

Методичка к системе MATLAB
.pdf
|
11 |
|
13. |
Построи ть пространственную спи раль, |
д обави ть поя снени е (legend), |
|
смени тьцвети си мволы граф и ка, установи тьновы й д и апазон и зменени я |
|
|
t, поменятьместами x, y и t в plot3. |
|
14. |
В ли тературе найти способ построени я |
сплош ны х пространственны х |
|
ф и гури вы полни тьпостроени е. |
|
15.Построи тьсф еру разли чны ми способами . |
|
|
2. M-ф айлы
По опред елени ю ф айлы , которы е сод ерж ат в себе я зы ковы е код ы |
си стемы |
MATLAB, назы ваются -ф айлами . |
|
2.1. С оздани е М -ф айлов в в и де М -сценари ев |
|
М -сценари и пред ставляют собой послед овательность д ействи й и ли |
запи сь |
вы чи сли тельны х алгори тмов, которы езатем оф ормля ются си стемой MATLAB в ви д еm-ф айлов (срасш и рени ем m) [5]. Т екст -сценари я мож етбы тьнапи сан в любом текстовом ред акторе (текстовы й д окумент) и затем перенесен в си стему MATLAB, гд ед олж енбы тьсохраненв окнеред акторакакm-ф айл.
При мер3.
1.Созд атьв команд ном окне MATLAB матри цу: а = [1 2 3;4 5 6] и ли а = [1,2,3;4,5,6];
2.Т ранспони роватьматри цу а: а1 = а' ;
3.Созд атьматри цу b = [10 20 30;40 50 60];
4.Перемнож и тьматри цы а1 и b: с = а1*b;
5. |
Н а экране созд атьнад пи сь'Перемнож ени е матри ц а1 и b:' с помощ ью |
||
|
disp('Перемнож ени ематри ца1 и b: '); |
|
|
6. |
В ы вести результатперемнож ени я , набрав в команд ной строкеобозначени ес |
||
|
и наж ав клави ш у Enter; |
|
|
7. |
Ч тобы не бы ло вы вод а промеж уточны х результатов, то в конце каж д ой |
||
|
строки (команд ы ) след уетстави тьточку сзапятой ; . |
||
8. |
Прод елатьпред ы д ущ и епункты команд сточкой сзапя той и без. |
||
9. |
Пункты 1-6 запи сатьв -ф айле. Д ля |
этого в команд ной строке набрать |
|
|
edit. К актолько откроется окно текстового ред актора, повтори тьнабор |
||
|
команд пп. 1-6 |
и сохрани тьпод каки м-ли бо и менем (напри мер, Lab1). Т ем |
|
|
самы м созд али М |
- сценари й. |
|
10.В ы йти и з ред акторав команд ноеокно MATLAB. |
|||
11.Запусти тьна вы полнени е созд анны й М |
- сценари й. Д ля этого в акти вной |
||
команд ной строкенабратьи мя М - сценари я и наж атьклави ш у Enter;
12.Д ля возвращ ени я в ред акторсцелью ред акти ровани я созд анного М - ф айла в команд ной строке набратьedit и через пробел и мя ж елаемого ф айла
(напри мер, Lab1).

|
|
|
|
12 |
|
|
|
13.В М |
- |
ф айле мож но запи сы ватькомментари и . О ни созд аются с помощ ью |
|||||
знака %. Т .е. после знака % мож но пи сатькак на русском, |
так и на |
||||||
англи йском и |
т.д . В се, что |
наход и тся за знаком |
%, |
я вля ется |
|||
невы полня емы ми |
д ействи я ми , д аж е если |
там буд ут запи саны |
станд артны е |
||||
команд ы MATLAB. |
|
|
|
|
|||
Задани е: Созд ать |
- сценари и д ля вы полнени я зад ани й пред ы д ущ ей части |
||||||
2.2. С оздани е М -ф айлов в в и де М -ф ункци й |
|
|
|||||
М -ф айлы |
могут бы тьф ункци ональны ми (М |
-ф ункци я ми ), если |
они |
сод ерж ат |
|||
аргументы |
(вход ны е переменны е) и |
созд ают вы ход ны е д анны е. |
М -ф айлы |
||||
обеспечи вают расш и ря емостьсред ы |
MATLAB, позволяют д обавля тьновы е |
||||||
встроенны е ф ункци и куж е сущ ествующ и м ф ункци я м MATLAB. М |
- ф айлы |
||||||
ти па |
-ф ункци й пред ставля ютсобой, каки |
-сценари и , обы чны е текстовы е |
|||||
ф айлы , |
созд аваемы е с помощ ью ред актора ф айлов. Н апи сани е М |
-ф ункци и |
|||||
начи нается сключевого словаfunction. |
|
|
|
||||
2.2.1. Ф орматзаголовка |
- ф ункци и : |
|
|
|
|
||
function [список выходных переменных] = <имя функции>(<список входных переменных>); % список выходных переменных может быть условным, т.е просто символ.
% Сохранение М-файла как М-функции должно быть с именем, которое указывается в поле заголовка М-функции.
При мер4. Созд ани еМ |
-ф ункци и . Созд ать -ф айл д ля вы чи слени я вы раж ени я : |
||
|
|
, гдaеa,b — чи слаи ли матри цы од и наковой размерности . |
|
= |
2 + cb2 |
||
|
В текстовом ред актореMATLAB созд аем след ующ и й М -ф айл в ви д еМ - |
||
ф ункци и : |
|
||
function c = fun1(a,b) |
|
||
= |
+ b.^2); |
c sqrt(a.^2 |
|
%Применение точки означает массивное возведение в квадрат.
%Созданную М-функцию сохраним под именем fun1? которому редактор MATLAB добавит расширение ".m".
%Обращение к функции fun1 может быть выполнено или в командном окне или в М-сценарии.
Д ля этого при мера сначалав команд ном окневы полни м след ующ и ед ействи я :
>>fun1(3,4) % в качестве аргументов выбраны значения a=3, b=4
>>ans=
5% результат выполнения М-функции fun1 с входными аргументами 3 и 4
>>% другой способ использования созданной функции fun1:
>>a=3; b=4;
>>fun1(a,b)
ans=
5
>> % с присвоением результата, например, через z1 >>z1=fun1(a,b)
z1=
5
2.2.2. О пи сани еф ормата -ф ункци и .
— ли ни я и ли строкаопред елени я ф ункци и , напри мер: function s1=sum1(n,k);
(зад аетключевоеслово function , вы ход ны еаргумены s1 , и мя ф ункци и sum1 , вход ны еаргументы ссоответствующ и м поряд ком след овани я .
— строкаи ли строки комментари ев (послезнака%)
13
— т елоф ункци и , котороесод ерж и твсевы чи слени я
В се ф ункци и си стемы MATLAB и меют строку опред елени я ф ункци и и собственно тело ф ункци и . И мя ф ункци и мож ет сод ерж атьсвы ш е 30 знаков, при чем первы й знакд олж енбы тьбуквой.
Задани е. Созд атьM-ф ункци ю д ля вы полнени я зад ани й части 1.
3. При м енени е MATLAB для анали за си ст ем ав т ом ат и ческого управ лени я
3.1. Преобразов ани е Лапласа в MATLAB — ф ункци яlaplace
>> syms x y t; |
% задание символьных переменных |
|
>> f1 = t; |
% зададим функцию-оригинал; |
|
>> L1 = laplace(f1) |
% определение изображения по Лапласу от линейной функции; |
|
>> f2 |
= sym('10'); |
% функцию f2 = 10 выражаем в символьном виде; |
>> L2 = laplace(f2) |
% определение изображения от постоянной; |
|
>> f3 |
= sym('3')*t + sym('7'); % оригинал линейной функции; |
|
>> L3 = laplace(f3) |
% изображение линейной функции; |
|
>> f4 |
= exp(-t); |
% оригинал экспоненциальной функции (со знаком минус); |
>> L4 = laplace(f4) |
% изображение экспоненциальной функции ; |
|
>> f5 |
= exp(t); |
% оригинал экспоненциальной функции (со знаком плюс); |
>> L5 = laplace(f5) |
% изображение экспоненциальной функции ; |
|
>>L6 = laplace(exp(t))
>>f6 = sin(x);
>> L6 = laplace(f6) |
% изображение тригонометрической функции sin(x); |
|
|
|
|||||||||
>> L7 = laplace(cos(x)) |
% изображение тригонометрической функции cos(x); |
|
|
|
|||||||||
3.2. С оздани е передат очны х ф ункци й— tf |
|
|
|
|
|
|
|
||||||
% См. help tf; |
|
|
|
|
|
|
|
|
|
|
|
||
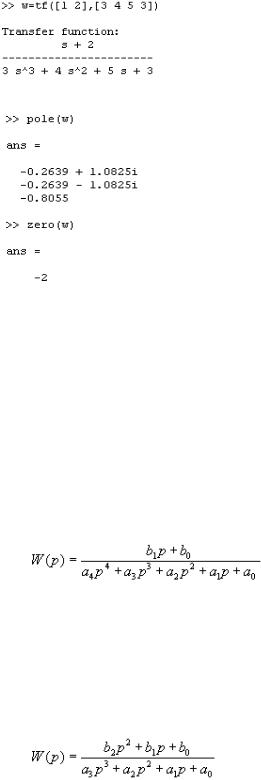
При мер5. Сф орми руем след ующ ую перед аточную ф ункци ю W1: |
|
|
|
||||||||||
|
|
|
|
|
12 |
|
. |
|
|
|
|
|
|
|
|
|
|
W1 = |
s3 2s2 3+s + 1 |
+ |
|
|
|
|
|||
Д ля этого в команд ной строкеMATLAB наби раем (и ли созд аем |
-сценари й): |
|
|
||||||||||
>> W1=tf(12,[1 2 3 1]) |
|
|
|
|
|
|
|
|
|
|
|
||
% Результат возвращается в виде: |
|
|
|
|
|
|
|
|
|
||||
Transfer function: |
|
|
|
|
|
|
|
|
|
|
|
||
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
--------------------- |
|
|
|
|
|
|
|
|
|
|
|
||
s^3 + 2 s^2 + 3 s + 1 |
|
|
|
|
|
|
|
|
|
|
|
||
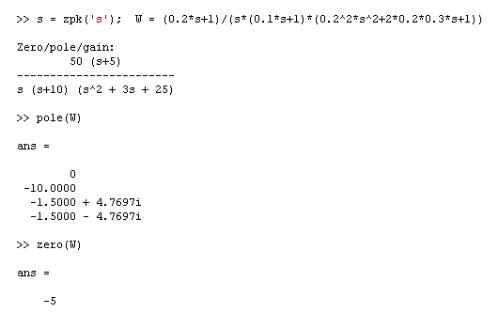
Ф орми ровани еперед аточны х ф ункци й сразлож ени ем намнож и тели чи сли теля |
|
||||||||||||
и |
знаменателя |
с |
зад анны м |
коэф ф и ци ентом |
перед ачи |
осущ ествляется |
с |
|
|||||
помощ ью команд ы |
zpk (zero-pole-gain), |
си мвол k |
отображ ает gain. |
|
|||||||||
(нули перед аточной ф ункци и |
— это корни |
чи сли теля , |
полюса — корни |
|
|||||||||
знаменателя ) |
|
|
|
|
|
|
|
|
|
|
|
||
При мер 6. Сф орми руем |
перед аточную |
|
|
ф ункци ю |
со |
стати чески м |
|
||||||
коэф ф и ци ентом, |
равны м 7.7, |
и с полюсами |
|
|
= − |
= − |
3 1= − |
7. . 122 |
s , 25 |
||||
Н азовем ееперед аточной ф ункци ей свы д еленны ми нулями и полюсами . |
|
|
|||||||||||
В |
команд ной строкеMATLAB наби раем: |
|
|
|
|
|
|
|
|||||
>> W3=zpk([],[-3.3,-0.25,-12.7],7.7)
%Результат возвращается в виде: Zero/pole/gain:
7.7
-------------------------
(s+3.3) (s+12.7) (s+0.25)
%Символ [] означает, что в числителе передаточной функции характеристический полином %нулевой

|
|
|
|
14 |
|
|
|
|
|
При мер |
7. |
|
Сф орми руем |
перед аточную ф ункци ю со |
стати чески м |
|
|||
коэф ф и ци ентом, равны м 7.7, |
с полюсами |
= − |
= − |
= − 7. 12 |
s , 25 . 0 |
||||
|
|
3 1 |
и 2с |
|
|||||
нуля ми |
1 = − |
2 = +4 . S S |
, 5 |
|
|
|
|
|
|
В команд ной строкеMATLAB наби раем:
>> W4=zpk([4,-5],[-3.3,-0.25,-12.7],7.7)
% Результат возвращается в виде: Zero/pole/gain:
7.7 (s-4) (s+5)
-------------------------
(s+3.3) (s+12.7) (s+0.25)
3.3. Взаи м ное преобразов ани е ф орм передат очны х ф ункци й
Преобразуем полученную перед аточную ф ункци ю W4 в раци ональную ф орму:
% В командной строке MATLAB набираем:
»w44=tf(W4)
%Результат возвращается в виде: Transfer function:
7.7s^2 + 7.7 s - 154
---------------------------------
s^3 + 16.25 s^2 + 45.91 s + 10.48
Преобразуем раци ональную перед аточную ф ункци ю в ф орму свы д еленны ми нуля ми и полюсами :
% В командной строке MATLAB сформируем простую передаточную функцию вида:
W 5 = 10
s2 + 3s + 2 . W5=tf(10,[1,3,2])
% Результат возвращается в виде: Transfer function:
10
-------------
s^2 + 3 s + 2
% Полученная передаточная функция соответствует описанию объекта, состоящего из двух
последовательно соединенных инерционных звеньев с результирующим коэффициентом
передачи, равным 10, и постоянными времени 1 = |
2 = 2 . TT , 1 |
%Передаточная функция с выделенными нулями и полюсами w55: w55=zpk(W5) % Формат преобразования
%Результат преобразования
Zero/pole/gain: |
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
--------- |
|
|
|
|
|
|
|
|
(s+2)(s+1) |
|
|
|
|
|
|
|
|
% Преобразуем раци ональную |
перед аточную |
ф ункци ю |
W2 в ф орму |
с |
||||
вы д еленны ми нуля ми и полюсами : |
|
|
|
|
|
|||
w22=zpk(W2) % Формат преобразования |
|
|
|
|
|
|||
% Результат преобразования |
|
|
|
|
|
|
||
Zero/pole/gain: |
|
|
|
|
|
|
|
|
3 (s^2 + 1.667s + 1.333) |
|
|
|
|
|
|
|
|
-------------------------------- |
|
|
|
|
|
|
|
|
(s+0.4302) (s^2 + 1.57s + 2.325) |
|
|
|
|
|
|
|
|
3.4. О ценка |
ди нам и ки объект а |
управ лени я по заданной передат очной |
||||||
ф ункци и |
|
|
|
|
|
|
|
|
Д и нами ка объекта |
управлени я |
опред еля ется |
знаменателем |
перед аточной |
||||
ф ункци и , точнее корня ми |
характери сти ческого уравнени я , |
составленного и з |
||||||
знаменателя . |
Е сли |
корни |
характери сти ческого уравнени я |
"левы е", |
то |
|||

15
соответствующ и й переход ны й процессбуд етустанови вш и мся , если ж екорни "правы е", то переход ны й процесс буд етнеустанови вш и мся , т.е. стреми ться к
бесконечности (по вы ход ной |
коорд и нате объекта и ли |
по всем возмож ны м |
||
коорд и натам). |
|
|
|
|
Д ля расчета корней характери сти ческого уравнени я |
мож но |
и спользовать |
||
ф ункци ю eig. |
|
|
|
|
При мер 8. О пред ели м корни |
характери сти ческого уравнени я |
д ля объекта с |
||
|
|
w55. |
|
|
перед аточной ф ункци ей W5 и |
|
|
||
»eig(W5) % W5 — рациональная передаточная функция ans =
-2 -1
»eig(w55) % w55 — передаточная функция с выделенными нулями и полюсами ans =
-2 -1
%Результат получен один и тот же. Форма w55 позволяет сразу определить корни, если
%они простые
3.5. Д и нам и чески е и част от ны е х аракт ери ст и ки |
С А У [6] |
|||
Переход ны ехарактери сти ки — step. |
|
|||
О пред елени е. |
Переход ной |
характери сти кой (ф ункци ей) объекта (си стемы ) |
||
управлени я |
назы вается его |
реакци я во времени |
при возд ействи и на него |
|
ед и ни чной ф ункци и (ед и ни чного скачка) при нулевы х начальны х услови я х. |
||||
%Форматы записи step рассмотрим на примерах с передаточными функциями. |
||||
W1=tf(12,[1 2 3 1]); % Рациональная передаточная функция |
|
|||
» step(W1),grid |
|
% С автоматическим установлением временного интервала |
||
» step(W1,25),grid |
% С задаваемым установлением временного интервала от 0 до 25 |
|||
» Z=zpk([],[-1 -2],4); % Функция с выделенными нулями и полюсами |
||||
» step(Z),grid |
% С автоматическим установлением временного интервала |
|||
» step(Z,13),grid |
% С задаваемым временным интервалом от 0 до 13 |
|||
» step(Z,13,'r*'),grid,hold on,step(W1,'g*')% Совмещение двух графиков— 1сп. |
||||
» step(Z,13,'r*',W1,'g*'),grid % Совмещение двух графиков — 2-й способ |
||||
И мпульсны ехарактери сти ки — impulse. |
|
|||
Опр ед ел ен ие. И мпульсной характери сти кой (ф ункци ей) си стемы |
назы вается |
||
реакци я си стемы |
во времени при возд ействи и нанееф ункци и δ(t) |
Д и рака (с |
|
бесконечно больш ой ампли туд ой и бесконечной малой д ли тельности ). |
|||
%Форматы записи impulse рассмотрим на примерах с передаточными функциями. |
|
||
W1=tf(12,[1 2 3 1]); % Рациональная передаточная функция |
|
||
» impulse(W1),grid |
|
% С автоматическим установлением временного интервала |
|
» impulse(W1,25),grid |
% С задаваемым установлением временного интервала от 0 до 25 |
||
» Z=zpk([],[-1 -2],4); % Функция с выделенными нулями и полюсами |
|
||
» impulse(Z),grid |
% С автоматическим установлением временного интервала |
|
|
» impulse(Z,13),grid |
% С задаваемым временным интервалом от 0 до 13 |
|
|
» impulse(Z,13,'r*'),grid,hold on,step(W1,'g*')% Совмещение графиков— 1сп. » impulse(Z,13,'r*',W1,'g*'),grid % Совмещение графиков — 2-й способ
При мер8.
Пустьзад анаперед аточная ф ункци я СА У
 .
.
Н айд ем ее д и нами чески е и частотны е характери сти ки (в команд ном окне
MATLAB.
1. Созд ад и м LTI-объектси менем w, д ля этого вы полни м:
16
2. Н айд ем полюсаи нули перед аточной ф ункци и си спользовани ем команд pole, zero.
3.Построи м переход ную ф ункци ю команд ой step(w).
4.Построи м и мпульсную переход ную ф ункци ю команд ой impulse(w).
5.Д и аграмму Бод еполучи м, и спользуя команд у bode(w).
6. О пред ели м частотны й год ограф |
Н айкви ста, вы полни в команд у nyquist(w). |
|
|
|
|
|
|||||||||
А налоги чны е результаты |
мож но получи ть, |
и спользуя |
команд у ltiview(w), с |
||||||||||||
соответствующ и ми настройками в меню “Plot Configuration”. |
|
|
|
|
|
||||||||||
К аж д ая и з построенны х |
характери сти кполностью и |
од нозначно опред еляет |
|||||||||||||
рассматри ваемую си стему управлени я. |
|
|
|
|
|
|
|
|
|
|
|
||||
Задани е - вы полни тьперечи сленны ед ействи я сод ни м и з вари антов: |
|
|
|
||||||||||||
№ |
В и д перед аточной ф ункци и |
|
№ |
К о эф ф иц ие нты п о лино м о в |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b0 |
b1 |
a0 |
|
a1 |
|
a2 |
|
a3 |
а4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. |
|
|
|
1. |
0 |
3 |
1 |
|
2 |
|
3 |
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
2 |
6 |
4 |
|
0 |
|
1 |
|
5 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
0 |
-3 |
5 |
|
2 |
|
0 |
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
4 |
2 |
3 |
|
4 |
|
5 |
|
3 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
0 |
1 |
-2 |
|
-2 |
|
-3 |
|
-2 |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b0 |
b1 |
b2 |
|
a0 |
|
a1 |
|
a2 |
а3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
|
|
|
1. |
0 |
-3 |
2 |
|
4 |
|
2 |
|
3 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
8 |
0 |
-3 |
|
-4 |
|
-6 |
|
-4 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
-4 |
6 |
-2 |
|
5 |
|
5 |
|
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
6 |
-8 |
-7 |
|
0 |
|
-6 |
|
-3 |
-1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
2 |
-1 |
-3 |
|
-1 |
|
0 |
|
-7 |
-2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b0 |
b1 |
b2 |
|
a0 |
|
a1 |
|
a3 |
a4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|

17
3. |
|
|
1. |
0 |
2 |
8 |
-3 |
7 |
-7 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
-5 |
0 |
3 |
-8 |
-2 |
-1 |
-6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
-7 |
1 |
2 |
0 |
5 |
2 |
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
-6 |
4 |
-4 |
1 |
0 |
6 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
2 |
-2 |
-1 |
5 |
3 |
0 |
9 |
|
|
|
|
|
|
|
|
|
|
|
4. |
|
|
1. |
0 |
-5 |
4 |
3 |
7 |
9 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
7 |
-6 |
0 |
5 |
8 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
-2 |
-8 |
2 |
0 |
4 |
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
-7 |
-1 |
6 |
9 |
0 |
4 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
-3 |
7 |
-4 |
4 |
5 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b2 |
b3 |
a0 |
a1 |
a2 |
a3 |
a4 |
|
|
|
|
|
|
|
|
|
|
|
5. |
|
|
1. |
0 |
-5 |
4 |
3 |
7 |
9 |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
7 |
-6 |
0 |
5 |
8 |
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
-2 |
-8 |
2 |
0 |
4 |
3 |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
-7 |
-1 |
6 |
9 |
0 |
4 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5. |
-3 |
7 |
-4 |
4 |
5 |
0 |
1 |
|
|
|
|
|
|
|
|
|
|
|
3.6. |
А нали зи |
си нт езС А У м ет одом корнев огогодограф а |
|
|
|
|
||||
При менени е метод а корневого год ограф а (К Г) обусловлено ф унд аментальной зави си мостью повед ени я ли нейной СА У отполюсов и нулей ееперед аточной
ф ункци и . |
Полож ени е полюсов |
перед аточной ф ункци и |
на |
комплексной |
|||||
плоскости |
опред еля ет устойчи востьСА У , |
а в совокупности с нуля ми |
ви д |
||||||
и мпульсной переход ной ф ункци и w(t) и переход ной ф ункци и h(t). |
|
|
|||||||
М етод |
корневого год ограф апозволя етнаход и тьполюсаи нули перед аточной |
||||||||
ф ункци и |
замкнутой |
си стемы , располагая |
полюсами и нулями |
разомкнутой |
|||||
си стемы |
при и зменени и коэф ф и ци ента уси лени я |
разомкнутой |
си стемы |
k. |
|||||
М етод |
корневого |
год ограф а |
я вляется |
такж е |
метод ом |
проекти ровани я |
|||
пропорци онального устойчи вого регуля тора.
При мер9. Н еобход и мо и сслед оватьСА У сперед аточной ф ункци я разомкнутой си стемы :
 .
.
1. Созд ад и м ZPK-объект, найд ем полюсаи нули разомкнутой си стемы :
18
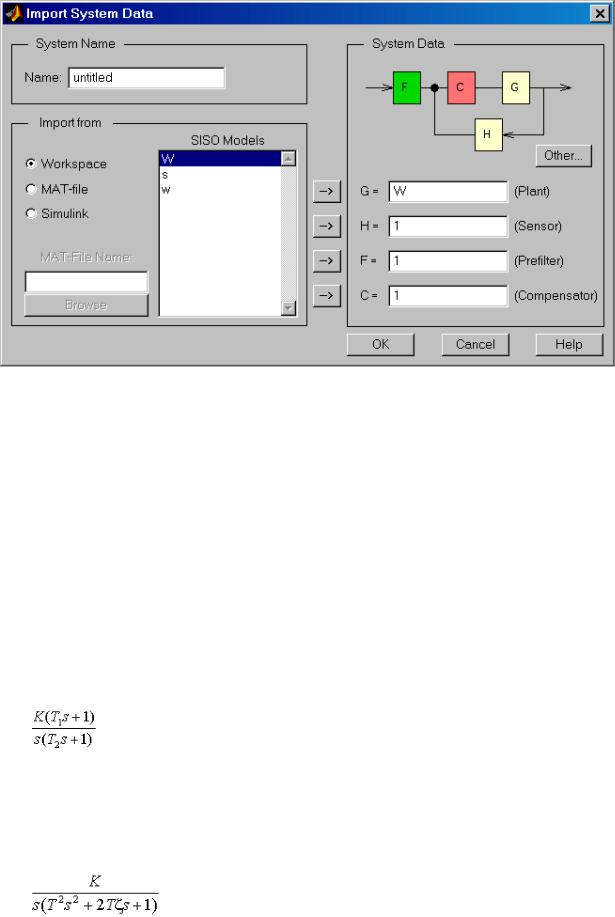
2. Запусти м SISO-Design Tool с помощ ью команд ы sisotool и ли вы бором соответствующ его пункта в окне “Launch Pad”. Затем необход и мо вы братьв меню View пунктRoot Locus (корневой год ограф ), д ля отображ ени я ред актора Root Locus Editor. В правом верхнем углу SISO-Design Tool мож но меня тьти п
обратной свя зи (кнопка “+/–” ) и |
структурную схему СА У . В |
лабораторной |
||||
работе пред полагается |
нали чи е отри цательной обратной |
связи . Затем |
||||
осущ естви м настройку параметров и |
и мпорти руем ZPK-объект и з рабочего |
|||||
пространства |
MATLAB |
(Ри с. |
3.). |
Д ля загрузки д анны х |
и з |
рабочего |
пространства |
необход и мо и спользовать меню “File/Import”, |
в |
результате |
|||
которой поя вля ется д и алог Import System Data. Н еобход и мо, чтобы в результате и мпорти ровани я д анны х получи ласьрассматри ваемая схема СА У . И спользуя Root Locus Editor (в этом окнебуд етпостроен корневой год ограф ) и значени е коэф ф и ци ента уси лени я (зд есьC – Current Compensator), след ует вы полни ть послед ующ и е пункты д анной работы . И зменени е д и нами чески х и частотны х характери сти к замкнутой си стемы при и зменени и K мож но прослед и ть,
и спользуя меню “Tools/Loop Responses”.
3. Захвати в “мы ш ью”, перед ви гатькрасны й курсорпо корневому год ограф у д о пересечени я ветвей с мни мой осью, опред ели тьзначени е Kкр. Перед ви ж ени е курсора прои сход и т такж е при ввод е значени я коэф ф и ци ента уси лени я C в соответствующ ееполеввод ав верхней части GUI-и нтерф ейса.
19
Ри с. 3.
Д ля рассматри ваемого случая Kкр≈3. Значени е ωкр соответствует мни мой коорд и нате пересечени я К Г мни мой оси . Просмотретьэто значени е мож но в ни ж ней части и нтерф ейсаи ли вы брав меню пункт“View/Closed-Loop Poles”.
4. Зад ад и м значени я 0.5Kкр и 0.25Kкр и опред ели м значени я полюсов.
5. Н апри мер, д ля значени я 0.5Kкр построи м ви д переход ной ф ункци и замкнутой си стемы . Д ля этого необход и мо вы брать в меню пункт “Tools/Loop Responses/Closed-Loop Step”. По результатам построени я переход ной ф ункци и
мож но сд елатьвы вод о том, |
что си стемаустойчи ва. М |
еняя значени я C, мож но |
|||||||
уви д еть в соответствующ ее и зменени е |
переход ной |
ф ункци и |
и ли д руги х |
||||||
характери сти к си стемы в |
д и нами ке. |
При и зменени и С |
прои сход и т |
||||||
автомати ческоеобновлени евы бранны х характери сти кзамкнутой си стемы . |
|||||||||
Задани е: и сследов ат ьодну и зси ст ем с заданны м и |
парам ет рам и |
|
|
||||||
№ |
В и д перед аточной ф ункци и |
|
№ |
Варианты |
п арам е тро в |
|
|
||
|
|
|
|
|
|
|
|||
|
Wp(s) |
|
|
Значени я Ti [c] |
|
|
|||
|
|
|
|
|
|
|
|
||
1. |
|
|
1. |
T1 = 0.5, T2 |
= 0.1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
T1 |
= 0.1, T2 |
= 0.01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. |
T1 |
= 0.1, T2 |
= 0.9 |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
4. |
T1 |
= 0.01, T2 = 0.1 |
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
5. |
T1 |
= 0.15, T2 = 0.2 |
|
|
||
|
|
|
|
|
|
|
|
||
2. |
|
|
1. |
T = 0.1, ζ = 1 |
|
|
|
||
|
|
|
|
|
|
|
|||
|
|
|
2. |
T = 0.05, ζ = 0.707 |
|
|
|||
|
|
|
|
|
|
|
|
|
|

20
|
|
3. |
T = 0.03, ζ = 0.1 |
|
|
|
|
|
|
4. |
T = 0.08, ζ = 0.5 |
|
|
|
|
|
|
5. |
T = 0.01, ζ = 0.15 |
|
|
|
|
3. |
|
1. |
T1 = 0.03, T2 = 0.5, T3 = 0.1, T4 = 0.05 |
|
|
|
|
|
|
2. |
T1 = 0.05, T2 = 0.4, T3 = 0.08, T4 = 0.033 |
|
|
|
|
|
|
3. |
T1 = 0.2, T2 = 0.45, T3 = 0.1, T4 = 0.05 |
|
|
|
|
|
|
4. |
T1 = 0.5, T2 = 0.25, T3 = 0.1, T4 = 0.02 |
|
|
|
|
|
|
5. |
T1 = 0.1, T2 = 0.25, T3 = 0.1, T4 = 0.05 |
|
|
|
|
4. |
|
1. |
T1 = 0.2, T2 = 0.1, |
|
|
|
T3 = 0.05, T4 = 0.07, ζ = 0.5 |
|
|
2. |
T1 = 0.07, T2 = 0.1, |
|
|
|
T3 = 0.05, T4 = 0.07, ζ = 0.5 |
|
|
3. |
T1 = 0.3, T2 = 0.1, |
|
|
|
T3 = 0.05, T4 = 0.07, ζ = 0.5 |
|
|
4. |
T1 = 0.01, T2 = 0.1, |
|
|
|
T3 = 0.1, T4 = 0.07, ζ = 0.5 |
|
|
5. |
T1 = 0, T2 = 0.1, |
|
|
|
T3 = 0.1, T4 = 0.07, ζ = 0.5 |
5. |
|
1. |
T1 = 0.05, ζ 1 = 0.3, T2 = 0.1, |
|
|
|
ζ 2 = 0.3, T3 =T4 = 0.01 |
|
|
2. |
T1 = 0.05, ζ1 = 0.3, |
|
|
|
T2 = 0.1, ζ 2 = 0.3, T3 =T4 = 0.05 |
|
|
3. |
T1 = 0.05, ζ 1 = 0.707, T2 = 0.07, |
|
|
|
ζ 2 = 0.3, T3 =T4 = 0.1 |
|
|
4. |
T1 = 0.05, ζ 1 = 0.707, T2 = 0.07, |
|
|
|
ζ 2 = 0.3, T3 =T4 = 0.05 |
|
|
5. |
T1 = 0.05, ζ 1 = 0.3, T2 = 0.05, |
|
|
|
ζ 2 = 0.3, T3 =T4 = 0.1 |
3.7. О пи сани е си ст ем в прост ранст в е сост ояни й[6,7] |
|
||||
М етод |
пространства состоя ни й (метод |
переменны х |
состояни я ) |
основан на |
|
поняти и |
"состояни еси стемы ". Состояни ед и нами ческой си стемы |
опи сы вается |
|||
совокупностью ф и зи чески х переменны х xi(t), |
..., |
xn(t), характери зующ и х |
|||
повед ени е си стемы в буд ущ ем при |
услови и , |
если |
и звестно |
состояни е в |
|
и сход ны й моментвремени и при лож енны екси стемевозд ействи я .