

3.11 План ускорений
|
План ускорений – это графическое изображение векторов ускорений точек плоской фигуры в фиксированный момент ее движения. |
В качестве примера приведем построение плана ускорений шатуна кривошипно-шатунного механизма в предположении, что кривошип ОА вращается с постоянной угловой скоростью ω1, а ползун В движется по горизонтали (рис. 3.25,а).
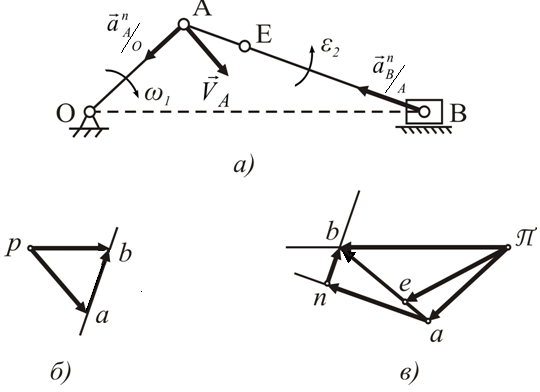
Рисунок 3.25
Сначала
построим план скоростей, как показано
в п. 3.6, реализуя построение формулы
![]() :
из полюса плана скоростей,
точкир (рис. 3.25,б),
отложим в масштабе вектор скорости
точки А
:
из полюса плана скоростей,
точкир (рис. 3.25,б),
отложим в масштабе вектор скорости
точки А
![]() .
.
Затем
из точки а
проведем линию перпендикулярно АВ
(это скорость
![]() ),
а из полюса р
проведем линию, параллельную скорости
точки В
(по горизонтали движется точка В).
Точку пересечения двух последних прямых
обозначим b
(рис. 3.25,б).
Вектор
),
а из полюса р
проведем линию, параллельную скорости
точки В
(по горизонтали движется точка В).
Точку пересечения двух последних прямых
обозначим b
(рис. 3.25,б).
Вектор
![]() равен скорости точкиВ:
равен скорости точкиВ:
![]() .
Отношение
.
Отношение![]() равно угловой скорости звенаАВ
(ω2)
равно угловой скорости звенаАВ
(ω2)
 . (3.22)
. (3.22)
Построим план ускорении , воспользовавшись векторной формулой (3.15) для определения ускорения точки В:
![]() .
(3.23)
.
(3.23)
Величина и
направление ускорения точки А
нам известны, т.к. точка А
принадлежит кривошипу ОА,
который вращается с постоянной
скоростью ω1,
поэтому
![]() .
Направлен этот вектор от точкиА
к точке О.
Ускорение нормальное при вращении звена
АВ
вокруг полюса А
тоже известно:
.
Направлен этот вектор от точкиА
к точке О.
Ускорение нормальное при вращении звена
АВ
вокруг полюса А
тоже известно:
![]() и направлено от точкиВ
к точке А.
и направлено от точкиВ
к точке А.
Таким
образом, в формуле (3.23) имеем два вектора:
![]() и
и![]() ,
величины которых неизвестны, но
известны прямые, на которых они
расположены:
,
величины которых неизвестны, но
известны прямые, на которых они
расположены:
– вектор
![]() направлен по горизонтали (точка В
движется по горизонтали);
направлен по горизонтали (точка В
движется по горизонтали);
– вектор касательного
ускорения
![]() при вращении звена АВ
вокруг полюса А,
перпендикулярный к АВ,
а по величине неизвестный, т.к. угловое
ускорение звена АВ
(ε2)
неизвестно.
при вращении звена АВ
вокруг полюса А,
перпендикулярный к АВ,
а по величине неизвестный, т.к. угловое
ускорение звена АВ
(ε2)
неизвестно.
![]() .
.
Для геометрической
интерпретации формулы (3.23) выбираем
масштаб ускорений µа
и полюс плана
ускорений (точку П)
(рис. 3.25,в).
Отложим вектор ![]() ;
из конца а
этого вектора откладываем второе
слагаемое формулы (3.23)
;
из конца а
этого вектора откладываем второе
слагаемое формулы (3.23)
![]() ,
а из точки
n
проводим прямую, перпендикулярную к АВ,
т.е. параллельную слагаемому
,
а из точки
n
проводим прямую, перпендикулярную к АВ,
т.е. параллельную слагаемому
![]() .
На этой прямой должна лежать точка b.
С другой стороны искомый вектор ускорения
точки В
имеет начало в точке
П
и расположен на горизонтальной прямой.
Поэтому из точки П
проведем
горизонтальную
прямую до пересечения с ранее проведенной
прямой, перпендикулярной АВ.
Получим:
.
На этой прямой должна лежать точка b.
С другой стороны искомый вектор ускорения
точки В
имеет начало в точке
П
и расположен на горизонтальной прямой.
Поэтому из точки П
проведем
горизонтальную
прямую до пересечения с ранее проведенной
прямой, перпендикулярной АВ.
Получим:
![]() ,
,
![]() .
.
Учитывая масштаб,
найдем величины ускорений
![]() и
и
![]() :
:
![]() ,
,
![]() .
.
Угловое ускорение шатуна АВ, ε2, равно
 .
(3.24)
.
(3.24)
Изображаем угловое
ускорение ε2
дуговой стрелкой вокруг точки А
по вектору
![]() ,
считая точкуА
неподвижной; в данном случае против
хода часовой стрелки.
,
считая точкуА
неподвижной; в данном случае против
хода часовой стрелки.
Пусть теперь
требуется найти ускорение какой-либо
точки Е
шатуна АВ.
Для этого на отрезке ab
строим точку e,
делящую его в том же отношении, в
каком точка E
делит отрезок АВ.
Вектор
![]() равен ускорению
равен ускорению![]() .
Тогда вектор
.
Тогда вектор![]() равен ускорению
равен ускорению![]() .
Имеем
.
Имеем
 .
(3.25)
.
(3.25)
Соединим теперь
полюс П
с точкой е,
получим вектор
![]() .
Действительно,
.
Действительно,
![]()
![]() (3.26)
(3.26)
Так можно найти ускорение любой точки механизма в конкретном его положении.