

7.4. Способы регулирования частоты в энергосистеме
Регулирование частоты первичными регуляторами частоты вращения турбин
Этот способ является простейшим. Частоту регулируют все генераторы электростанций энергосистемы, оснащенные РЧВ со статическими характеристиками.
Зная, что коэффициент статизма РЧВ составляет примерно 6 % (0,06), и принимая допустимое отклонение частоты от номинальной по ГОСТ Af=0,2 Гц (0,004), можно приблизительно определить пределы изменения нагрузки, при которых РЧВ обеспечивают автоматическое поддержание частоты с отклонениями, не превышающими допустимых пределов. Из выражения (7..3) следует
![]()
Поскольку действительные изменения нагрузки в энергосистеме, как было показано выше (см. рис. 7.1), значительно превышают полученное значение, тр, следовательно, первичные регуляторы не могут обеспечить поддержание частоты в требуемых пределах без вмешательства оперативного персонала.
Наиболее доступным способом регулирования частоты с участием оперативного персонала является периодическое восстановление частоты путем смещения им характеристик первичных регуляторов на одной из электростанций (обычно гидростанции), специально выделенной для регулирования частоты в энергосистеме. При необходимости, исходя из экономических и других соображений, регулирование частоты может передаваться другим электростанциям. •
Основным недостатком такого полуавтоматического регулирования частоты является необходимость постоянного контроля со стороны диспетчера энергосистемы за колебаниями частоты, суммарной нагрузкой энергосистемы и величиной резерва мощности (регулировочного диапазона) на регулирующей электростанции.
Регулирование частоты с помощью вторичных автоматических регуляторов частоты
Вторичные автоматические регуляторы частоты (АРЧ) измеряют с достаточной точностью отклонения частоты от номинального значения и вырабатывают управляющие команды. . .
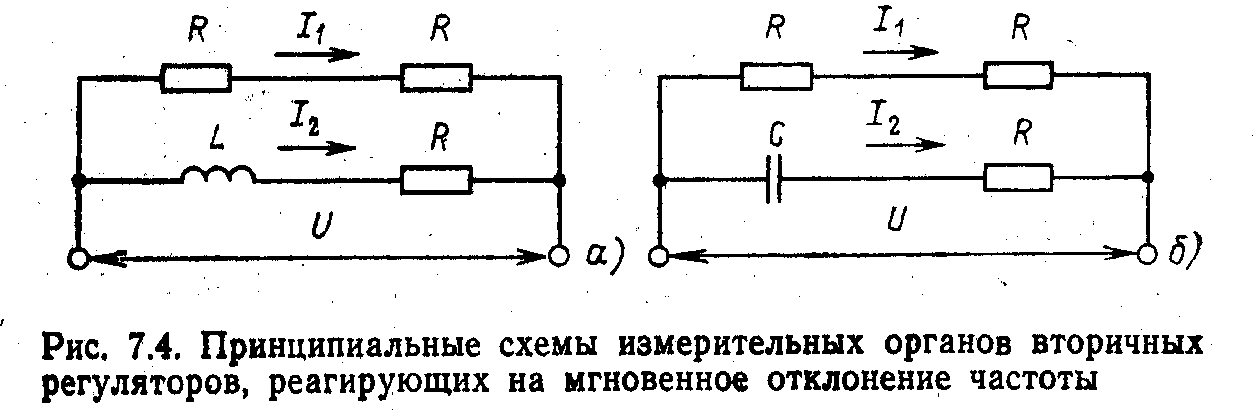
На рис. 7.4 представлены схемы наиболее простых измерительных органов АРЧ, реагирующих на мгновенные отклонения частоты. Схемы представляют собой контуры из параллельно включенных активного сопротивления и индуктивности (рис. 7.4, а) или емкости (рис. 7.4,6).
Контур настроен так, что при номинальной частоте сети токи /t и h равны по значению. При понижении или повышении частоты сети вследствие изменения **. или хс равенство токов нарушается. В результате в зависимости от значения и знака отклонения частоты сети изменяется фаза тока на выходе контура, что и используется как признак отклонения частоты от номинального значения.
В других схемах используются резонансные контуры с параллельным включением L и С, а также фазочувствительные, фильтровые и балансные схемы. Кроме АРЧ, реагирующих на мгновенные отклонения частоты, используются также АРЧ, измерительные органы которых вырабатывают на своем, выходе сигнал, пропорциональный интегралу отклонения частоты за заданный промежуток времени.
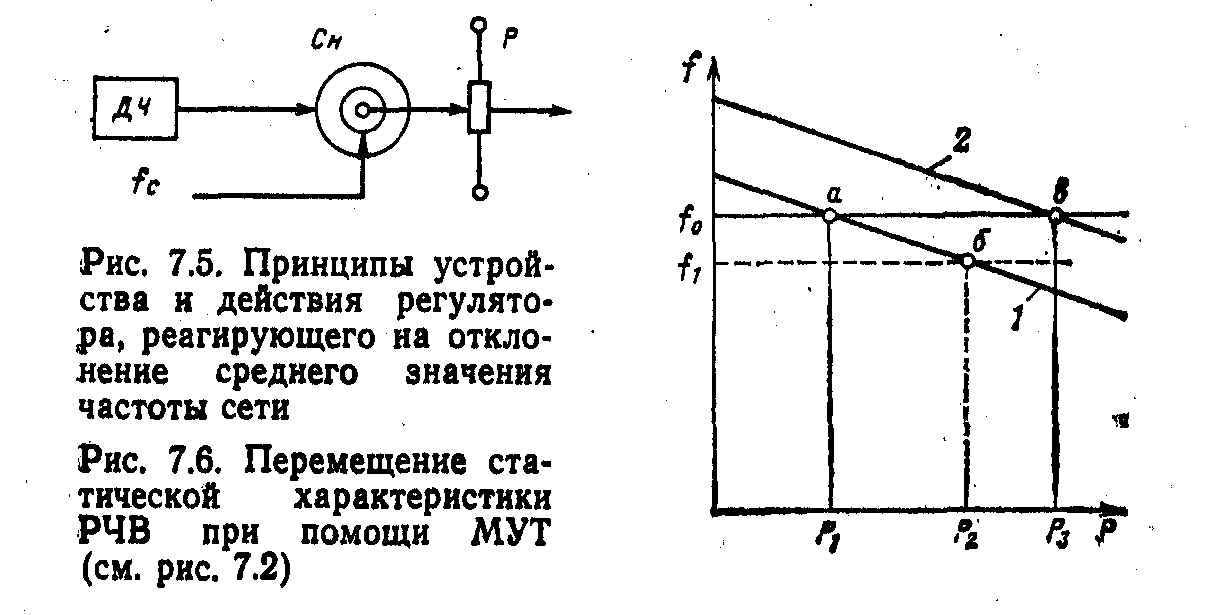
Интегратор аналогового типа выполняется на базе сельсина Сн, как упрощенно показано на рис. 7.5. К сельсину подводятся напряжение сети, частота fe которой регулируется, и напряжение от специального датчика эталонной частоты ДЧ, вырабатывающего и точно поддерживающего частоту 50 Гц.
При равенстве частот датчика и сети сельсин неподвижен, а при отклонении частоты сети в ту или иную сторону ротор сельсина приходит во вращение также в одну или другую сторону и перемещает движок реостата Р, с которого снимается напряжение, пропорциональное интегралу отклонения частоты. При регулировании с помощью такого АРЧ обеспечивается поддержание на заданном уровне среднего значения частоты.
Управляющие команды АРЧ производят смещение характеристик первичных регуляторов (рис. 7.6). Так, если при /о генератор работал с нагрузкой Ри чему соответствовала точка о.на характеристике 1, то при понижении частоты до /i генератор увеличил бы нагрузку до Pi, которой на характеристике I соответствует точка б. Для того чтобы восстановить нормальную частоту, "АРЧ, воздействуя на механизм управления турбиной- (см, блок 4 на рис. 7.2), передвигает характеристику первичного регулятора в положение 2, пока частота вновь не станет номинальной (точка в). При этом нагрузка генератора возрастет до Рз. Интенсивность команд от АРЧ пропорциональна отклонению частоты, а знак соответствует знаку отклонения.
Автоматический регулятор частоты 'имеет астатическую характеристику и воздействует на агрегаты электростанции, выделяемой для регулирования частоты в энергосистеме. Недостатком воздействия только на одну регулирующую электростанцию является необходимость обеспечения регулировочного диапазона на этой одной электростанции, что практически возможно при наличии в энергосистеме достаточно мощной гидростанции. При недостаточном регулировочном диапазоне . на одной электростанции АРЧ может воздействовать одновременно на две и более электростанций, используя для этой цели специальные каналы телерегулирования.
Автоматическое регулирование частоты должно осуществляться так, чтобы при этом обеспечивалась также наиболее экономичная работа электростанций и энергосистемы в целом. Одним из основных условий получения максимальной экономичности является наивыгоднейшее распределение нагрузки между агрегатами электростанции или между электростанциями энергосистемы, обеспечивающее наименьшие расход условного топлива и потери мощности в электрической сети.
Выполнение первого условия достигается тем, что при понижении частоты в первую очередь загружаются наиболее экономичные, а при повышении частоты разгружаются наименее экономичные агрегаты или электростанции. Это требование относится к агрегатам одной электростанции и к электростанциям, связанным короткими сетями, потери мощности в которых не оказывают существенного влияния на экономичность энергосистемы в целом.
Если же электростанции связаны сетями большой протяженности, то должно быть обеспечено выполнение также и второго условия. Для этого загрузка и разгруз-
ка электростанций при регулировании частоты должны производиться не только с учетом их экономичности, но также с учетом потерь мощности в сети.
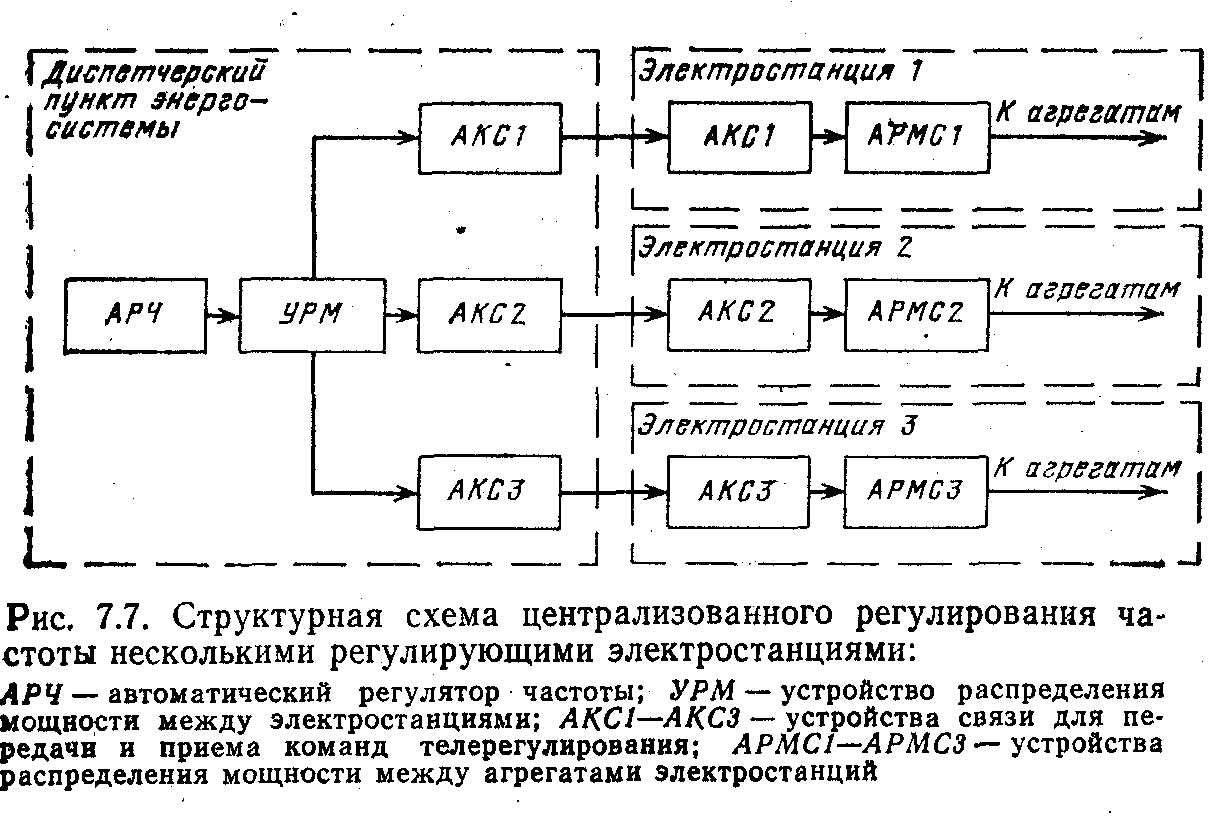
Для выполнения указанных требований применяются специальные устройства распределения мощности (УРМ) разных типов, которые распределяют общее задание между электростанциями в соответствии с заранее рассчитанным для них долевым участием (рис. 7.7). На регулирующих электростанциях также устанавливаются устройства для распределения задания между агрегатами. Такая система регулирования частоты называется централизованной./
В современных энергосистемах при регулировании частоты или перетоков мощности (см. ниже) воздействие на изменение мощности генераторов или электростанций в целом производится через автоматические регуляторы мощности электростанции (АРМС) и энергоблоков (АРМБ).
Как показано на структурной схеме ряс. 7.8, АРМС воспринимает задания на изменение мощности электростанции от регуляторов частоты (АРЧ), перетока мощности (АРПМ), ограничителя перетока мощности

(АОПМ),и от ручного задатчика внеплановой мощности (РЗВН) и распределяет суммарное задание между энергоблоками в заранее заданном долевом участии по их экономическим характеристикам.
Устройства АРМБ, получая задание от АРМС и ручного задатчика плановой мощности РЗПН, вырабатывают суммарное воздействие на регуляторы нагрузки турбин РНТ! и котлов РНК и через них на изменение мощности турбогенератора и котла. Изменение мощности прекращается, когда фактическая нагрузка генератора, контролируемая датчиком мощности ДМ, становится равной заданию. Эту мощность поддерживает АРМБ неизменной до тех пор, пока не изменится задание. Поэтому для того чтобы АРМБ не препятствовал изменению мощности при аварийном повышении или понижении частоты, используется частотный корректор ЧК, который при значительном отклонении частоты подает на АРМБ дополнительное задание на соответствующее изменение мощности энергоблока. Гидростанции оснащаются устройствами группового управления мощностью, выполняющими аналогичные функции.
7.5. АВТОМАТИЧЕСКОЕ РЕГУЛИРОВАНИЕ ПЕРЕТОКОВ МОЩНОСТИ
При максимальной загрузке межсистемных и внутрисистемных линий электропередачи их надежная работа Обеспечивается с помощью устройств автоматического регулирования перетоков активной мощности (АРПМ). Наилучшие результаты достигаются при так называемом балансирующем действии АРПМ (рис. 7.9).
Так, если переток мощности, направленный из энергосистемы / в энергосистему //, превышает уставку устройства АРПМ, последнее воздействует одновременно на уменьшение мощности электростанций энергосистемы / и увеличение мощности электростанций энергосистемы II. При таком действии АРПМ частота в энергосистемах остается неизменной, а следовательно, остаются неизменными перетоки мощности по другим линиям электропередачи.
Основным органом устройства АРПМ является измерительный НО, который подключен к датчику мощности ДМ (рис. 7.10). Датчики мощности выполняются на статических элементах, используемых также в устройствах телеизмерения мощности. Измерительный орган НО сопоставляет фактическую мощность, передаваемую по линий электропередачи, с уставкой, задаваемой устройством ЗУ, и создает на своем выходе напряжение, которое пропорционально отклонению перетока мощности, а знак соответствует знаку отклонения. Выходное напряжение обычно усиливается усилителем мощности УМ

Различают два способа выявления изменения перетоков мощности: по мгновенному и по интегральному отклонению. В АРПМ по мгновенному отклонению напряжение, полученное на выходе усилителя мощности, поступает в распределитель мощности УРМ, в котором формируются задания и соответствующие команды на регулирующие электростанции.
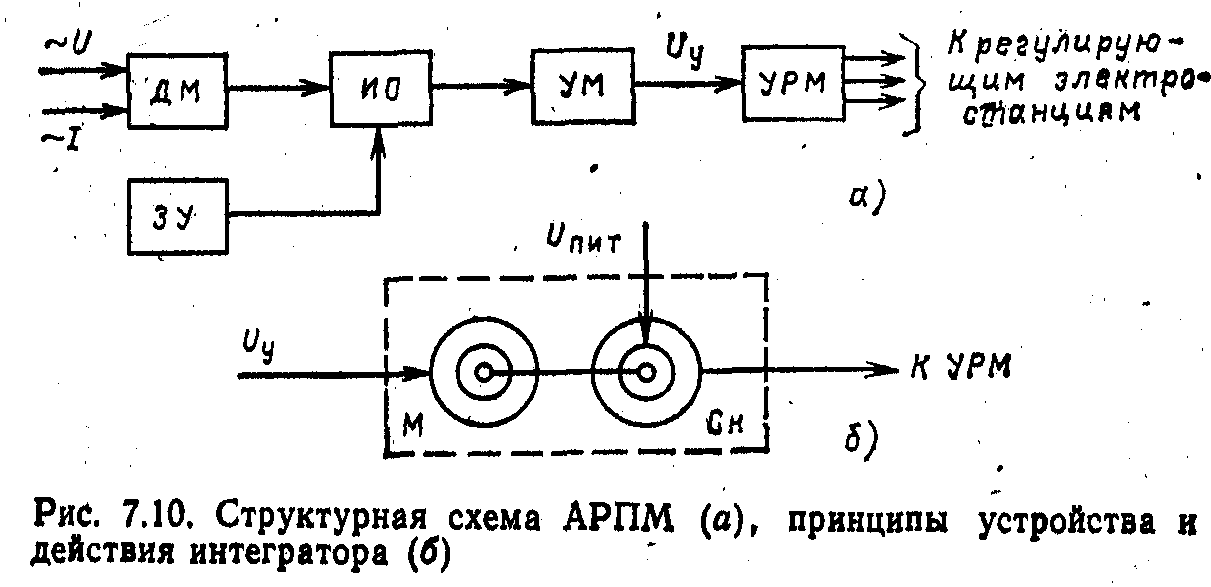
В АРПМ по интегральному отклонению напряжение, полученное на выходе усилителя мощности, поступает в интегратор (рис. 7.10,6), который состоит из микродвигателя М и сельсина Сн. При появлении напряжения на выходе усилителя Uy электродвигатель приходит во вращение и начинает поворачивать ротор сельсина, к которому подведено напряжение питания £/Ппт. В результате на статоре сельсина появляется напряжение, пропорциональное углу поворота ротора, а следовательно, и интегралу отклонения перетока (между электродвигателем ротором сельсина имеется механический редуктор). Это напряжение поступает в распределитель мощности УРМ. .
' Регулятор перетока АРПМ возвращает переток мощности к заданной уставке при его отклонении от уставки как в сторону увеличения, так и в сторону уменьшения. Однако в ряде случаев имеется необходимость регулировать переток мощности только в сторону уменьшения, т. е. ограничивать его максимальное значение. В этих случаях АРПМ выполняется для работы в режиме ограничения и соответственно называется автоматическим ограничителем перетока мощности. Автоматическое ограничение перетока мощности обычно осуществляется с большим быстродействием, чем регулирование перетока.