ротора помещается на статоре; ось ее должна быть сдвинута на 90 эл. град относительно оси обмотки статора.
Однофазные поворотные автотрансформаторы на практике применяются сравнительно редко и выполняются обычно на небольшие мощности.
3-27. Поворотные трансформаторы
Асинхронная машина при заторможенном роторе может быть использована в качестве преобразователя m1-фазного тока в m2-фазный ток: например, трехфазного тока в пяти- или семифазный ток Для этого ее обмотки статора и ротора должны быть выполнены соответственно на m1 и m2 фаз. Машина будет работать как трансформатор, в котором энергия со статора на ротор будет передаваться вращающимся полем. Такие преобразователи применяются крайне редко и только для специальных целей.
На практике нашли себе применение поворотные трансформаторы, выполняемые так же, как асинхронные машины, и имеющие устройство, позволяющее поворачивать их ротор. Рассмотрим сначала машину, которая со стороны статора получает питание от сети трехфазного тока. Если к зажимам ее статора подводится постоянное напряжение, то при повороте ротора на зажимах его обмотки будем получать напряжение, изменяющееся только по фазе. Такие поворотные трансформаторы называются фазорегуляторами и применяются, например, для регулирования фазы сеточного напряжения ртутного выпрямителя или тиратрона и в измерительной технике, причем в последнем случае главным образом для поверки ваттметров и счетчиков (рис 3-108).

Рис. 3-108. Поворотный трансформатор для поверочных устройств.
На рис. 3-109 показана принципиальная схема поверки счетчика переменного тока с применением поворотного трансформатора.

Рис. 3-109. Принципиальная схема поверки счетчика при помощи поворотного трансформатора (ПТ).
Здесь цепи тока и напряжения поверяемого счетчика Wh и контрольного ваттметра W питаются от общей сети, но через два различных трансформатора, причем цепи напряжения приключены к зажимам ротора поворотного трансформатора. Поворот ротора будет вызывать изменение фазы напряжения на зажимах счетчика и ваттметра, значение же напряжения при этом не будет изменяться. Приведенная схема позволяет получать любой сдвиг фаз между напряжением параллельных цепей счетчика и ваттметра и током их последовательных цепей.
Подобные способы поверки, при которых цепи напряжения и тока измерительных приборов независимы одна от другой, носят название способов фиктивной нагрузки, так как в этих случаях измерительные приборы учитывают фиктивную мощность, равную произведению тока, напряжения и cosφ двух различных цепей.
В схемах автоматических устройств (например, счетно-решающих) нашли себе широкое применение поворотные трансформаторы малой мощности. К ним обычно подводится питание со стороны статора от источника однофазного тока. При этом на обмотке ротора (на выходе) требуется получить напряжение, представляющее собой определенную функцию угла поворота ротора α. Обычно требуется, чтобы это напряжение было пропорционально sinα, cosα или было связано с углом α линейной зависимостью. В соответствии с этим различают синусные, косинусные, синус-косинусные и линейные поворотные трансформаторы.
На рис. 3-110 представлена принципиальная схема двухполюсного поворотного трансформатора с двумя - взаимно-перпендикулярными обмотками на статоре и на роторе.

Рис. 3-110. Схема соединений обмоток синус-косинусного поворотного трансформатора.
Назовем оси обмоток статора S и K соответственно продольной (d) и поперечной (q) осями поворотного трансформатора. Его обмотка статора S включается на переменное напряжение Us. При этом возникает продольное пульсирующее поле, которое будет наводить в обмотках ротора А и В э.д.с. Их значения зависят от угла поворота ротора а, который будем отсчитывать от положения ротора, когда ось его обмотки А совпадает с поперечной осью q.
Очевидно, что при строго синусоидальном распределении поля в зазоре вдоль окружности ротора и при отсутствии нагрузки с вторичной стороны напряжение на обмотке А при повороте ротора будет изменяться пропорционально sinα, a напряжение на обмотке В — пропорционально cosα. Таким образом, при использовании той или другой обмотки ротора получим синусный или косинусный, а при использовании обеих обмоток ротора — синус-косинусный поворотный трансформатор.
К поворотным трансформаторам предъявляются весьма высокие требования в отношении точности соблюдения указанных зависимостей вторичных напряжений от угла α. Эти требования могут быть удовлетворены только при применении специальных обмоток, обеспечивающих близкие к синусоидальным кривые их н.с., при слабом насыщении стальных участков магнитной цепи поворотного трансформатора и при самом тщательном изготовлении его деталей. Кроме того, большое значение имеет правильный выбор чисел пазов статора и ротора и применение скоса пазов ротора или статора.
Напряжения на зажимах вторичных обмоток и при их нагрузке будут пропорциональны sinα и cosα, если эти обмотки и приключенные к ним внешние сопротивления одинаковы. При таком выполнении схемы получается так называемое симметрирование поворотного трансформатора на вторичной стороне. В этом случае поперечные н.с. обеих обмоток ротора, действующие всегда в противоположные стороны, равны между собой при любом α. Здесь, следовательно, не будет возникать поперечный поток, который в обмотке А создавал бы э.д.с., пропорциональную cos2α, а в обмотке В — э.д.с., пропорциональную sin2α. Кроме того, при указанном симметрировании вторичных цепей ротора сумма продольных н.с. его обеих обмоток не будет зависеть от угла α, поэтому и ток в обмотке S статора при Us = const будет сохранять свое значение, что приводит к постоянному значению продольного потока, не зависящему от угла α. Обмотка K на статоре замыкается обычно накоротко или на сопротивление, равное сопротивлению источника однофазного тока, если мощность его невелика. В этом случае получается симметрирование поворотного трансформатора на первичной стороне, которое также препятствует возникновению поперечного потока, например при некотором различии внешних сопротивлений вторичных цепей.
Схема линейного поворотного трансформатора приведена на рис. 3-111.

Рис. 3-111. Схема соединений обмоток линейного поворотного трансформатора.
При такой схеме, где также применяется симметрирование на вторичной стороне, удается получить линейную зависимость напряжения на зажимах последовательно соединенных обмоток K. и А от угла поворота ротора а с точностью до 0,1% примерно в пределах изменения α от - 37 до + 37°.
3-28. Асинхронная машина двойного питания
Если статорная и роторная обмотки асинхронной машины получают питание от сети (или сетей) переменного тока, то такую машину называют асинхронной машиной двойного питания. При этом обычно имеется в виду трехфазная машина, обмотки которой получают питание от одной и той же сети трехфазного тока. Эти обмотки могут включаться параллельно или последовательно. Название «машина двойного питания» характеризует схему включения ее обмоток, а не ее рабочие свойства, которые будут различными в зависимости от направления вращения н с статора и ротора.
Рассмотрим сначала машину с последовательно соединенными обмотками статора и ротора, создающими н.с, вращающиеся в одну и ту же сторону. В этом случае получается регулируемая (поворотная) реактивная катушка, позволяющая путем поворота ротора изменять в широких пределах ее индуктивное сопротивление. При повороте ротора изменяется угол α между осями н.с. последовательно включенных обмоток статора и ротора, вследствие чего изменяется их взаимная индуктивность.
Общее активное сопротивление машины
(на фазу) r = r1
+ r2 = const,
и ее общее индуктивное сопротивление
x = x1
+ x2 + x1г
+ x2г + 2x12сosα, где x1
и х2 — индуктивные сопротивления
рассеяния обмоток; x1г
и x2г — их главные индуктивные
сопротивления (от главного потока в
воздушном зазоре), х12 —
индуктивное сопротивление взаимной
индукции при совпадении осей н.с. обмоток,
когда они направлены в одну сторону.
Чтобы получить изменение х в возможно
более широких пределах, надо обмотки
выполнить с равными эффективными числами
витков Тогда x1г
= x2г = x12, x1
![]() x2
и мы получим:
x2
и мы получим:
![]() .
.
Следовательно, предельные значения при α = 0 и α = 180°:
![]() и
и
![]() .
.
При параллельном включении одинаковых обмоток статора и ротора предельные значения х уменьшаются в 4 раза. Поворотная реактивная катушка находит себе применение при испытании электрических машин и трансформаторов, когда необходимо, например, изменять их индуктивную нагрузку.
Если обмотки статора и ротора асинхронной машины, приключенные к одной и той же сети, создают н.с., вращающиеся в разные стороны, то такая асинхронная маши
на двойного питания может работать как двигатель или генератор. Однако для этого ее надо предварительно разогнать посторонним двигателем до скорости вращения, равной двойной синхронной 2n1. Тогда после подключения обмоток к сети их н.с. будут вращаться в пространстве с одной и той же синхронной скоростью и, следовательно, будут неподвижны одна относительно другой. Созданное их совместным действием магнитное поле будет вращаться с синхронной частотой n1 относительно каждой из обмоток и будет наводить в них э.д.с. частоты сети.
Будем считать, что обмотки статора и ротора одинаковы и что они продключены к сети параллельно. При отсутствии потерь в маши не и при работе ее вхолостую в обмотках будут только намагничивающие токи и созданные ими н.с. будут равны и направлены в одну и ту же сторону. Поле, созданное результирующей н.с., будет наводить э.д.с. в обмотках, почти полностью уравновешивающие приложенные к ним напряжения, что возможно только при частоте вращения ротора, равной 2n1. При отклонении от этой частоты в обмотках возникнут токи, которые можно назвать синхронизирующими, так как созданный ими вращающий момент восстанавливает частоту 2n1. Следовательно, машина обладает свойствами синхронной машины.
При нагрузке машины оси н.с. статора и ротора не будут совпадать, между ними установится некоторый сдвиг в пространстве, но они по-прежнему будут вращаться относительно статора с частотой n1 при частоте ротора 2п1. При этом токи в обмотках увеличиваются, создается вращающий момент, направленный в сторону вращения ротора при работе машины двигателем и против вращения ротора при работе машины генератором, в чем можно было бы убедиться, построив диаграммы напряжений и токов для обмоток. Из диаграмм было бы видно, что при двигательном режиме ток в обмотке сдвинут по фазе относительно э.д.с., наведенной главным полем, на угол, больший 90°, а при генераторном режиме ток в обмотке сдвинет по фазе относительно той же э.д.с. на угол, меньший 90о.
Указанные машины двойного питания не нашли себе практического применения. При использовании их в двигательном режиме требуется разгонный двигатель, при помощи которого можно было бы довести их частоту вращения до двойной синхронной. Кроме того, при включении машины встречаются затруднения при синхронизации ее с сетью. Другим большим недостатком этих машин является склонность их к качаниям и связанная с этим в ряде случаев недостаточная устойчивость в работе (см § 4-12).
3-29. Асинхронные машины для синхронной связи
На практике иногда необходимо иметь согласованное вращение двух или нескольких механизмов, удаленных один от другого на большое расстояние или установленных таким образом, что механическое соединение их, например, при помощи общего вала невозможно или нецелесообразно. Можно в этих случаях использовать трехфазные асинхронные машины с контактными кольцами, которые при определенной схеме их соединения позволяют без общего механического вала осуществить согласованное вращение механизмов (или синхронную связь между ними). Такие асинхронные машины образуют «электрический вал». Схема их соединения, называется схемой электрического вала.
Рассмотрим наиболее часто применяемую схему электрического вала, представленную на рис. 3-112. Здесь показаны два приводных двигателя Д1 и Д11, которые связаны с рабочими механизмами через вал 1 и вал 11.

Рис. 3-112. Схема электрического вала.
Чтобы иметь согласованное вращение механизмов и, следовательно, приводных двигателей, с ними механически соединяются асинхронные машины с контактными кольцами A и В. Статорные обмотки последних приключаются к одной и той же сети трехфазного тока, а роторные обмотки соединяются параллельно через контактные кольца. При такой схеме включения машин А и В они будут выравнивать нагрузки двигателей Д1 и Д11 и в то же время поддерживать синхронное вращение обоих валов.
Когда машины неподвижны, то при одинаковом положении роторов относительно статоров они аналогичны двум параллельно включенным трансформаторам при их работе вхолостую. Если повернуть ротор одной машины при неподвижном роторе другой, то в роторных и соответственно в статорных обмотках возникнут токи. Они создадут в машинах вращающие моменты, которые будут направлены таким образом, чтобы восстановить прежнее положение роторов относительно статоров. Следовательно, на вал каждой машины будет действовать синхронизирующий момент, который будет возрастать с углом поворота ротора, но до известного предела. Если перейти этот предел, то синхронная связь между валами нарушается. Можно считать, что электрический вал осуществляет как бы эластичную связь между рабочими механизмами.
Передача момента при электрическом
вале (как и при эластичном механическом)
возможна не только при покое двух
роторов, но и при их вращении, причем
синхронная связь между ними будет
сохраняться, если вследствие сдвига по
фазе э.д.с. роторов будут возникать токи,
необходимые для создания синхронизирующих
моментов. В этом отношении получается
существенное различие при вращении
роторов по полю и против поля. Если
роторы вращаются в направлении вращения
поля, синхронизирующий момент при s
![]() 0
будет очень мал; если они вращаются
против поля, возможна передача больших
моментов при широких пределах изменения
частоты вращения (рис.
3-113).
0
будет очень мал; если они вращаются
против поля, возможна передача больших
моментов при широких пределах изменения
частоты вращения (рис.
3-113).

Рис. 3-113. Момент электрического вала в зависимости от скольжения.
Мощности машин А и В выбираются в зависимости от наибольшего возможного различия нагрузок двигателей Д1 и Д11. Обычно схема электрического вала по рис. 3-112 применяется в тех случаях, когда нагрузки двигателей Д1 и Д11 мало отличаются одна от другой.
Большое практическое значение в настоящее время имеют малые асинхронные машины, применяемые для осуществления синхронной связи между элементами автоматических устройств. Они получили название сельсинов (Selsyn — сокращение английских слов self-synchronizing («самосинхронизирующийся»). Рассмотренные ранее трехфазные машины, при помощи которых осуществляется синхронная связь между относительно мощными механизмами, иногда называются силовыми сельсинами.) и по устройству представляют собой асинхронные машины с контактными кольцами, имеющие обычно на роторе трехфазную обмотку и на статоре однофазную или трехфазную. Однофазная обмотка статора часто выполняется в виде двух катушек, надетых на два явновыраженных полюса. Она получает питание от источника однофазного тока и называется обмоткой возбуждения. В этом случае сельсины называются однофазными. Трехфазная распределенная обмотка ротора соединяется в звезду. Она называется обмоткой синхронизации.
Статор и ротор такого сельсина собираются из листов электротехнической стали (рис. 3-114), причем ротор делается со скошенными пазами для ослабления зубцовых гармоник в кривых э.д.с. На контактные кольца накладываются щетки, обеспечивающие надежный контакт и малое переходное сопротивление.

Рис. 3-114. Листы статора и ротора однофазного сельсина
В настоящее время широкое применение нашли себе бесконтактные сельсины, первые типы которых были разработаны в Советском Союзе А. Г. Иосифьяном и Д. В. Свечарником. Эти сельсины не имеют скользящих контактов, что повышает надежность и точность их работы.
Устройство бесконтактного сельсина схематически представлено на рис. 3-115.
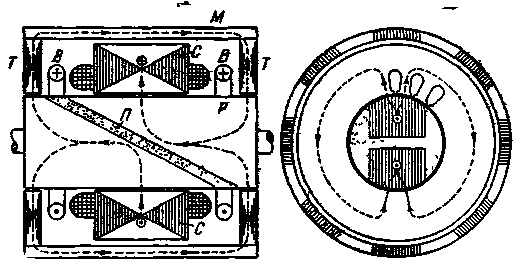
Рис. 3-115. Схема устройства бесконтактного сельсина.
Здесь ротор Р состоит из двух пакетов, набранных из листовой стали и разделенных косым промежутком П, заполненным немагнитным материалом. Листы ротора расположены параллельно оси вала, как показано на рисунке справа. Оба пакета заливаются алюминиевым сплавом и вместе с ним обрабатываются в виде цилиндра. Ротор не имеет никакой обмотки. Статор состоит из основного пакета С и двух боковых колец (тороидов) Т. Основной пакет статора С имеет пазы, в которых уложена трехфазная обмотка синхронизации. Она выполняется так же, как в обычной двухполюсной асинхронной машине. К тороидам примыкают пакеты внешнего магнитопровода М, набранные из полосок электротехнической стали. Они заливаются алюминиевым сплавом и образуют наружный цилиндрический корпус. Между тороидами и основным статорным пакетом помещаются кольцевые катушки В, охватывающие ротор. Они соединяются последовательно и образуют обмотку возбуждения. Как и в случае контактных сельсинов, обмотка возбуждения продключается к однофазной сети, а обмотка синхронизации — к линии связи.
Для выяснения принципа работы бесконтактного сельсина проследим путь магнитного потока, созданного катушками обмотки возбуждения. Примем, что в данный момент времени ток в катушках направлен, как указано на рис. 3-115. Тогда поток будет направлен справа налево. В правой части поток пойдет по стали ротора в аксиальном направлении до промежутка П, где он повернет , и пойдет вверх через зазор между ротором и основным пакетом статора С. Затем, пройдя зубцовый слой статора, поток поворачивает за плоскость чертежа (показано крестиком в кружке) и проходит вдоль ярма статора в его нижнюю часть (точка в кружке), откуда, снова пройдя зубцовый слой статора и зазор, он поступает в ротор, но уже слева от промежутка П. Далее, пройдя левую часть ротора, поток разделяется на две части и через тороиды и магнитопровод возвращается в правую часть ротора. Следовательно, поток, проходя через зубцовый слой статора, будет сцепляться с обмоткой синхронизации. Если поворачивать ротор, то потокосцепления фаз этой обмотки будут изменяться так же, как при повороте ротора контактного сельсина. По принципу действия бесконтактный и контактный сельсины не отличаются один от другого.
В зависимости от назначения и режимов работы различают: сельсины, работающие в индикаторном режиме; сельсины, работающие в трансформаторном режиме, и дифференциальные сельсины.
Однофазные сельсины, работающие в индикаторном режиме, образуют систему, состоящую из датчика и приемника или приемников. Рассмотрим случай, когда от одного датчика работает один приемник, обеспечивающий синхронный поворот или синхронное вращение индикатора (стрелки) в каком-либо пункте, удаленном на некоторое расстояние от датчика. Соответствующая схема включения сельсина-датчика (Д) и сельсина-приемника (П) показана на рис. 3-116.

Рис. 3-116. Схема соединения однофазных сельсинов при индикаторном режиме работы.
Здесь: ВД и ВП — обмотки возбуждения; СД и СП — обмотки синхронизации; Л — линия связи. Принцип действия сельсинов при их соединении по рис. 3-116 заключается в следующем.
Обмотка возбуждения В, подключенная
к сети однофазного тока, создает
пульсирующий по ее оси магнитный поток,
сцепляющийся с фазами обмотки С.
При этом в фазах наводятся э.д.с., амплитуды
которых зависят от угла сдвига осей фаз
относительно оси обмотки В, но по
фазе (во времени) они совпадают (при
максимальном потоке их значения равны
амплитудам; при потоке, равном нулю, их
значения также равны нулю). Примем за
исходное положение ротора, когда ось
его фазы 1 совпадает с осью обмотки
В, и рассмотрим случай, когда ротор
сельсина Д повернут относительно
исходного положения на угол
![]() ,
а ротор сельсина П — на угол
,
а ротор сельсина П — на угол
![]() .
Разность углов
.
Разность углов
![]() и
и
![]() определяет
угол рассогласования
определяет
угол рассогласования
![]() ,
т. е.
,
т. е.
![]() -
-
![]() =
=
![]() .
Если
.
Если
![]()
![]() 0,
то в соответственных фазах роторов
наводятся различные по величине э.д.с.
и в них возникают токи, которые,
взаимодействуя с магнитными полями,
создают вращающие моменты. Они направлены
в сельсинах таким образом, чтобы привести
угол рассогласования
0,
то в соответственных фазах роторов
наводятся различные по величине э.д.с.
и в них возникают токи, которые,
взаимодействуя с магнитными полями,
создают вращающие моменты. Они направлены
в сельсинах таким образом, чтобы привести
угол рассогласования
![]() к
нулевому значению.
к
нулевому значению.
Если ротор датчика поворачивать, то при
![]() =
0,75
=
0,75
![]() 2,5°
(в зависимости от класса точности
сельсинов) ротор приемника также начнет
поворачиваться и указанный угол
рассогласования будет оставаться
неизменным или даже несколько уменьшится
из-за уменьшения трения после трогания
с места. На практике очень часто от
одного датчика работает несколько
приемников, установленных в ряде пунктов.
2,5°
(в зависимости от класса точности
сельсинов) ротор приемника также начнет
поворачиваться и указанный угол
рассогласования будет оставаться
неизменным или даже несколько уменьшится
из-за уменьшения трения после трогания
с места. На практике очень часто от
одного датчика работает несколько
приемников, установленных в ряде пунктов.
При работе сельсинов в индикаторном режиме синхронный поворот или синхронное вращение передается обычно только на стрелку индикатора, посаженную непосредственно на вал сельсина-приемника. Здесь сельсин-приемник является в то же время исполнительным механизмом, требующим очень небольшого вращающего момента.
Если необходимо осуществить туже передачу, но к механизму, требующему относительно большого вращающего момента, то используется схема, представленная на рис. 3-117. На этой схеме показаны сельсины, не отличающиеся по устройству от ранее рассмотренных. Обмотка возбуждения сельсина-датчика (СД) подключается к источнику однофазного тока; его обмотка синхронизации СД соединяется с обмоткой синхронизации СП второго сельсина, который здесь работает в трансформаторном режиме как сельсин-трансформатор (СТ). Его обмотка СП является первичной обмоткой, а обмотка статора ВП — вторичной (выходной) обмоткой. Она через усилитель (У) соединяется с исполнительным двигателем (ИД), который работает на некоторую нагрузку. В то же время исполнительный двигатель через редуктор связан с валом СТ. Рабочий процесс элементов схемы протекает следующим образом.
При включенной обмотке ВД в фазах обмотки Сд наводятся э.д.с., которые создают токи в обеих обмотках синхронизации СД и СП. Токи в обмотке СП вызовут пульсирующую н.с. При показанном на рис. 3-117 положении роторных обмоток сельсинов относительно их статорных обмоток ось н.с. в сельсине СТ будет сдвинута на 90° по отношению к оси обмотки ВП и, следовательно, в этой обмотке никакой э.д.с. не возникнет.

Рис. 3-117. Схема соединения при трансформаторном режиме работы сельсина СТ.
Если теперь повернуть ротор сельсина СД на некоторый угол θ, то токи в фазах обмоток СД и СП изменяются и ось н.с. обмотки СП также повернется на угол θ. При этом на зажимах обмотки ВП возникнет напряжение, зависящее от угла θ. Оно непосредственно воздействует на усилитель У, выход которого соединен с исполнительным двигателем ИД. Двигатель ИД приводит в действие нагрузку и одновременно поворачивает ротор СТ в такое положение, при котором ось н.с. его обмотки СП снова будет сдвинута на 90° относительно оси обмотки ВП. Таким образом, нагрузочный механизм будет повторять повороты или вращение ротора СД. Исполнительный механизм и датчик СД не нуждаются в механической связи и могут быть расположены на большом расстоянии один от другого, причем линия связи Л здесь не требует больших затрат, так как передаваемая ею мощность (в соответствии с мощностью СД и СТ) весьма мала.
Если необходимо осуществить управление из двух пунктов, применяется дифференциальный сельсин. В отличие от ранее рассмотренных сельсинов он имеет на роторе и на статоре трехфазные обмотки и используется обычно в качестве приемника, а в качестве датчиков для него служат два однофазных сельсина (рис. 3-118).

Рис. 3-118. Схема управления дифференциальным сельсином-приемником ДС при помощи двух обычных сельсинов-датчиков Д1 и Д2.
Работа дифференциального сельсина протекает следующим образом.
Предположим, что ротор датчика D1
совершил поворот по часовой стрелке на
угол θ1. При этом ось н.с. обмотки
С1 и создаваемого ею потока
![]() также
повернется на угол θ1, но против
часовой стрелки. Поворачивая ротор
датчика D2 по
часовой стрелке на угол θ2, получим
поворот оси н.с. обмотки С2 и
создаваемого ею потока
также
повернется на угол θ1, но против
часовой стрелки. Поворачивая ротор
датчика D2 по
часовой стрелке на угол θ2, получим
поворот оси н.с. обмотки С2 и
создаваемого ею потока
![]() на
тот же угол θ2, но также против
часовой стрелки. Создается вращающий
момент, действующий таким образом, чтобы
магнитные потоки
на
тот же угол θ2, но также против
часовой стрелки. Создается вращающий
момент, действующий таким образом, чтобы
магнитные потоки
![]() и
и
![]() совпали
по направлению. Следовательно, ротор
дифференциального сельсина должен
повернуться на угол θ2 - θ1.
Если ротор датчика D2
повернут на угол θ2 против часовой
стрелки, то ротор дифференциального
сельсина поворачивается на угол, равный
сумме углов θ1 - θ2.
совпали
по направлению. Следовательно, ротор
дифференциального сельсина должен
повернуться на угол θ2 - θ1.
Если ротор датчика D2
повернут на угол θ2 против часовой
стрелки, то ротор дифференциального
сельсина поворачивается на угол, равный
сумме углов θ1 - θ2.
3-30. Переходные процессы в асинхронных машинах
Изменение режима работы асинхронной машины связано с переходными процессами, которыми сопровождается переход от одного установившегося режима ее работы к другому. Они характеризуются возникновением уравнительных токов и магнитных полей, постепенно затухающих до нулевых значений.
Переходные процессы в асинхронной машине значительно сложнее, чем в трансформаторе, так как одна из ее обмоток вращается относительно другой, при этом уравнительные токи и поля создают переменные вращающие моменты, которые воздействуют на ротор машины и вызывают изменение его частоты вращения. Они обычно исследуются приближенно при ряде допущений.
Мы здесь ограничимся только качественным рассмотрением некоторых переходных процессов в асинхронных машинах и приведем значения характеризующих их токов и моментов.
Рассмотрим процессы при включении.
Обратимся сначала к короткозамкнутому
двигателю. При его включении на
установившийся пусковой ток будет
накладываться свободный ток, который
приближенно можно считать апериодическим,
быстро затухающим до нуля. Свободный
ток будет наибольшим в одной из фаз
обмотки статора. В момент включения при
наиболее неблагоприятном случае он
равен амплитуде начального установившегося
тока
![]() .
Спустя приблизительно полпериода, он
складывается с установившимся пусковым
током. Тогда максимальное мгновенное
значение тока в фазе обмотки статора
получается примерно равным:
.
Спустя приблизительно полпериода, он
складывается с установившимся пусковым
током. Тогда максимальное мгновенное
значение тока в фазе обмотки статора
получается примерно равным:
![]() .
.
Так как у малых машин затухание свободного тока происходит значительно быстрее из-за относительно больших активных сопротивлений обмоток, то для них iмакс имеет меньшее значение.
При включении двигателей с контактными кольцами их обмотка ротора замкнута, как правило, на большое пусковое сопротивление. Поэтому здесь не получается больших бросков тока. Если же двигатель включается при разомкнутой обмотке ротора, то возникают процессы, аналогичные процессам при включении трансформатора, имеющего разомкнутую вторичную обмотку (§ 2-20,а). Магнитный поток, сцепляющийся с одной из фаз обмотки статора, в самом неблагоприятном случае может быть равен, спустя примерно полпериода после включения, 1,8 — 1,9 его номинального значения. При этом, учитывая насыщение стальных участков магнитной цепи, получим наибольший мгновенный ток в данной фазе, превышающий амплитуду номинального тока в 2 — 2,5 раза.
Следует также отметить, что после
включения короткозамкнутого двигателя
в нем наряду с установившимся пусковым
моментом возникают переменные переходные
моменты, которые, накладываясь на первый,
могут значительно повысить результирующий
момент в начальный период пуска. Они
возникают из-за наличия уравнительных
токов в обмотках и вызванных ими магнитных
полей. Наибольший результирующий момент
получается, примерно, спустя (0,6
![]() 0,8)
периода после включения, и может быть
больше установившегося начального
момента в 3 — 4 раза.
0,8)
периода после включения, и может быть
больше установившегося начального
момента в 3 — 4 раза.
Процессы при выключении двигателей также заслуживают внимания. В этом случае магнитная энергия, запасенная главным образом в воздушном зазоре, после быстрого отключения двигателя делается свободной и может вызвать в обмотках повышенные напряжения. Если роторная обмотка при выключении двигателя разомкнута, то магнитное поле быстро исчезает. Магнитная энергия переходит в тепловую в искровых промежутках между расходящимися контактами выключателя. Вследствие быстрого изменения потокосцеплений обмоток в них могут возникнуть опасные перенапряжения, особенно в случае мощных двигателей. Поэтому не следует двигатель с контактными кольцами выключать при разомкнутой обмотке ротора. Пусковой реостат, следовательно, должен выполняться так, чтобы роторная цепь не могла быть разомкнутой. При выключении короткозамкнутых двигателей магнитное поле исчезает относительно медленно, так как оно будет поддерживаться наведенными им токами в роторной обмотке. Перенапряжения здесь практически не возникают.
При коротком замыкании асинхронного двигателя также возникают переходные процессы, при которых получаются большие токи в обмотках и большие вращающие моменты. Здесь под коротким замыканием двигателя понимается случай, когда произошло внезапное короткое замыкание в сети, от которой двигатель получает питание. Наибольший мгновенный ток, получающийся в одной из фаз статора спустя приблизительно полпериода после короткого замыкания, достигает значения, в 1,2 — 1,35 раза превышающего значение амплитуды установившегося начального пускового тока. Возникающий при этом наибольший вращающий момент будет тормозящим, т. е. направленным против вращения ротора. Он примерно равен 2,3 — 2,7 Мнач.
Приведенные значения вращающих моментов, действующих на ротор и статор в начальные периоды переходных процессов, необходимо учитывать при конструировании двигателей. Момент, действующий на вал двигателя, зависит от отношения внешнего махового момента (GD2) рабочей машины к маховому моменту ротора двигателя. Он тем больше, чем больше это отношение.
3-31. Мощность машины, ее потери, частота вращения и размеры
Размеры машины, так же как и трансформатора, зависят от мощности
![]() .
(3-244)
.
(3-244)
Для э.д.с. мы можем написать:
![]() ,
(3-245)
,
(3-245)
где w — число витков фазы; Ф — магнитный поток; Вс — индукция в сечении Sc какого-либо участка магнитной цепи.
Для тока можем написать:
![]() ,
(3-246)
,
(3-246)
где
![]() —
плотность тока в проводнике, имеющем
сечение sn.
—
плотность тока в проводнике, имеющем
сечение sn.
Подставляя (3-245) и (3-246) в (3-244), получим:
![]() (3-247)
(3-247)
или, обозначая общее сечение меди всех витков через Sм = wsn,
![]() .
(3-248)
.
(3-248)
Обратимся к ряду геометрически, подобных машин возрастающей мощности, имеющих одинаковые индукции Вс и плотности тока . Под геометрически подобными машинами понимаются машины, соответственные размеры которых находятся в одном и том же отношении, так же как для геометрически подобных трансформаторов (§ 2-22). Для таких машин получим те же соотношения между их мощностью, весом, стоимостью и потерями, что и для трансформаторов [см (2-199), (2-200), (2-201)].
Нами рассматривался ряд геометрически подобных машин возрастающей мощности при постоянной частоте их вращения п (об/мин); для них мы можем, следовательно, принять, что вращающий момент М пропорционален мощности:
![]() .
(3-249)
.
(3-249)
Если рассматривать те же машины с различными частотами вращения, то их мощность пропорциональна Мп, т. е.
![]() .
(3-250)
.
(3-250)
Последнее соотношение показывает, что при одинаковых геометрических размерах и электромагнитных нагрузках Вс и мощность машины пропорциональна частоте вращения. Следовательно, машины имеют тем меньшие размеры и стоимость, чем больше их частота вращения (в известных пределах, так как нужно считаться с механической прочностью вращающихся частей машины).
Полученные соотношения на практике оправдываются лишь с некоторым приближением. Для машин от них приходится еще больше отступать, чем для трансформаторов. Однако они дают правильную общую ориентировку при определении зависимости мощности и потерь машины от ее размеров и частоты вращения.
Связь между главными размерами электрической машины, ее мощностью, частотой вращения и основными электромагнитными нагрузками может быть установлена на основе приведенных далее соотношений.
Главными размерами электрической машины называются внутренний диаметр статора D и его расчетная длина lδ = l1 - nвbв, где l1 — полная длина статора; nв — число радиальных вентиляционных каналов; bв = 1 см — ширина канала. Основными электромагнитными нагрузками являются: линейная нагрузка А и максимальная индукция в воздушном зазоре Вδ.
Расчетная мощность машины, от которой зависят ее главные размеры, кВт,
![]() .
(3-251)
.
(3-251)
Если сюда подставить э.д.с., B, Е1 = 4,44f1k01w1Ф·10-3, заменив здесь f1, Гц, и Ф, Мкс, на их значения:
![]() ;
;
![]()
где полюсное деление, см,
![]() ,
,
и учесть, что линейная нагрузка, А/см,
A =
![]()
то получим:
![]() ,
(3-252)
,
(3-252)
где
![]() 0,67
0,67
![]() 0,72
— расчетный коэффициент полюсного
перекрытия, А = 200
0,72
— расчетный коэффициент полюсного
перекрытия, А = 200
![]() 450
A/см и Вδ = 6
500
450
A/см и Вδ = 6
500
![]() 8
200 Гс при Рн = 0,4
8
200 Гс при Рн = 0,4
![]() 1
000 кВт (для двухполюсных машин А надо
уменьшить на 15
1
000 кВт (для двухполюсных машин А надо
уменьшить на 15![]() 20%,
а Bδ — на 10
20%,
а Bδ — на 10![]() 15%);
k01
15%);
k01
![]() 0,96
0,96
![]() 0,90
— обмоточный коэффициент.
0,90
— обмоточный коэффициент.
Из (3-252)
можно видеть, как зависят главные размеры
машины от мощности, частоты вращения и
электромагнитных нагрузок А и Вδ.
При определении Р' значения ηн
и cosφн вначале
приходится выбирать в зависимости от
мощности Рн и числа пар полюсов
р по данным выполненных машин (рис
3-119—3-122);
kE
= 0,97
![]() 0,92
соответственно при p
=1
0,92
соответственно при p
=1![]() 6.
6.
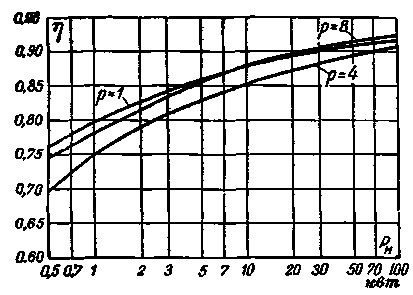
Рис. 3-119. Коэффициент полезного действия
![]() трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.
трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.

Рис. 3-120. Коэффициент полезного действия
![]() трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.
трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.

Рис. 3-121. Коэффициент мощности
cos![]() трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.
трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.

Рис. 3-122. Коэффициент мощности
cos![]() трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.
трехфазных
асинхронных двигателей в зависимости
от номинальной мощности Рн.
3-32. Коэффициент полезного действия и cosасинхронных двигателей
Ранее рассматривались потери, возникающие в машине при ее работе. Приведем здесь относительные значения этих потерь для наиболее часто применяемых на практике нормальных асинхронных двигателей мощностью от 0,6 до 100 кВт при их номинальной нагрузке (с повышением номинальной мощности они уменьшаются).
Электрические потери в обмотке статора,
отнесенные к номинальной мощности
![]() приближенно
равны:
приближенно
равны:
7
![]() 2,5%
при 2p = 4 и 2p
= 6;
2,5%
при 2p = 4 и 2p
= 6;
7,5
![]() 2,5%
при 2р = 8.
2,5%
при 2р = 8.
Электрические потери в обмотках ротора примерно такие же, как в обмотках статора. В тех же пределах приблизительно колеблются значения скольжения s%.
Потери в стали статора Pс1 и потери от пульсаций поля в зубцах статора и ротора Pс.д, вызванные наличием пазов на статоре и роторе, составляют:
![]()
![]() .
.
Механические потери (потери на трение) Рмех зависят от частоты вращения и диаметра ротора, примененной системы вентиляции, типа подшипников. Они составляют:
![]() .
.
Добавочные потери Рдоб, возникающие при нагрузке, вызваны полями рассеяния и не могут быть достаточно точно рассчитаны или определены опытным путем. Их оценивают в 0,5% от подведенной к двигателю мощности P1н при номинальной нагрузке на валу.
Однако, как показывает опыт, они в
современных короткозамкнутых двигателях
при алюминиевой обмотке на роторе
достигают 1
![]() 1.5%
от Р1н.
1.5%
от Р1н.
Коэффициенты полезного действия современных двигателей достигают высоких значений. Они соответствуют кривым, приведенным на рис. 3-119 и 3-120. Электрические машины обычно рассчитываются таким образом, чтобы их к. п. д. был наибольшим при номинальной мощности или близкой к ней. Важной величиной, характеризующей работу двигателя, является его cos φ.
Размеры и стоимость генераторов
электрических станций, трансформаторов,
электрических сетей и аппаратуры зависят
от произведения mUI, а
их использование — от произведения
mUIcos φ.
Отсюда понятно, почему повышение cos φ
представляет собой задачу, имеющую
большое народнохозяйственное значение.
Прежде всего стремятся повысить cos φ
асинхронных двигателей, так как в
электрических установках они являются
основными потребителями реактивного
тока. Реактивный ток, потребляемый
двигателем, идет главным образом на
создание основного магнитного поля. Он
мало отличается от тока холостого хода.
Поэтому для улучшения cos φ
двигателя нужно уменьшить его ток
холостого хода, что достигается путем
уменьшения воздушного зазора δ между
статором и ротором. При этом снижается
магнитное сопротивление для главного
потока Ф, и, следовательно, для его
создания требуется меньший реактивный
(намагничивающий) ток. Однако при выборе
δ приходится считаться с необходимостью
получить механически надежную машину,
изготовление и установка которой не
вызывают больших затруднений. Вследствие
этого для δ существует некоторое
минимальное значение, ниже которого не
следует спускаться. Для машин различной
мощности δ = 0,2
![]() 1,5
мм (см. §
3-16, табл.
3-4).
1,5
мм (см. §
3-16, табл.
3-4).
При проектировании асинхронных двигателей большое внимание уделяется вопросу получения высокого соs φ. В этом отношении заводы Советского Союза имеют большие достижения: выпускаемые ими в настоящее время нормальные асинхронные двигатели имеют высокие значения соs φ. На рисунках 3-121 и 3-122 приводятся значения соs φ при номинальной мощности на валу. При меньших нагрузках соs φ снижается (рис. 3-54), так как при этом активная составляющая тока уменьшается, тогда как его реактивная составляющая остается почти без изменения. Поэтому для электропривода следует выбирать двигатель так, чтобы он работал по возможности с номинальной нагрузкой.
3-33. Современные асинхронные машины
Конструкции и характеристики асинхронных двигателей, выпускаемых заводами Советского Союза, вполне определяют современное состояние электромашиностроения в данной области.
Ранее отмечалось, что асинхронные двигатели являются наиболее распространенными электрическими машинами. В СССР годовой выпуск таких машин по мощности составляет около 15 млн. кВт и в 1965 г. должен составить около 35 млн. кВт. Поэтому их проектированию и изготовлению всегда уделялось и уделяется большое внимание. Массовое изготовление машин требует особенно тщательной разработки их конструкции и технологических методов производства. Большое значение при этом получают вопросы унификации и нормализации деталей и целых конструктивных узлов, их взаимозаменяемости. В связи с этим целесообразно создание серий машин, т. е. рядов машин возрастающей мощности, объединенных общностью конструкции и технологических методов производства и предназначенных для массового изготовления.
Задача проектирования и изготовления серий электрических машин может быть правильно разрешена только в условиях планового социалистического хозяйства. Только при таких условиях возможно создание единых серии электрических машин для всех отечественных заводов, изготовление которых дает большие экономические выгоды и вместе с тем обеспечивает их высокие эксплуатационные свойства.
Единые серии асинхронных двигателей, изготовляемых на заводах Советского Союза, охватывают мощности от долей ватта до нескольких тысяч киловатт и различные частоты вращения. Они строятся на номинальные напряжения 127, 220, 380, 500, 660, 3000, 6000 и 10000 В.
Основной серией трехфазных асинхронных двигателей массового применения является серия А. (Выбор обозначения для серии маши (в данном случае А) совершенно произволен. Так, например, серии асинхронных машин небольшой мощности, выпускавшихся заводами Советского Союза примерно до 1950 г., имели обозначения АД, МА и др.) В нее входят двигатели мощностью от 0,6 до 125 кВт. На базе серии А разработаны различные модификации: двигатели с повышенным пусковым моментом, с повышенной способностью к перегрузке по моменту, с повышенным скольжением, с контактными кольцами и др. На рис. 3-123 представлен двигатель серии А.

Рис. 3-123. Двигатель серии А с фланцем для крепления.
Все двигатели этой серии выполняются с короткозамкнутой алюминиевой клеткой на роторе. Общепринятой конструкцией для них является защищенная конструкция, при которой исключается попадание в машину капель воды, падающих сверху или под углом 45° к горизонтали. Двигатели серии А имеют корпус и подшипниковые щиты, выполненные из чугуна или при малых мощностях из алюминиевого сплава. В последнем случае они обозначаются как серия АЛ.
На рис. 3-124 представлен двигатель серии АО. Двигатели этой серии имеют закрытую конструкцию с обдувом внешней ребристой поверхности корпуса статора, который осуществляется при помощи вентилятора. Последний помещен на валу двигателя между внутренним щитом, закрывающим ротор двигателя, и внешним щитом с отверстиями для прохода воздуха. Малые двигатели закрытой конструкции с обдувом внешней поверхности корпуса статора делаются также с корпусом статора и щитами из алюминия. Они входят в серию АОЛ. Заводами выпускаются также двигатели серии АК — двигатели с контактными кольцами мощностью до 125 кВт (рис. 3-125).

Рис. 3-124. Двигатель серии АО.

Рис. 3-125. Двигатель серии АК (справа виден кожух, закрывающий контактные кольца).
В настоящее время заводы Советского Союза начинают выпускать двигатели мощностью от 0,4 до 125 кВт новых серий, которые обозначены А2 и АО2. Эти двигатели по сравнению с двигателями серий А и АО легче по весу, имеют изоляцию статорных обмоток более высоких классов.
Двигатели большой мощности (от 140 до 1 250 кВт) с фазным ротором (с контактными кольцами) объединены в серию ФАМСО. Они изготовляются для эксплуатации в угольной и нефтяной промышленности, для нужд электростанций и других областей народного хозяйства. Эти двигатели имеют защищенную конструкцию с самовентиляцией, как и большинство асинхронных двигателей. Подвод воздуха здесь осуществляется через отверстия, расположенные в нижних частях подшипниковых щитов, выход воздуха — через боковые закрытые жалюзи отверстия с обеих сторон корпуса статора.
На те же мощности строятся короткозамкнутые двигатели с двойной клеткой или бутылочными пазами на роторе, объединенные в серию ДАМСО (рис. 3-126), а также с глубокими пазами на роторе серии ГАМ. Они находят себе применение в тех же случаях, что и двигатели ФАМСО. Двигатели предназначены для работы в тяжелых условиях: прямой пуск при полном напряжении, реверсирование, торможение (на рис. 3-127 представлен продольный разрез одного из современных двигателей с контактными кольцами).
В СССР разработаны также двигатели на мощности от 125 до 1000 кВт, которые объединены в новые серии А и АК. Многие типы этих двигателей уже выпускаются заводами взамен двигателей ДАМСО, ГАМ и ФАМСО.
Отечественными заводами выпускаются тихоходные двигатели большой мощности (на тысячи киловатт) для нужд угольной, металлургической и других отраслей промышленности, а также быстроходные двигатели при синхронной частоте вращения 3000, 1500 об/мин на мощности в несколько тысяч киловатт, которые предназначаются для мощных вентиляторов.
Большое количество асинхронных двигателей особой конструкции выпускается для текстильной, деревообрабатывающей и станкостроительной промышленности. Они часто имеют специальные характеристики: большой начальный пусковой момент, повышенную способность к перегрузке по моменту, повышенное скольжение.
В последние годы созданы отдельные типы небольших двигателей на очень большие частоты вращения. Такие двигатели получают питание от высокочастотных генераторов переменного тока. Статор их выполняется с обычной трехфазной обмоткой, ротор — в виде цельного стального цилиндра, причем для него берется сталь весьма высокого качества, так как даже при малом диаметре ротора его окружная скорость достигает 200 — 250 м/сек. Вращающий момент двигателя создается в результате взаимодействия вращающегося поля и токов, наведенных им в стали ротора. Эти токи вытесняются к внешней поверхности ротора и протекают в тонком поверхностном слое его, вследствие чего индуктивное сопротивление рассеяния контуров токов ротора имеет малое значение. Вытеснение токов обусловлено их большой частотой: например, при f = 2000 Гц и s = 0,08 получим: f2 = sf1 = 160 Гц. При f1 = 2000 Гц и s = 0,08 двухполюсный двигатель будет вращаться с частотой 110 400 об/мин. Указанные двигатели применяются при тонкой шлифовке металлических изделий и для других целей.

Рис. 3-126. Короткозамкнутый двигатель с двойной клеткой на роторе серии ДАМСО.

Рис. 3-127. Трехфазный асинхронный двигатель с контактными кольцами.