

7.2 Интегрированные измерительные оболочки
Данные оболочки предназначены для управления приборами и встраиваемыми платами ввода-вывода аналоговых сигналов, сбора, анализа и визуального представления измерительной информации.
Функции создаваемой прикладной задачи описываются путем графической компоновки блочной диаграммы, отображающей процессы получения обработки и представления измерительной информации. Диаграмма составляется из совокупности программных функциональных блоков, называемых виртуальными инструментами, которые реализуют широкий набор функций: от простых арифметических вычислений до сложнейших алгоритмов сбора, обработки и визуального представления данных, преобразования их форматов и передачи по компьютерной сети.
В зависимости от полноты реализуемых функций эти программные продукты могут быть условно разделены на оболочки большой, средней и малой мощности.
7.3 Проблемно – ориентированные оболочки
Данные оболочки - особый класс измерительных оболочек, предназначенных для решения ограниченного круга задач: эмулирования виртуальных цифровых запоминающих осциллографов, температурных измерений и т.п.
7.4 Прикладные проблемно – ориентированные пакеты
Функциональные возможности сетевых суперсред и интегрированных оболочек могут быть существенно расширены путем подключения к ним прикладных проблемно ориентированных пакетов, которые содержат готовые подпрограммы, реализующие определенный набор функций, и поставляются либо в виде библиотек динамической компоновки (DLL-библиотек), либо как обычные подключаемые библиотеки.
7.5 Инструментальные пакеты
Данные пакеты представляют собой программные средства для развития интегрированных измерительных сред и оболочек. Их условно можно разделить на инструментальные пакеты:
- расширяющие программные возможности системы и предназначенные для разработки новых подпрограмм и объектов, функционирующих под управлением данной оболочки;
- расширяющие аппаратные функции системы, рассчитанные на разработку новых драйверов устройств, не поддерживаемых в настоящее время данной оболочкой.
7.6 БИБЛИОТЕКИ ДРАЙВЕРОВ
Драйверное ПО работает на системном уровне, так что управлять приборами и получать данные от них можно непосредственно из программ, написанных на языках высокого уровня.
Каждый из драйверов устройств имеет унифицированный прикладной программный интерфейс (API), что исключает необходимость изменения прикладных программ при переходе на другую платформу или операционную систему.
7.7 ЭКСПЕРТНЫЕ СИСТЕМЫ
При решении задач мониторинга и управления сложными промышленными объектами и процессами сетевые суперсреды и интегрированные оболочки могут дополняться экспертными системами, обеспечивающими мощную инструментальную поддержку принятия решений в конкретной предметной области.
7.8 ИНТЕРАКТИВНЫЕ ПРОБЛЕМНО – РЕШАЮЩИЕ СРЕДЫ
Эти среды предназначены для решения прикладных и научно-технических задач и могут использоваться самостоятельно или для расширения интегрированных измерительных оболочек.
8. ИНТЕРПОЛЯЦИЯ И ЭКСТРАПОЛЯЦИЯ.
При заданном шаге дискретизации погрешность восстановления функции будет зависеть от способа ее восстановления (приближения).
В данной постановке задачи неопределенным является понятие "отклонение" между исходной и восстановленной функциями, которое оценивается максимальным значением разности восстановленной Y(t) и исходной X(t) функций, т.е. величиной
= max |Y(t) - X(t)|.
В
этом случае решается задача так
называемого равномерного приближения
функции. Иногда предъявляется
дополнительное требование, чтобы в
точках отсчета (узлах аппроксимации)
погрешность восстановления была равна
нулю. 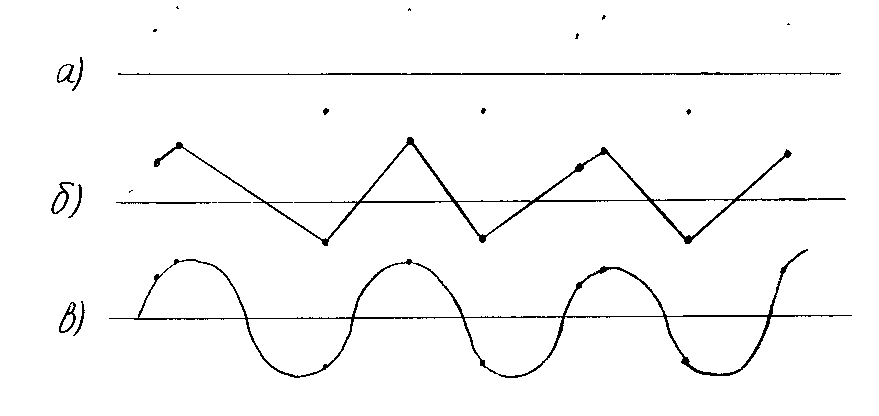 Рис.
41. Методы интерполяции: а
- измеренные значения до интерполяции,
б
- линейная интерполяция, в
- синусоидальная интерполяция.
Рис.
41. Методы интерполяции: а
- измеренные значения до интерполяции,
б
- линейная интерполяция, в
- синусоидальная интерполяция.
Способ восстановления непрерывной функции определяется главным образом видом используемых воспроизводящих функций, которые, с одной стороны, должны обеспечивать необходимую точность воспроизведения, а с другой стороны, допускать простую техническую реализацию устройств, производящих функции.
Требованию простоты реализации процессов дискретизации и восстановления прежде всего отвечают степенные полиномы. Наиболее часто в практике используются полиномы нулевого и первого порядков.
Интерполяционной формулой Лагранжа можно пользоваться для восстановления при неравномерной дискретизации. При равномерной дискретизации (t=const) удобнее пользоваться интерполяционной формулой Ньютона.
Наибольшее распространение при восстановлении непрерывных функций получили следующие частные случаи интерполяции. Ступенчатая интерполяция, практически представляющая собой экстраполяцию от точки tо до точки t1. При линейной интерполяции точки соединяются прямыми линиями. Этот метод хорош для импульсных сигналов или меандра.
Синусоидальная интерполяция дает гораздо лучшее совпадение для синусоидальных процессов или прямоугольного сигнала.
Линейная интерполяция значительно точнее, чем ступенчатая, а использование полинома второго порядка уже не дает существенного выигрыша в точности по сравнению с полиномами первого порядка.
При равномерной дискретизации погрешность восстановления может достигать установленного предела только в отдельные, сравнительно редкие моменты времени. Если искусственно увеличить число таких моментов, то это приведет к сжатию измерительной информации. Сжатие измерительной информации усложняет структуру и алгоритм функционирования системы.
Эффективность адаптивной дискретизации можно повысить, если применить восстанавливающую функцию вида
Yi (t) = X (ti) + доп при ti < t < t(i+1)
При адаптивной дискретизации с кратными интервалами при использовании полиномов нулевого или первого порядков из всех отсчетов непрерывной функции X(t), взятых с шагом t, отобраны отсчеты, с погрешностью, не превышающей доп . В случае, когда допустима задержка сигнала, более эффективными оказываются интерполяционные алгоритмы.
Еще более высокий коэффициент сжатия достигается в более сложных алгоритмах адаптивной дискретизации, совмещающих экстраполяцию и интерполяцию.